当计算动作规划时,DMCplus动作规划使用了一组名为Eaual Concern Errors(ECEs)的tuning参数来权衡CV的相对重要性。
理想情况下,任何邻近或触犯操作限制的变量都将得到动态的控制,而在操作限之间的变量将降低重要性。这需要动态权重。
动态矩阵控制的问题:
其中,A为动态矩阵
△ I为操作变量未来动作向量
е为误差向量(控制动作所需的效果)
K为含有动作抑制因子的对角矩阵
W为由Equal Concern Errors得到的对角加权矩阵
注:...其中i为控制变量索引
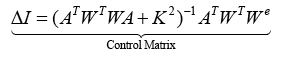
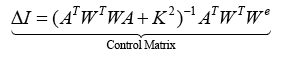
该动态矩阵控制的解决方案是:
动态权重
在动态权重中,每个CV的权重是根据CV接近操作限的程度来衡量的。
每个控制变量都有五个Equal Concern Errors并且必须指定两个Transition Zones(过渡区):
ECE_LPHI 对于稳态值或目标>=上限的Equal Concern Error
ECE_CMLO 对于控制矩阵值和目标<=下限的Equal Concern Error
ECE_CMMID 对于控制矩阵值和目标在操作限之间的Equal Concern Error
ECE_CMHI 对于控制矩阵值和目标>=上限的Equal Concern Error
TRANSLO ECE_CMLO和ECE_CMMID之间的过渡区
TRANSHI ECE_CMMID和ECE_CMHI之间的过渡区
控制器每次执行时,CV值由每个控制变量基于当前值、未来预测值和稳态目标计算。该CV值用于后续计算并且控制器执行时将使用Equal Concern Error。图35显示了计算Equal Concern Error的方式。注意Transition Zones(过渡区)是工程单位(亦如Equal Concern Error),并从相应的操作限制中指定增量,其中如图35所示将对ECE进行线性插值。对ECE进行倒数运算获得权重,并将其用于控制器中执行该CV。按照惯例,当ECE大于等于1,000,000时权重为0。
ECEs很大程度上给予了控制工程师控制每个CV相对于各自操作限的重要性。
通过如下设置:
ECE_CMLO= ECE_CMMID= ECE_CMHI = Constant
...恒定的ECE,CV将被当做标准权重CV对待。
如下设置:
ECE_CMLO– ECE_CMMID= ECE_CMHI= 1,000,000
...导致动作规划计算中该CV在很大程度上被忽略。
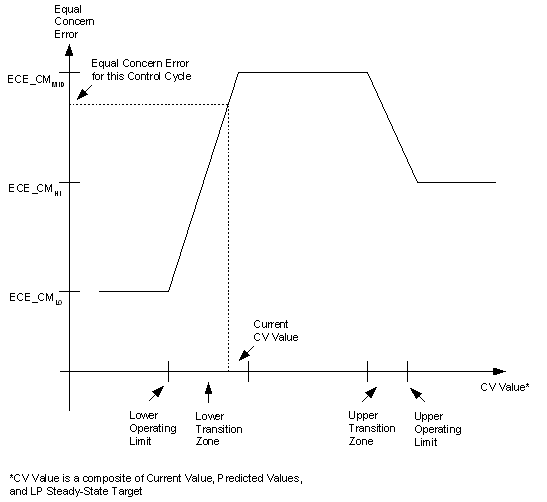
图35:Equal Concern Error简介
这种方法(动态权重)的最强大属性是降低了CV在部分范围内的重要性。通常当CV在操作限之间时会被降低重要性。即使在这种情况下,上下操作限也可能不是同等重要的。某些情况下仅有一个操作限是重要的,CV处在限制间及其它限制时被降低重要性。鉴于上下操作限重要性可能不同,软件为其分别提供了独立的ECEs。这使得稳态优化可以轻松地放弃一个不太重要的限制,而保留更重要的限制。
除了拥有动态ECEs,每个CV还有各自独立的稳态优化和动作计算的ECE。通常这两个值是相同的,但在需要时可以设置成不同。
附原文:
The DMCplus move plan uses a set of tuning parameters called Equal Concern Errors (ECEs) to weight the relative importance of control variables when calculating a move plan.
Ideally, any variable near or violating its operating limits would be dynamically controlled, while variables in the middle of their operating limits would be de-emphasized. This requires dynamic weighting.
Dynamic Matrix Control problem:
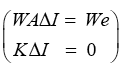
Where
A is the Dynamic Matrix
Delta I is the vector of future manipulated variables moves
e is the error vector (desired effect of control action)
K is a diagonal matrix containing the Move Suppression Factors
W is a diagonal weighting matrix obtained from Equal Concern Errors
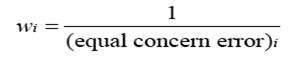
...where i is the controlled variable index.
The solution to the Dynamic Matrix Control problem is:
Dynamic Weighting
In Dynamic Weighting, the weight for each controlled variable is varied according to how near that controlled variable is to an operating limit.
Each control variable has fiveEqual Concern Errors and two Transition Zones that must be specified:
ECE_LPLO Equal Concern Error forsteady-state value and target <= Low Limit
ECE_LPHI Equal Concern Error forsteady-state value and target >= High Limit
ECE_CMLO Equal Concern Error for Control Matrix value and target <= Low Limit
ECE_CMMID Equal Concern Error for Control Matrix value and target between limits
ECE_CMHI Equal Concern Error for Control Matrix value and target >= High Limit
TRANSLO Transition between ECE_CMLO and ECE_CMMID
TRANSHI Transition between ECE_CMMID and ECE_CMHI
At each execution of the controller, a CV Value is calculated for each controlled variable based on the current value, predicted future values and steady-state target.This CV Value is used to calculate and Equal Concern Error to be used at this execution of the controller. Figure 35 shows the manner in which the Equal Concern Error is calculated. Notice that the Transition Zones are in engineering units (as are the Equal Concern Errors), and specify a delta from the corresponding operating limit in which the ECE is linearly interpolated as shown in Figure 35.A weight is obtained for the inverse of the ECE thus calculated, to be used at this execution of the controller for this CV. By convention, an ECE greater than or equal to 1,000,000 will result in a zero weight.
The ECEs provide the control engineer with considerable control over the importance attached to each controlled variable relative to its operating limits.
By setting the following:
ECE_CMLO= ECE_CMMID= ECE_CMHI = Constant
...a constant ECE results, and this CV is then treated like a Standard Weighting CV.
Setting the following:
ECE_CMLO– ECE_CMMID= ECE_CMHI= 1,000,000
...causes the CV to be largely ignored during the move plan calculation.
The most powerful attribute of this approach (Dynamic Weighting) is the ability to de-emphasize the importance of a controlled variable for certain parts of its range.Normally a controlled variable is de-emphasized when it is betweenthe operating limits. Even in this case, the operating limits may not beequally important. In other cases, only one operating limit is important and the CV is de-emphasized between the limits, and outside the other limit.Since operating limits may not have equal importance,separate steady-state ECEs were provided. This allows the steady-state optimization to easily give up on a less important limit, while not giving upon the more important limit.
In addition to having dynamic ECEs, each controlled variable has a separate ECE for the steady-state optimization and the move calculation. Normally these two values are the same,but where required, they are allowed to be different.
2015.9.26