千万注意opencv的轮廓检测和边缘检测是两码事
本文链接:https://blog.csdn.net/wsp_1138886114/article/details/82945328
1 获取轮廓
OpenCV2获取轮廓主要是用 cv2.findContours()
import cv2
img = cv2.imread('wujiaoxing.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret,binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
_,contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
draw_img0 = cv2.drawContours(img.copy(),contours,0,(0,255,255),3)
draw_img1 = cv2.drawContours(img.copy(),contours,1,(255,0,255),3)
draw_img2 = cv2.drawContours(img.copy(),contours,2,(255,255,0),3)
draw_img3 = cv2.drawContours(img.copy(), contours, -1, (0, 0, 255), 3)
print ("contours:类型:",type(contours))
print ("第0 个contours:",type(contours[0]))
print ("contours 数量:",len(contours))
print ("contours[0]点的个数:",len(contours[0]))
print ("contours[1]点的个数:",len(contours[1]))
cv2.imshow("img", img)
cv2.imshow("draw_img0", draw_img0)
cv2.imshow("draw_img1", draw_img1)
cv2.imshow("draw_img2", draw_img2)
cv2.imshow("draw_img3", draw_img3)
cv2.waitKey(0)
cv2.destroyAllWindows()
输出:
contours:类型:
第0 个contours:
contours 数量: 3
contours[0]点的个数: 6
contours[1]点的个数: 74
其中,cv2.findContours() 的第二个参数主要有
cv2.RETR_LIST:检测的轮廓不建立等级关系
cv2.RETR_TREE:L建立一个等级树结构的轮廓。
cv2.RETR_CCOMP:建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。
cv2.RETR_EXTERNAL:表示只检测外轮廓
cv2.findContours() 的第三个参数 method为轮廓的近似办法
cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
1.1 返回值:image, contours, hierarchy
contour返回值
cv2.findContours()函数首先返回一个list,list中每个元素都是图像中的一个轮廓,用numpy中的ndarray表示。
hierarchy返回值
该函数还可返回一个可选的hiararchy结果,这是一个ndarray,其中的元素个数和轮廓个数相同,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数。
2 绘出轮廓
cv2.drawContours()函数
cv2.drawContours(image, contours, contourIdx, color[, thickness[, lineType[, hierarchy[, maxLevel[, offset ]]]]])
第一个参数是指明在哪幅图像上绘制轮廓;
第二个参数是轮廓本身,在Python中是一个list。
第三个参数指定绘制轮廓list中的哪条轮廓,如果是-1,则绘制其中的所有轮廓。后面的参数很简单。其中thickness表明轮廓线的宽度,如果是-1(cv2.FILLED),则为填充模式。绘制参数将在以后独立详细介绍。
为了看到自己画了哪些轮廓,可以使用 cv2.boundingRect()函数获取轮廓的范围,即左上角原点,以及他的高和宽。然后用cv2.rectangle()方法画出矩形轮廓
"""
x, y, w, h = cv2.boundingRect(img)
参数:
img 是一个二值图
x,y 是矩阵左上点的坐标,
w,h 是矩阵的宽和高
cv2.rectangle(img, (x,y), (x+w,y+h), (0,255,0), 2)
img: 原图
(x,y): 矩阵的左上点坐标
(x+w,y+h):是矩阵的右下点坐标
(0,255,0): 是画线对应的rgb颜色
2: 线宽
"""
for i in range(0,len(contours)):
x, y, w, h = cv2.boundingRect(contours[i])
cv2.rectangle(image, (x,y), (x+w,y+h), (153,153,0), 5) 3 获取轮廓区域
new_image=image[y+2:y+h-2,x+2:x+w-2] # 先用y确定高,再用x确定宽
input_dir=("E:/cut_image/")
if not os.path.isdir(input_dir):
os.makedirs(input_dir)
cv2.imwrite( nrootdir+str(i)+".jpg",newimage)
print (i)
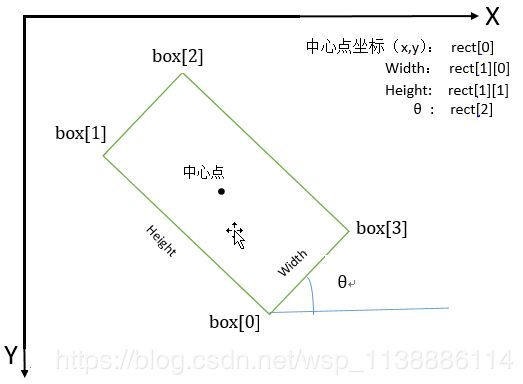
4 获取物体最小外界矩阵
使用 cv2.minAreaRect(cnt) ,返回点集cnt的最小外接矩形,cnt是所要求最小外接矩形的点集数组或向量,这个点集不定个数。
其中:cnt = np.array([[x1,y1],[x2,y2],[x3,y3],[x4,y4]]) # 必须是array数组的形式
rect = cv2.minAreaRect(cnt) # 得到最小外接矩形的(中心(x,y), (宽,高), 旋转角度)
box = np.int0(cv2.boxPoints(rect)) #通过box会出矩形框