步骤一:移植光敏传感器代码,通过传感器采集光照亮度
1.在Keil5环境中右击“IOT-Demo”选择“Manage Project Items...”;
在“Project Items”在标签下的“Groups”中添加“Hardware”,并在该group下添加光敏传感器代码;
添加“IOT_Demo-LiteOS\targets\Hareware\BH1750”目录下的“BH1750.c”文件,点击OK;

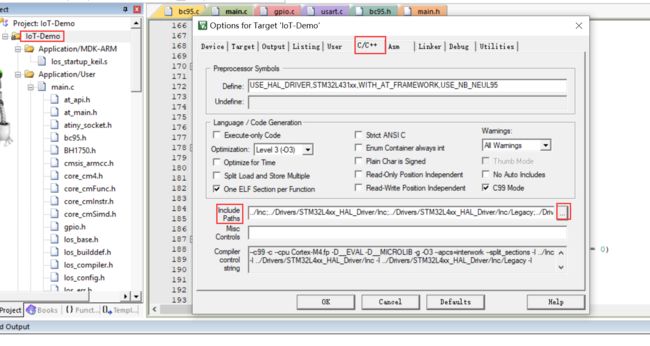
2.右击“IOT-Demo”选择“Option for Target ‘IOT-Demo’”界面下选择“C/C++”,在“Include Paths”栏添加光敏传感器代码的头文件路径(“IOT-Demo-LiteOS\targets\Hardware\BH1750”);

3.在“main.h”/* USER CODE BEGIN Includes /与/ USER CODE END Includes */之间添加引用定义标准扩展整数类型的头文件代码:
#include "stdint.h"
4.在“main.h”的/* USER CODE BEGIN Private defines /与/ USER CODE END Private defines */之间添加全局变量“msg_for_BH1750”与“BH1750_send”定义的代码:
typedef struct
{
uint8_t messageId;
char Data[5];
} msg_for_BH1750;
extern msg_for_BH1750 BH1750_send;

5.在“main.c”的/* USER CODE BEGIN Includes /与/ USER CODE END Includes */之间添加引用光敏传感器头文件的代码与BH1750数据的全局变量,添加光敏传感器数据上报时携带messageld的代码:
msg_for_BH1750 BH1750_send={02};
6.在“main.c”的/* USER CODE BEGIN 0 /与/ USER CODE END 0 */之间添加光敏传感器任务的代码;定义光敏传感器任务名“LightSensor_task”,优先级为0;通过该任务,对光敏传感器进行初始化,并打印任务信息与光敏传感器数据,代码:
VOID LightSensor_task(VOID)
{
UINT32 uwRet = LOS_OK;
short int Data;
Init_BH1750();
while(1)
{
printf("This is LightSensor_task!\r\n");
Data = (int)Convert_BH1750();
printf("\r\n***********************BH1750 Value is %d\r\n", Data);
sprintf(BH1750_send.Data, "%5d", Data);
uwRet = LOS_TaskDelay(500);
if (uwRet != LOS_OK)
return;
}
}
UINT32 creat_LightSensor_task()
{
UINT32 uwRet = LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio = 0;
task_init_param.pcName = "LightSensor_task";
task_init_param.pfnTaskEntry = (TSK_ENTRY_FUNC)LightSensor_task;
task_init_param.uwStackSize = 0x800;
uwRet = LOS_TaskCreate(&g_TskHandle, &task_init_param);
if (LOS_OK != uwRet)
{
return uwRet;
}
return uwRet;
}
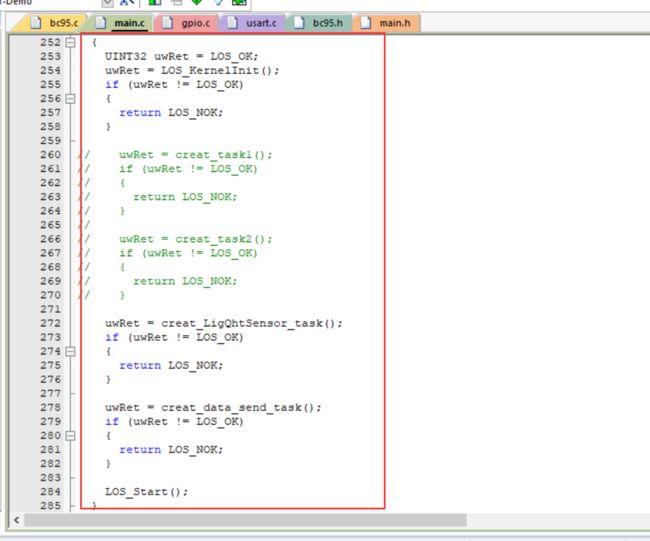
7.基于步骤3在”main.c"的/* USER CODE BEGIN 2 * / 与/* USER CODE END2 */之间生成的代码,添加创建光敏传感器任务的代码,并注释创建task1与task2的代码:
{
UINT32 uwRet = LOS_OK;
uwRet = LOS_KernelInit();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
// uwRet = creat_task1();
// if (uwRet != LOS_OK)
// {
// return LOS_NOK;
// }
//
// uwRet = creat_task2();
// if (uwRet != LOS_OK)
// {
// return LOS_NOK;
// }
uwRet = creat_LigQhtSensor_task();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
LOS_Start();
}
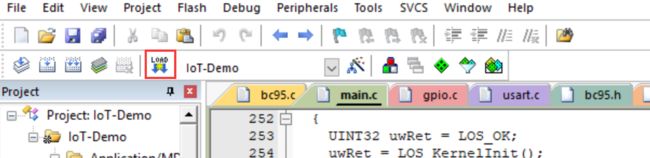
8.点击“Rebuild”,编译工程;
9.出现0 error时,才可以连接板子,点击“Download”,下载程序至开发板;
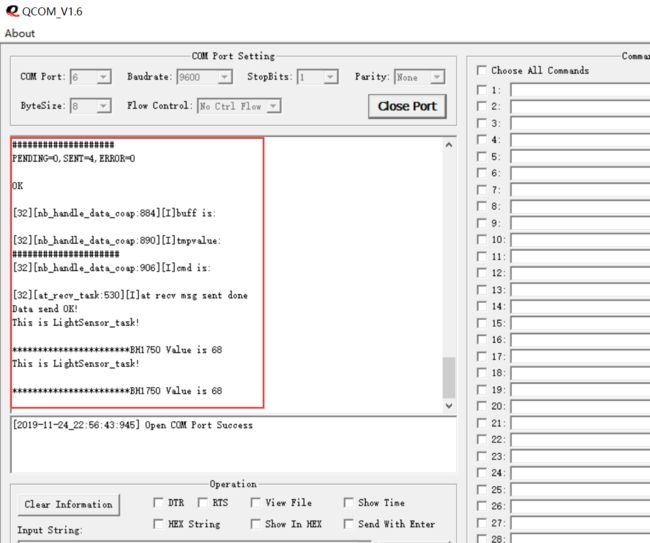
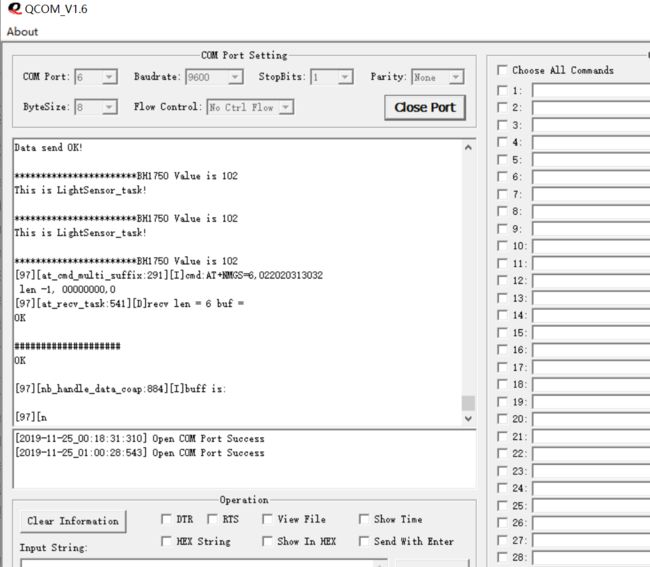
10.打开QCOM串口调试助手,根据对应的串口,选择对应的串口号,配置相应信息,按下"MCU_ RST",开发板运行程序;此时在QCOM上可以看到任务打印的信息。
步骤二:移植NB入网代码,通过NB模组将数据上报至平台
1.登录OceanConnect平台,用实验一的项目,但是需要将其余设备删除(设备标识码(IMEI号)只可唯一使用)。

2.打开Keil,在Keil中右击"loT-Demo"选择”Manage Project Items.." ;
在"Project Items'标签下的"Aplcation/User"中添加"IoT Demo-LiteOSItargetslSrc"目录下的"at hal.c"文件(注: "at _ hal.c" 文件包含用于连接LiteOS与HAL函数库控制外设的代码);

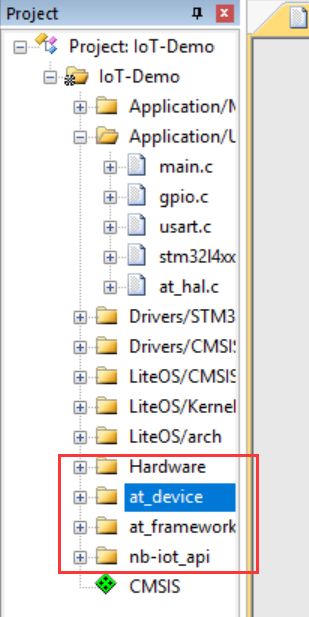
3.在"Project Items'标签下的"Groups"中添加"at _ device", 并在该group下添加基于LiteOS 的NB 模组代码;添加”loT-Demo-LiteOS\components\net\at device\ nb _ bc95" 目录下的"bc95.c"文件;

4.在" Project items '标签下的"Groups"中添加"at _ framework",并在该group下添加LiteOS AT框架实现的代码;添加"IoT-Demo-Lite0S\components\net\at _ frame'" 目录下的全部.C文件;
5.在" Project items '标签下的"Groups"中添加"nb-iot _ api",并在该group下添加基于LiteOS的NB-Iot API的代码,
添加"IoT-Demo-Lite0S\components\connectivity\nb _ iot'" 目录下的los_nb_api.C文件;

6.完成NB模组与AT框架相关代码添加,点击OK;
添加完成后,Keil的Project导航栏出现相应的文件;
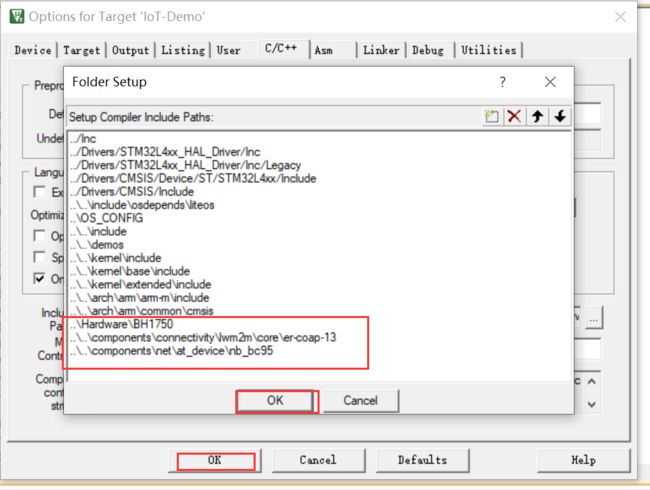
7.在"Option for Target 'loT-Demo'”界面下选择"C/C++”,在"Define" 中添加全局宏定义标识符: "WITH AT_ FRAMEWORK","USE_ NB_NEUL95";
8.在"Include Paths"栏添加相应文件的头文件路径;头文件路径分别为:
"loT-Demo-LiteOS\components\connectivity\lwm2m\core\er-coap-13"
”IoT-Demo-LiteOS\components\net\at device\nb bc95"
9.在main.c的/ * USER CODE BEGIN Icudes * /与/* USER CODE END Includes */之间添加调用AT框架与BC95头文件的代码,并声明BC95入网的全局变量;
#if defined WITH_AT_FRAMEWORK
#include "at_frame/at_api.h"
#if defined USE_NB_NEUL95
#include "nb_iot/los_nb_api.h"
#include "at_device/bc95.h"
#endif
#endif
msg_sys_type bc95_net_data;

10.在"main h"的/* USER CODE BEGIN Private defines * / 与/* USER CODE END Private defines */之间添加”msg. sys_ type bc95_ net_ data' 定义的代码;
typedef struct
{
char net_nmgr[30];
} msg_sys_type;
extern msg_sys_type bc95_net_data;

11.在"main.c"的/ * USER CODE BEGIN 0 * /与/ *USER CODE END 0“/之间添加BC95模组入网连接平台发送数据任务代码;定义该任务名为"data_send_task" ,优先级为1;通过该任务,MCU向BC95发送平台ip及port信息和光敏传感器数据并通过串口打印发送结果:
VOID data_send_task(VOID)
{
UINT32 uwRet = LOS_OK;
los_nb_init((const int8_t*)"49.4.85.232", (const int8_t*)"5683", NULL);
los_nb_notify("+NNMI:", strlen("+NNMI:"), NULL, nb_cmd_match);
LOS_TaskDelay(3000);
while(1)
{
if (los_nb_report((const char*)(&BH1750_send), sizeof(BH1750_send)) >= 0)
printf("Data send OK!\n");
else
printf("Data send Failed!\n");
uwRet = LOS_TaskDelay(2000);
if (uwRet != LOS_OK)
return;
}
}
UINT32 creat_data_send_task()
{
UINT32 uwRet = LOS_OK;
TSK_INIT_PARAM_S task_init_param;
task_init_param.usTaskPrio = 1;
task_init_param.pcName = "data_send_task";
task_init_param.pfnTaskEntry = (TSK_ENTRY_FUNC)data_send_task;
task_init_param.uwStackSize = 0x400;
uwRet = LOS_TaskCreate(&g_TskHandle, &task_init_param);
if (uwRet != LOS_OK)
{
return uwRet;
}
return uwRet;
}
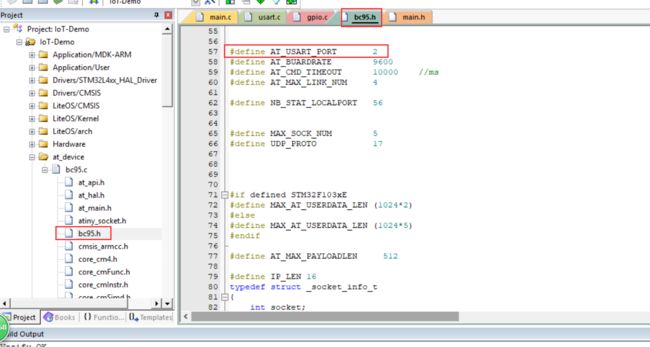
12.打开' 'bc95.h”, 在该文件中修改AT _USART_PORT为2 (本 实验开发板MCU通过USART2向BC95模组发送数据,不同开发板根据实际硬件情况配置);
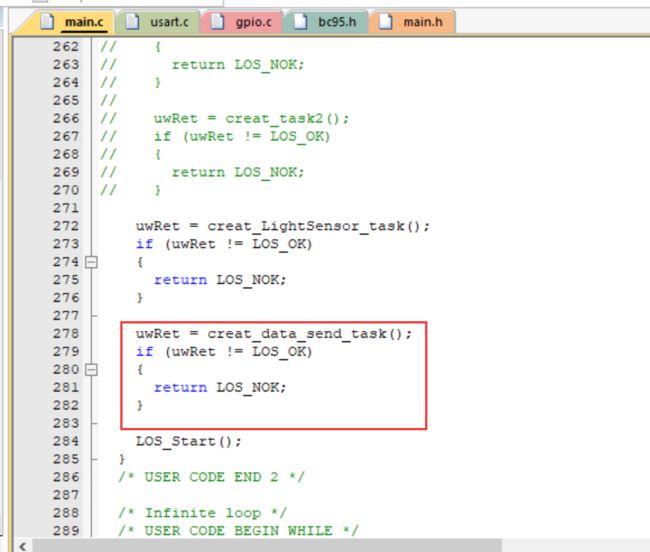
13.基于步骤1在"main.C" 的/* USER CODE BEGIN2 * /与/ * USER CODE END2 */之间生成的代码,添加创建BC95模组入网连接平台发送数据任务的代码;
{
UINT32 uwRet = LOS_OK;
uwRet = LOS_KernelInit();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
// uwRet = creat_task1();
// if (uwRet != LOS_OK)
// {
// return LOS_NOK;
// }
//
// uwRet = creat_task2();
// if (uwRet != LOS_OK)
// {
// return LOS_NOK;
// }
uwRet = creat_LightSensor_task();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
uwRet = creat_data_send_task();
if (uwRet != LOS_OK)
{
return LOS_NOK;
}
LOS_Start();
}
14.点击Rebuild,编译工程;
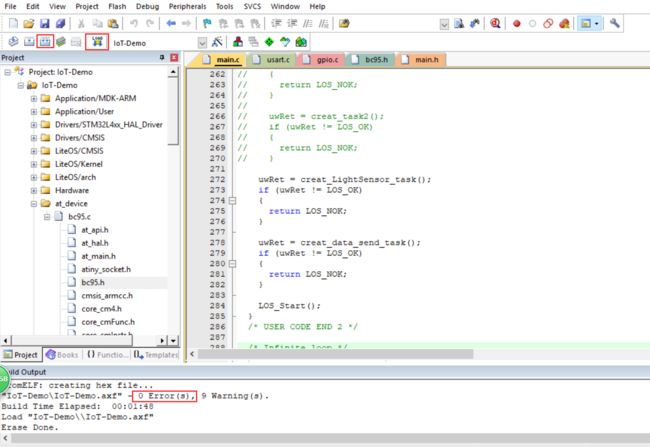
出现0 error时,才可以连接板子,点击Download,下载程序至开发板;
15.打开QCOM串口调试助手,根据对应的串口,选择对应的串口号,配置相应信息;通过跳线帽将开发板.上的UART1的RX和TX与CH340的TX和RX连接,将开发板上的UART2的RX和TX与NB-IoT的TX和RX连接;按下"MCU_ RST",开发板运行程序;此时在QCOM上可以看到任务打印的信息。

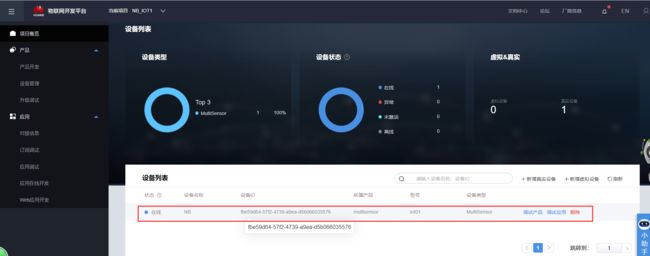
16.登陆平台,可以查看到注册的设备处于在线状态, 通过历史数据”可以查看到开发板上报的数据:

步骤三:编写命令响应代码,通过平台下发命令开关光敏传感器上的LED灯
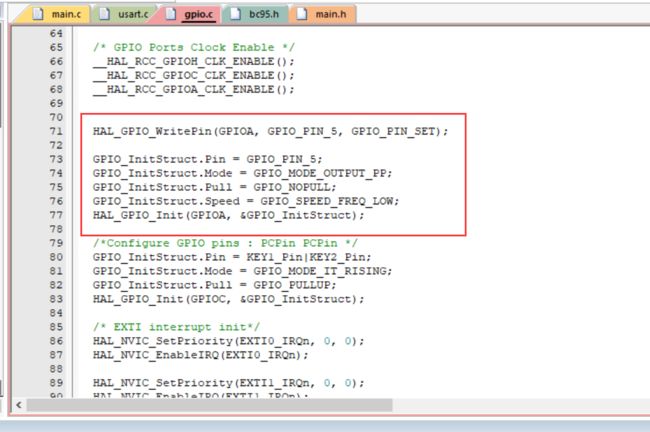
1.MCU通过PA5口控制光敏传感器上的LED灯;打开“gpio.c”,在GPIO初始化函数下添加PIN5的初始化代码;
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
2.打开“main.h”,添加定义LED引脚代码;
#define Light_Pin GPIO_PIN_5
#define Light_GPIO_Port GPIOA
3.打开“bc95.c”,在该.c文件中添加接收命令代码,根据命令执行控制LED灯代码及命令答复代码;
static int32_t nb_handle_data_coap(const char* buf)
{
int readln = 0;
char tmpbuf[1064] = {0};
if(NULL == buf)
{
AT_LOG("param invalid!");
return -1;
}
printf("####################%s\n", (char*)buf);
sscanf((char*)buf, "\r\n+NNMI:%d,%s\r\n", &readln, tmpbuf);
AT_LOG("buff is: %s\n", tmpbuf);
char tmpvalue[7] = {0};
strcpy(tmpvalue, &tmpbuf[6]);
AT_LOG("tmpvalue:%s", tmpvalue);
char tempMid[5] = {0};
strncpy(tempMid, &tmpbuf[2], 4);
printf("#####################%s\n", tempMid);
char mid[2] = {0};
memset(bc95_net_data.net_nmgr, 0, 30);
if(readln > 0)
{
HexStrToStr(tmpvalue, bc95_net_data.net_nmgr, strlen(tmpvalue));
HexStrToStr(tempMid, mid, strlen(tempMid));
}
AT_LOG("cmd is:%s\n", bc95_net_data.net_nmgr);
if(strlen(bc95_net_data.net_nmgr) > 0)
{
char report[20] = {0};
report[0] = 4;
report[1] = 0;
report[2] = mid[0];
report[3] = mid[1];
report[4] = 0;
if(strcmp(bc95_net_data.net_nmgr, "ON") == 0)
{
HAL_GPIO_WritePin(Light_GPIO_Port, Light_Pin, GPIO_PIN_RESET);
}
if(strcmp(bc95_net_data.net_nmgr, "OFF") == 0)
{
HAL_GPIO_WritePin(Light_GPIO_Port, Light_Pin, GPIO_PIN_SET);
}
if(los_nb_report((const char*) (&report), 5) >= 0)
printf("cmd send OK\n");
else
printf("cmd send fail!\n");
}
return 0;
}
4.在打开“bc95.c”的“nb_cmd_match”回调函数中,将“nb_handle_data_ind(buf);”改为“nb_handle_data_coap(buf);”;

在步骤二“main.c”中创建的“data_send_task”任务中添加命令回复代码;
los_nb_notify("+NNMI:", strlen("+NNMI:"), NULL, nb_cmd_match);
5.点击“Rebuild”,编译工程;
出现0 error时,才可以连接板子,点击Download,下载程序至开发板;
打开QCOM串口查看光敏传感器上传的光照亮度值。
登陆平台,在设备历史数据处查看光敏传感器上传的光照亮度值。

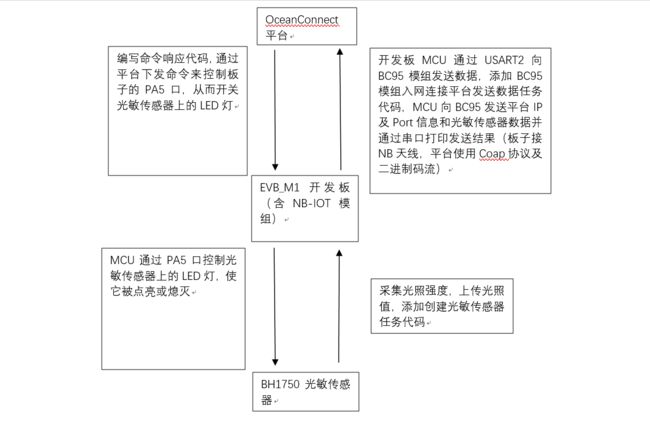
实验结构图: