图卷积神经网络笔记——第六章:(2)基于PyTorch的交通流量预测
上一小节介绍了交通流量数据的处理,主要是把拿到的数据的结构信息(邻接矩阵)和节点信息(流量数据)处理成了模型所需要的train_data和test_data,上一小节: 链接.
这一小节基于上节的交通流量数据来构造图卷积模型,预测未来时刻的交通流量情况.分别使用GCN,ChebNet和GAT三种模型来构造.
项目GitHub地址:https://github.com/masizhou/traffic_prediction
目录
- 一、搭建网络框架:
- 二、定义模型
- 1、GCN模型: Y = A ^ W X Y=\hat AWX Y=A^WX
- 2、ChebNet模型
- 3、GAT模型
- 三、改进思路
在前面介绍基于PyG库的图卷积的节点分类实战的时候,就说过搭建网络框架需要四步:
(1)准备数据
(2)定义模型(模型的定义,以及输入、隐藏、输出层数)
(3)定义损失函数和优化器
(4)训练+测试(把数据灌入里面)
所以,一个好的习惯是先把整体的网络框架搭建好,之后再去实现具体的模型,这样做的好处是在后面更换模型的时候只需要改一两行代码即可。下面来看网络框架的搭建:
一、搭建网络框架:
说明都在代码中注释了,整体的思路要按上面四步来,下面来看:
# traffic_prediction.py
import os
import time
import h5py
import torch
import numpy as np
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.utils.data import DataLoader
from traffic_dataset import LoadData # 这个就是上一小节处理数据自己写的的类,封装在traffic_dataset.py文件中
from utils import Evaluation # 三种评价指标以及可视化类
from utils import visualize_result
from gcnnet import GCN
from chebnet import ChebNet
from gat import GATNet
def main():
os.environ["CUDA_VISIBLE_DEVICES"] = "0" # 配置GPU,因为可能有多个GPU,这里用了第0号GPU
# 第一步:准备数据(上一节已经准备好了,这里只是调用而已,链接在最开头)
train_data = LoadData(data_path=["PeMS_04/PeMS04.csv", "PeMS_04/PeMS04.npz"], num_nodes=307, divide_days=[45, 14],
time_interval=5, history_length=6,
train_mode="train")
train_loader = DataLoader(train_data, batch_size=64, shuffle=True, num_workers=32) # num_workers是加载数据(batch)的线程数目
test_data = LoadData(data_path=["PeMS_04/PeMS04.csv", "PeMS_04/PeMS04.npz"], num_nodes=307, divide_days=[45, 14],
time_interval=5, history_length=6,
train_mode="test")
test_loader = DataLoader(test_data, batch_size=64, shuffle=False, num_workers=32)
# 第二步:定义模型(这里其实只是加载模型,关于模型的定义在下面单独写了,先假设已经写好)
# my_net = GCN(in_c=6, hid_c=6, out_c=1) # 加载GCN模型
# my_net = ChebNet(in_c=6, hid_c=6, out_c=1, K=2) # 加载ChebNet模型
my_net = GATNet(in_c=6 * 1, hid_c=6, out_c=1, n_heads=2) # 加载GAT模型
device = torch.device("cuda" if torch.cuda.is_available() else "cpu") # 定义设备
my_net = my_net.to(device) #模型送入设备
# 第三步:定义损失函数和优化器
criterion = nn.MSELoss() # 均方损失函数
optimizer = optim.Adam(params=my_net.parameters()) # 没写学习率,表示使用的是默认的,也就是lr=1e-3
# 第四步:训练+测试
# Train model
Epoch = 10 # 训练的次数
my_net.train() # 打开训练模式
for epoch in range(Epoch):
epoch_loss = 0.0
start_time = time.time()
for data in train_loader: # ["graph": [B, N, N] , "flow_x": [B, N, H, D], "flow_y": [B, N, 1, D]],一次把一个batch的训练数据取出来
my_net.zero_grad() # 梯度清零
predict_value = my_net(data, device).to(torch.device("cpu")) # [B, N, 1, D],由于标签flow_y在cpu中,所以最后的预测值要放回到cpu中
loss = criterion(predict_value, data["flow_y"]) # 计算损失,切记这个loss不是标量
epoch_loss += loss.item() # 这里是把一个epoch的损失都加起来,最后再除训练数据长度,用平均loss来表示
loss.backward() # 反向传播
optimizer.step() # 更新参数
end_time = time.time()
print("Epoch: {:04d}, Loss: {:02.4f}, Time: {:02.2f} mins".format(epoch, 1000 * epoch_loss / len(train_data),
(end_time-start_time)/60))
# Test Model
# 对于测试:
# 第一、除了计算loss之外,还需要可视化一下预测的结果(定性分析)
# 第二、对于预测的结果这里我使用了 MAE, MAPE, and RMSE 这三种评价标准来评估(定量分析)
my_net.eval() # 打开测试模式
with torch.no_grad(): # 关闭梯度
MAE, MAPE, RMSE = [], [], [] # 定义三种指标的列表
Target = np.zeros([307, 1, 1]) # [N, T, D],T=1 # 目标数据的维度,用0填充
Predict = np.zeros_like(Target) #[N, T, D],T=1 # 预测数据的维度
total_loss = 0.0
for data in test_loader: # 一次把一个batch的测试数据取出来
# 下面得到的预测结果实际上是归一化的结果,有一个问题是我们这里使用的三种评价标准以及可视化结果要用的是逆归一化的数据
predict_value = my_net(data, device).to(torch.device("cpu")) # [B, N, 1, D],B是batch_size, N是节点数量,1是时间T=1, D是节点的流量特征
loss = criterion(predict_value, data["flow_y"]) # 使用MSE计算loss
total_loss += loss.item() # 所有的batch的loss累加
# 下面实际上是把预测值和目标值的batch放到第二维的时间维度,这是因为在测试数据的时候对样本没有shuffle,
# 所以每一个batch取出来的数据就是按时间顺序来的,因此放到第二维来表示时间是合理的.
predict_value = predict_value.transpose(0, 2).squeeze(0) # [1, N, B(T), D] -> [N, B(T), D] -> [N, T, D]
target_value = data["flow_y"].transpose(0, 2).squeeze(0) # [1, N, B(T), D] -> [N, B(T), D] -> [N, T, D]
performance, data_to_save = compute_performance(predict_value, target_value, test_loader) # 计算模型的性能,返回评价结果和恢复好的数据
#下面这个是每一个batch取出的数据,按batch这个维度进行串联,最后就得到了整个时间的数据,也就是
# [N, T, D] = [N, T1+T2+..., D]
Predict = np.concatenate([Predict, data_to_save[0]], axis=1)
Target = np.concatenate([Target, data_to_save[1]], axis=1)
MAE.append(performance[0])
MAPE.append(performance[1])
RMSE.append(performance[2])
print("Test Loss: {:02.4f}".format(1000 * total_loss / len(test_data)))
# 三种指标取平均
print("Performance: MAE {:2.2f} {:2.2f}% {:2.2f}".format(np.mean(MAE), np.mean(MAPE * 100), np.mean(RMSE)))
Predict = np.delete(Predict, 0, axis=1) # 将第0行的0删除,因为开始定义的时候用0填充,但是时间是从1开始的
Target = np.delete(Target, 0, axis=1)
result_file = "GAT_result.h5"
file_obj = h5py.File(result_file, "w") # 将预测值和目标值保存到文件中,因为要多次可视化看看结果
file_obj["predict"] = Predict # [N, T, D]
file_obj["target"] = Target # [N, T, D]
def compute_performance(prediction, target, data): # 计算模型性能
# 下面的try和except实际上在做这样一件事:当训练+测试模型的时候,数据肯定是经过dataloader的,所以直接赋值就可以了
# 但是如果将训练好的模型保存下来,然后测试,那么数据就没有经过dataloader,是dataloader型的,需要转换成dataset型。
try:
dataset = data.dataset # 数据为dataloader型,通过它下面的属性.dataset类变成dataset型数据
except:
dataset = data # 数据为dataset型,直接赋值
# 下面就是对预测和目标数据进行逆归一化,recover_data()函数在上一小节的数据处理中
# flow_norm为归一化的基,flow_norm[0]为最大值,flow_norm[1]为最小值
# prediction.numpy()和target.numpy()是需要逆归一化的数据,转换成numpy型是因为 recover_data()函数中的数据都是numpy型,保持一致
prediction = LoadData.recover_data(dataset.flow_norm[0], dataset.flow_norm[1], prediction.numpy())
target = LoadData.recover_data(dataset.flow_norm[0], dataset.flow_norm[1], target.numpy())
# 对三种评价指标写了一个类,这个类封装在另一个文件中,在后面
mae, mape, rmse = Evaluation.total(target.reshape(-1), prediction.reshape(-1)) # 变成常向量才能计算这三种指标
performance = [mae, mape, rmse]
recovered_data = [prediction, target]
return performance, recovered_data # 返回评价结果,以及恢复好的数据(为可视化准备的)
if __name__ == '__main__':
main()
visualize_result(h5_file="GAT_result.h5", # 可视化,在下面的 Evaluation()类中
nodes_id=120,
time_se=[0, 24 * 12 * 2], # 是节点的时间范围
visualize_file="gat_node_120")
上面对整体网络的框架搭建好了,接下来看看评价指标以及可视化:
要是对这几种评价指标不太明白,可以看这个: 链接
# utils.py
# -*- coding: utf-8 -*-
import matplotlib.pyplot as plt
import numpy as np
import h5py
class Evaluation(object):
def __init__(self):
pass
@staticmethod
def mae_(target, output):
return np.mean(np.abs(target - output))
@staticmethod
def mape_(target, output):
return np.mean(np.abs(target - output) / (target + 5)) # 加5是因为target有可能为0,当然只要不太大,加几都行
@staticmethod
def rmse_(target, output):
return np.sqrt(np.mean(np.power(target - output, 2)))
@staticmethod
def total(target, output):
mae = Evaluation.mae_(target, output)
mape = Evaluation.mape_(target, output)
rmse = Evaluation.rmse_(target, output)
return mae, mape, rmse
def visualize_result(h5_file, nodes_id, time_se, visualize_file):
file_obj = h5py.File(h5_file, "r") # 获得文件对象,这个文件对象有两个keys:"predict"和"target"
prediction = file_obj["predict"][:][:, :, 0] # [N, T],切片,最后一维取第0列,所以变成二维了,要是[:, :, :1]那么维度不会缩减
target = file_obj["target"][:][:, :, 0] # [N, T],同上
file_obj.close()
plot_prediction = prediction[nodes_id][time_se[0]: time_se[1]] # [T1],将指定节点的,指定时间的数据拿出来
plot_target = target[nodes_id][time_se[0]: time_se[1]] # [T1],同上
plt.figure()
plt.grid(True, linestyle="-.", linewidth=0.5)
plt.plot(np.array([t for t in range(time_se[1] - time_se[0])]), plot_prediction, ls="-", marker=" ", color="r")
plt.plot(np.array([t for t in range(time_se[1] - time_se[0])]), plot_target, ls="-", marker=" ", color="b")
plt.legend(["prediction", "target"], loc="upper right")
plt.axis([0, time_se[1] - time_se[0],
np.min(np.array([np.min(plot_prediction), np.min(plot_target)])),
np.max(np.array([np.max(plot_prediction), np.max(plot_target)]))])
plt.savefig(visualize_file + ".png")
对h5py不熟悉的可以看看这个:链接
接下来就剩一步,具体模型的定义,接着看。
二、定义模型
1、GCN模型: Y = A ^ W X Y=\hat AWX Y=A^WX
GCN模型介绍 链接.
下面直接开始用PyTorch框架来构造GCN模型,解释都在代码注释里.
# gcnnet.py
import torch
import torch.nn as nn
class GCN(nn.Module): # GCN模型,向空域的第一个图卷积
def __init__(self, in_c, hid_c, out_c):
super(GCN, self).__init__() # 表示继承父类的所有属性和方法
self.linear_1 = nn.Linear(in_c,hid_c) # 定义一个线性层
self.linear_2 = nn.Linear(hid_c,out_c) # 定义一个线性层
self.act = nn.ReLU() # 定义激活函数
def forward(self, data, device):
graph_data = data["graph"].to(device)[0] # [N, N] 邻接矩阵,并且将数据送入设备
graph_data = GCN.process_graph(graph_data) # 变换邻接矩阵 \hat A = D_{-1/2}*A*D_{-1/2}
flow_x = data["flow_x"].to(device) # [B, N, H, D] 流量数据
B, N = flow_x.size(0), flow_x.size(1) # batch_size、节点数
flow_x = flow_x.view(B, N, -1) # [B, N, H*D] H = 6, D = 1把最后两维缩减到一起了,这个就是把历史时间的特征放一起
# 第一个图卷积层
output_1 = self.linear_1(flow_x) # [B, N, hid_C],这个就是 WX,其中W是可学习的参数,X是输入的流量数据(就是flow_x)
output_1 = self.act(torch.matmul(graph_data, output_1)) # [B, N, N] ,[B, N, hid_c],就是 \hat AWX
# 第二个图卷积层
output_2 = self.linear_2(output_1) # WX
output_2 = self.act(torch.matmul(graph_data, output_2)) # [B, N, 1, Out_C] , 就是 \hat AWX
return output_2.unsqueeze(2) # 第2维的维度扩张
@staticmethod
def process_graph(graph_data): # 这个就是在原始的邻接矩阵之上,再次变换,也就是\hat A = D_{-1/2}*A*D_{-1/2}
N = graph_data.size(0) # 获得节点的个数
matrix_i = torch.eye(N, dtype=torch.float, device=graph_data.device) # 定义[N, N]的单位矩阵
graph_data += matrix_i # [N, N] ,就是 A+I
degree_matrix = torch.sum(graph_data, dim=1, keepdim=False) #[N],计算度矩阵,塌陷成向量,其实就是将上面的A+I每行相加
degree_matrix = degree_matrix.pow(-1) # 计算度矩阵的逆,若为0,-1次方可能计算结果为无穷大的数
degree_matrix[degree_matrix == float("inf")] = 0. # 让无穷大的数为0
degree_matrix = torch.diag(degree_matrix) # 转换成对角矩阵
return torch.mm(degree_matrix, graph_data) # 返回 \hat A=D^(-1) * A ,这个等价于\hat A = D_{-1/2}*A*D_{-1/2}
2、ChebNet模型
ChebNet模型介绍 链接.
最终的公式其实就是下面这样:

其中 β k \beta_k βk 是可学习的参数.
# chebnet.py
# -*- coding: utf-8 -*-
import torch
import torch.nn as nn
import torch.nn.init as init
class ChebConv(nn.Module): # 定义图卷积层的类
"""
The ChebNet convolution operation.
:param in_c: int, number of input channels.
:param out_c: int, number of output channels.
:param K: int, the order of Chebyshev Polynomial.
"""
def __init__(self, in_c, out_c, K, bias=True, normalize=True):
super(ChebConv, self).__init__()
self.normalize = normalize # 正则化参数,True or False
self.weight = nn.Parameter(torch.Tensor(K + 1, 1, in_c, out_c)) # [K+1, 1, in_c, out_c] ,第二个1是维度扩张,计算方便,有没有都不影响参数的大小,nn.Parameter就是把参数转换成模型可改动的参数.
# 之所以要k+1,是因为k是从0开始的
init.xavier_normal_(self.weight) # 用正态分布填充
if bias: # 偏置,就是一次函数中的b
self.bias = nn.Parameter(torch.Tensor(1, 1, out_c)) # 前面的两个1是为了计算简单,因为输出的维度是3维
init.zeros_(self.bias) # 用0填充
else:
self.register_parameter("bias", None)
self.K = K + 1
def forward(self, inputs, graph):
"""
:param inputs: the input data, [B, N, C]
:param graph: the graph structure, [N, N]
:return: convolution result, [B, N, D]
"""
L = ChebConv.get_laplacian(graph, self.normalize) # [N, N],得到拉普拉斯矩阵
mul_L = self.cheb_polynomial(L).unsqueeze(1) # [K, 1, N, N],这个就是多阶的切比雪夫多项式,K就是阶数,N是节点数量
result = torch.matmul(mul_L, inputs) # [K, B, N, C],这个就是计算完后乘x
result = torch.matmul(result, self.weight) # [K, B, N, D],计算上一步之后乘W
result = torch.sum(result, dim=0) + self.bias # [B, N, D],求和
return result
def cheb_polynomial(self, laplacian): # 计算切比雪夫多项式,也就是前面公式中的 T_k(L)
"""
Compute the Chebyshev Polynomial, according to the graph laplacian.
:param laplacian: the graph laplacian, [N, N].
:return: the multi order Chebyshev laplacian, [K, N, N].
"""
N = laplacian.size(0) # [N, N] ,节点个数
multi_order_laplacian = torch.zeros([self.K, N, N], device=laplacian.device, dtype=torch.float) # [K, N, N],初始化一个全0的多项式拉普拉斯矩阵
multi_order_laplacian[0] = torch.eye(N, device=laplacian.device, dtype=torch.float) # 0阶的切比雪夫多项式为单位阵
if self.K == 1: # 这个self.k就是前面说的0阶切比雪夫多项式
return multi_order_laplacian
else: # 大于等于1阶
multi_order_laplacian[1] = laplacian
if self.K == 2: # 1阶切比雪夫多项式就是拉普拉斯矩阵 L 本身
return multi_order_laplacian
else:
for k in range(2, self.K):
multi_order_laplacian[k] = 2 * torch.mm(laplacian, multi_order_laplacian[k-1]) - \
multi_order_laplacian[k-2] #切比雪夫多项式的递推式:T_k(L) = 2 * L * T_{k-1}(L) - T_{k-2}(L)
return multi_order_laplacian
@staticmethod
def get_laplacian(graph, normalize): # 计算拉普拉斯矩阵
"""
return the laplacian of the graph.
:param graph: the graph structure without self loop, [N, N].
:param normalize: whether to used the normalized laplacian.
:return: graph laplacian.
"""
if normalize:
D = torch.diag(torch.sum(graph, dim=-1) ** (-1 / 2)) # 这里的graph就是邻接矩阵,这个D
L = torch.eye(graph.size(0), device=graph.device, dtype=graph.dtype) - torch.mm(torch.mm(D, graph), D) # L = I - D * A * D,这个也就是正则化
else:
D = torch.diag(torch.sum(graph, dim=-1))
L = D - graph
return L
class ChebNet(nn.Module): # 定义图网络的类
def __init__(self, in_c, hid_c, out_c, K):
"""
:param in_c: int, number of input channels.
:param hid_c: int, number of hidden channels.class
:param out_c: int, number of output channels.
:param K:
"""
super(ChebNet, self).__init__()
self.conv1 = ChebConv(in_c=in_c, out_c=hid_c, K=K) # 第一个图卷积层
self.conv2 = ChebConv(in_c=hid_c, out_c=out_c, K=K) # 第二个图卷积层
self.act = nn.ReLU() # 激活函数
def forward(self, data, device):
graph_data = data["graph"].to(device)[0] # [N, N]
flow_x = data["flow_x"].to(device) # [B, N, H, D] # B是batch size,N是节点数,H是历史数据长度,D是特征维度
B, N = flow_x.size(0), flow_x.size(1)
flow_x = flow_x.view(B, N, -1) # [B, N, H*D] H = 6, D = 1把最后两维缩减到一起了,这个就是把历史时间的特征放一起
output_1 = self.act(self.conv1(flow_x, graph_data))
output_2 = self.act(self.conv2(output_1, graph_data))
return output_2.unsqueeze(2) # 在第2维度,也就是时间维度上做扩张
3、GAT模型
GAT模型介绍 链接.
实际上,GAT实现的思路可以简单的归结为下面这样:
第一步,计算节点之间的关联度:

第二步,使用softmax函数对每个节点的注意力系数进行归一化:
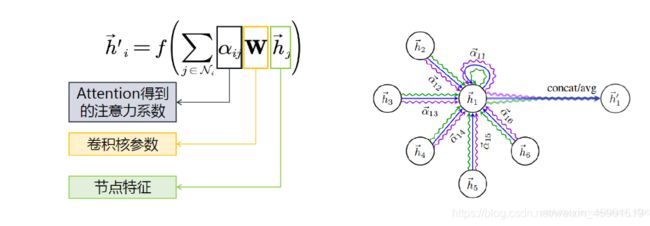
第三步,利用注意力系数对邻域节点进行有区别的信息聚合,完成图卷积操作:
下面来看代码:
# gat.py
# -*- coding: utf-8 -*-
import torch
import torch.nn as nn
import torch.nn.functional as F
class GraphAttentionLayer(nn.Module):
def __init__(self, in_c, out_c):
super(GraphAttentionLayer, self).__init__()
self.in_c = in_c
self.out_c = out_c
self.F = F.softmax
self.W = nn.Linear(in_c, out_c, bias=False) # y = W * x
self.b = nn.Parameter(torch.Tensor(out_c))
nn.init.normal_(self.W.weight)
nn.init.normal_(self.b)
def forward(self, inputs, graph):
"""
:param inputs: input features, [B, N, C].
:param graph: graph structure, [N, N].
:return:
output features, [B, N, D].
"""
h = self.W(inputs) # [B, N, D],一个线性层,就是第一步中公式的 W*h
# 下面这个就是,第i个节点和第j个节点之间的特征做了一个内积,表示它们特征之间的关联强度
# 再用graph也就是邻接矩阵相乘,因为邻接矩阵用0-1表示,0就表示两个节点之间没有边相连
# 那么最终结果中的0就表示节点之间没有边相连
outputs = torch.bmm(h, h.transpose(1, 2)) * graph.unsqueeze(0) # [B, N, D]*[B, D, N]->[B, N, N], x(i)^T * x(j)
# 由于上面计算的结果中0表示节点之间没关系,所以将这些0换成负无穷大,因为softmax的负无穷大=0
outputs.data.masked_fill_(torch.eq(outputs, 0), -float(1e16))
attention = self.F(outputs, dim=2) # [B, N, N],在第2维做归一化,就是说所有有边相连的节点做一个归一化,得到了注意力系数
return torch.bmm(attention, h) + self.b # [B, N, N] * [B, N, D],,这个是第三步的,利用注意力系数对邻域节点进行有区别的信息聚合
class GATSubNet(nn.Module): # 这个是多头注意力机制
def __init__(self, in_c, hid_c, out_c, n_heads):
super(GATSubNet, self).__init__()
# 用循环来增加多注意力, 用nn.ModuleList变成一个大的并行的网络
self.attention_module = nn.ModuleList([GraphAttentionLayer(in_c, hid_c) for _ in range(n_heads)]) # in_c为输入特征维度,hid_c为隐藏层特征维度
# 上面的多头注意力都得到了不一样的结果,使用注意力层给聚合起来
self.out_att = GraphAttentionLayer(hid_c * n_heads, out_c)
self.act = nn.LeakyReLU()
def forward(self, inputs, graph):
"""
:param inputs: [B, N, C]
:param graph: [N, N]
:return:
"""
# 每一个注意力头用循环取出来,放入list里,然后在最后一维串联起来
outputs = torch.cat([attn(inputs, graph) for attn in self.attention_module], dim=-1) # [B, N, hid_c * h_head]
outputs = self.act(outputs)
outputs = self.out_att(outputs, graph)
return self.act(outputs)
class GATNet(nn.Module):
def __init__(self, in_c, hid_c, out_c, n_heads):
super(GATNet, self).__init__()
self.subnet = GATSubNet(in_c, hid_c, out_c, n_heads)
def forward(self, data, device):
graph = data["graph"][0].to(device) # [N, N]
flow = data["flow_x"] # [B, N, T, C]
flow = flow.to(device) # 将流量数据送入设备
B, N = flow.size(0), flow.size(1)
flow = flow.view(B, N, -1) # [B, N, T * C]
"""
上面是将这一段的时间的特征数据摊平做为特征,这种做法实际上忽略了时序上的连续性
这种做法可行,但是比较粗糙,当然也可以这么做:
flow[:, :, 0] ... flow[:, :, T-1] 则就有T个[B, N, C]这样的张量,也就是 [B, N, C]*T
每一个张量都用一个SubNet来表示,则一共有T个SubNet,初始化定义 self.subnet = [GATSubNet(...) for _ in range(T)]
然后用nn.ModuleList将SubNet分别拎出来处理,参考多头注意力的处理,同理
"""
prediction = self.subnet(flow, graph).unsqueeze(2) # [B, N, 1, C],这个1加上就表示预测的是未来一个时刻
return prediction
if __name__ == '__main__': # 测试模型是否合适
x = torch.randn(32, 278, 6, 2) # [B, N, T, C]
graph = torch.randn(32, 278, 278) # [N, N]
data = {
"flow_x": x, "graph": graph}
device = torch.device("cpu")
net = GATNet(in_c=6 * 2, hid_c=6, out_c=2, n_heads=2)
y = net(data, device)
print(y.size())
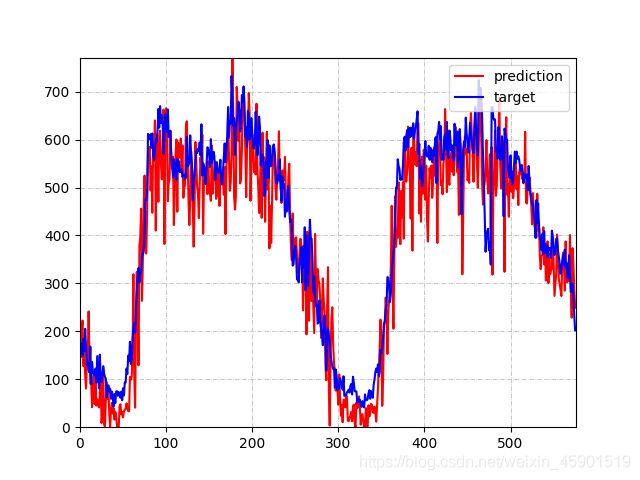
至此,整个基于图卷积的交通流量预测网络就搭建好了.下面是GAT模型的运行效果:

三、改进思路
以上使用了GCN, ChebNet, GAT三种图卷积来预测交通流量,虽然考虑到了空间的影响,但是没有考虑时序上的影响,所以能否加入RNN模型来考虑时序影响,进一步提高预测效果?
一些模型比如:STGCN, ASTGCN, DCRNN等,都是加入了时间的影响,值得借鉴.