芯片翻译之ICM20602(一)
高性能六轴MEMS运动跟踪装置
概述
ICM 20602是一个6轴运动跟踪装置,它结合了一个3轴陀螺仪,3轴加速度计,在一个小的3毫米×3毫米×0.75毫米(16引脚LGA)封装。
- 高性能规格
- 陀螺仪灵敏度误差:±1%
- 陀螺仪噪声:4 mdps/√Hz
- 加速度计噪声:100μg/√Hz
- 包括1kB FIFO以减少串行总线接口上的通信量,并通过允许系统处理器突发读取传感器数据并进入低功耗模式来降低功耗
- 支持EIS FSYNC
CM-20602包含片上16位ADC、可编程数字滤波器、嵌入式温度传感器和可编程中断。该设备的工作电压范围低至1.71V。通信端口包括I2C和10MHz的高速SPI。
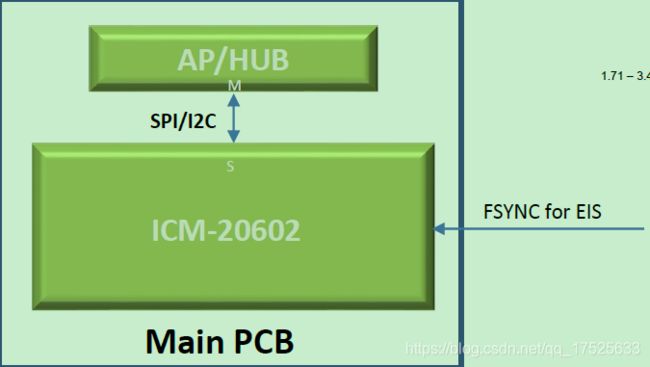
方框图
应用
- 智能手机和平板电脑
- 可穿戴传感器
- 物联网应用
- 基于运动的游戏控制器
- 互联网连接DTV和机顶盒、3D鼠标
特性
- 可编程FSR±250 dps,±500 dps,±1000 dps,±2000 dps的三轴陀螺仪
- 可编程FSR±2g,±4G,±8g,±16g的三轴加速度计
- 用户可编程中断
- 应用处理器低功耗运行的唤醒运动中断
- 1kB FIFO缓冲区使应用程序处理器能够突发式读取数据
- 片上16位ADC和可编程滤波器
- 主机接口:10 MHz SPI或400 kHz快速模式I2C
- 数字输出温度传感器
- VDD工作范围1.71V至3.45V
- 在晶圆级密封和粘合MEMS结构
- 符合RoHS和绿色标准
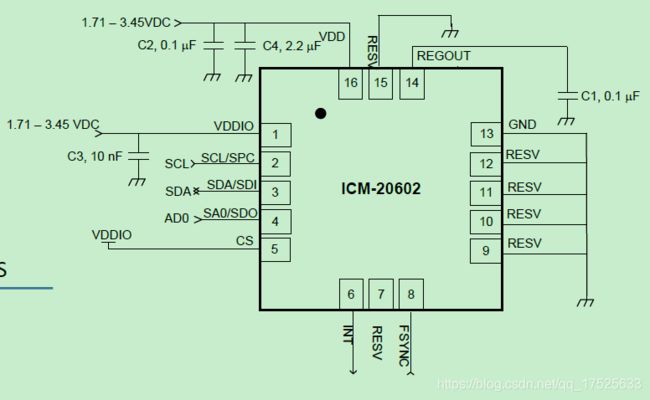
典型工作电路
介绍
1.1 目的和范围
本文档是产品规范,提供了ICM-20602™运动跟踪设备的说明、规范和设计相关信息。该设备安装在一个小的3毫米x 3毫米x 0.75毫米16针LGA封装中
1.2 产品概述
ICM 20602是一个6轴运动跟踪装置,它结合了一个3轴陀螺仪,3轴加速度计,封装规格为3毫米×3毫米×0.75毫米(16引脚LGA)。它还具有一个1kB的FIFO,可以降低串行总线接口上的通信量,并通过允许系统处理器突发读取传感器数据,然后进入低功耗模式来降低功耗。ICM 20602具有6轴集成,通过对分散原件的系统级整合,使制造商能够避免高昂成本、复杂的选择与鉴定,为消费者提供最佳的运动性能。
陀螺仪的可编程满量程为±250 dps、±500 dps、±1000 dps和±2000 dps。该加速度计有一个用户可编程的加速度计满刻度范围为±2g、±4g、±8g和±16g。两个传感器的工厂校准初始灵敏度降低了生产线校准要求。
其他的行业领先功能包括片上16位ADC、可编程数字滤波器、嵌入式温度传感器和可编程中断。该设备具有I2C和SPI串行接口、1.71V至3.45V的VDD工作范围和1.71V至3.45V的独立数字IO电源。
与设备所有寄存器的通信使用400 kHz的I2C或10 MHz的SPI执行。
InvenSense利用其获得专利并经批量验证的CMOS-MEMS制造平台,通过晶圆级键合将MEMS晶圆与配套的CMOS电子器件集成,将封装尺寸降低到3 mm x 3 mm x 0.75 mm(16针LGA)的尺寸和厚度,以提供非常小但性能高的低成本封装。该装置支持20000g的冲击可靠性,具有很高的鲁棒性。
1.3应用
- 智能手机和平板电脑
- 可穿戴传感器
2 特性
2.1 陀螺仪特性
ICM 20602中的三轴MEMS陀螺仪包括广泛的特性:
- 数字输出X,Y,Z轴角速率传感器(陀螺仪),用户可编程满量程±250 dPS,±500 dPS,±1000 dPS,±2000 dPS,集成16位ADC
- 数字可编程低通滤波器
- 低功率陀螺仪操作
- 工厂校准灵敏度比例因数
- 自我检测
2.2 加速度计特性
ICM 20602中的三轴MEMS加速度计包括广泛的特性:
- 数字输出X,Y,Z轴加速度计,可编程满量程±2g,±4G,±8g,±16g,集成16位ADC
- 用户可编程中断
- 应用处理器低功耗运行的唤醒运动中断
- 自我测试
2.3 其他特性
ICM-20602包括以下附加功能:
- 便携式设备最小和最薄的LGA封装:3 mm x 3 mm x 0.75 mm(16针LGA)
- 加速度计与陀螺仪轴之间最小交叉轴灵敏度
- 1kB FIFO缓冲区使应用程序处理器能够突发读取数据
- 数字输出温度传感器
- 用于陀螺仪、加速计和温度传感器的用户可编程数字滤波器
- 20000 g耐冲击性
- 与所有寄存器通信的400 kHz快速模式I2C
- 所有寄存器通信的10 MHz SPI串行接口
- MEMS结构在晶圆级密封和粘合
- 符合RoHS和绿色标准
3 电气规范
3.1 陀螺仪规格
默认为第4.2节中的典型工作电路,VDD=1.8V,VDDIO=1.8V,TA=25°C。

注:
- 来源于零件的验证或特性,在生产中没有保证。
- 在生产中测试。
- 由设计保证。
- 所示噪声规格适用于低噪声模式。
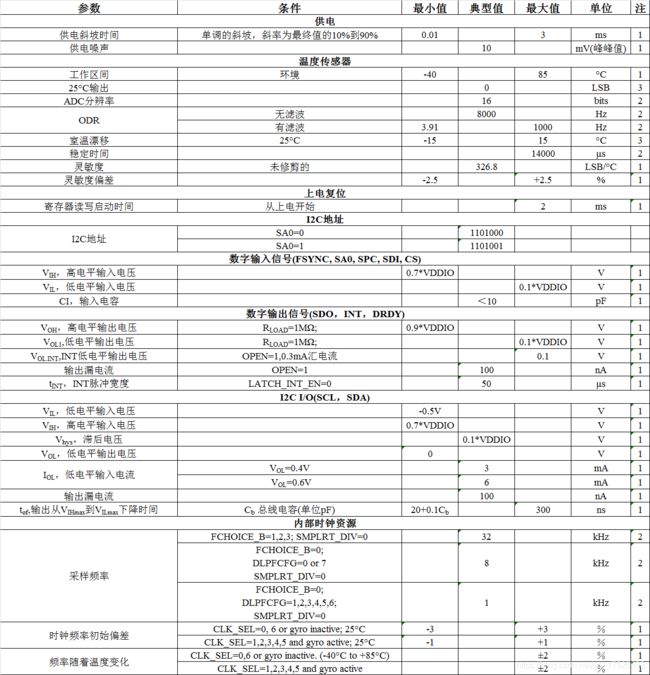
3.2 加速度计规格
默认为第4.2节中的典型工作电路,VDD=1.8V,VDDIO=1.8V,TA=25°C。

注:
- 来源于零件的验证或特性,在生产中没有保证。
- 由设计保证。
- 所示噪声规格适用于低噪声模式。
3.3 电气规格
直流电气特性
默认为第4.2节中的典型工作电路,VDD=1.8V,VDDIO=1.8V,TA=25°C。

注:
- 来源于零件的验证或特性,在生产中没有保证。
交流电气特性
默认为第4.2节中的典型工作电路,VDD=1.8V,VDDIO=1.8V,TA=25°C。
注:
- 来源于零件的验证或特性,在生产中没有保证。
- 由设计保证。
- 生产测试。
其他电气特性
默认为第4.2节中的典型工作电路,VDD=1.8V,VDDIO=1.8V,TA=25°C。

注:
- 来源于零件的验证或特性,在生产中没有保证。
- SPI时钟使用10 MHz时,占空比应在45%到55%之间。
- 最小SPI/I2C时钟速率取决于ODR。如果ODR低于4khz,则最小时钟频率为100khz。如果ODR大于4khz,则最小时钟频率为200khz。
3.4 I2C时序特性
默认为第4.2节中的典型工作电路,VDD=1.8V,VDDIO=1.8V,TA=25°C。
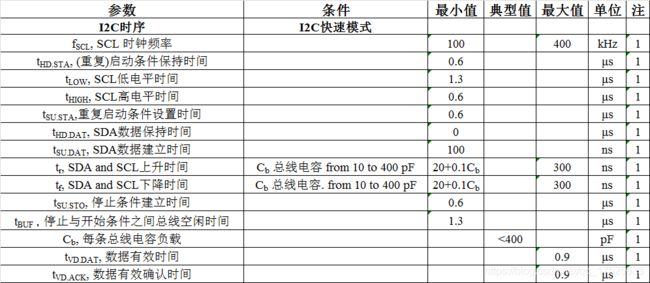
注:
- 根据安装在评估板或插座上的5个部件的过温和过电压特性

3.5 SPI时序特性
默认为第4.2节中的典型工作电路,VDD=1.8V,VDDIO=1.8V,TA=25°C。

注:
- 根据安装在评估板或插座上的5个部件的过温和过电压特性
.

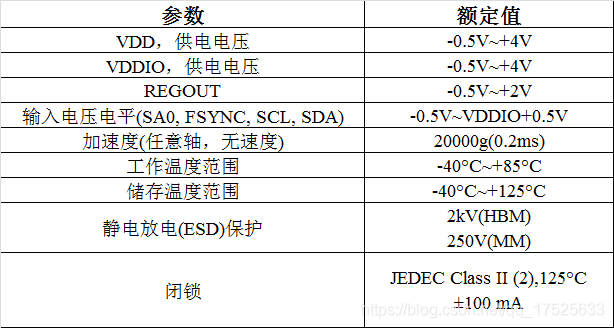
3.6 绝对最大额定值
超过“绝对最大额定值”的压力可能会对设备造成永久性损坏。这些只是应力额定值,并不意味着设备在这些条件下的功能运行。长时间的绝对最大额定值条件暴露可能影响器件可靠性。
4 应用信息
4.1 引脚输出和信号说明

注意: 不支持在SCL/SPC和CS引脚保持低位的情况下通电。如果使用这种通电方法,则在初始化之前,需要使用PWR_MGMT_1寄存器进行软件重置。

4.2 典型工作电路
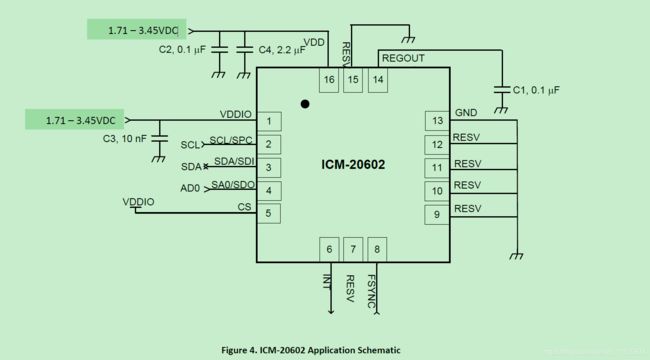
注: I2C线是开路漏极,并且需要上拉电阻(例如10 KΩ)。
4.3 外部组件材料清单
| 组件 | 标号 | 规范 | 数量 |
|---|---|---|---|
| REGOUT电容 | C1 | X7R, 0.1 μF ±10% | 1 |
| VDD旁路电容 | C2 C4 |
X7R, 0.1 μF ±10% X7R, 2.2μF ±10% |
1 1 |
| VDDIO旁路电容 | C3 | X7R, 10nF ±10% | 1 |
4.4 方框图
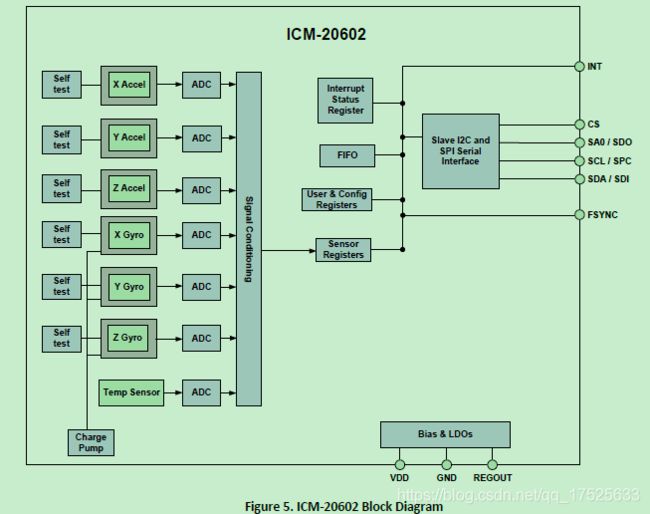
4.5概述
ICM-20602由以下关键块和功能组成:
- 16位ADCs和信号调理的三轴MEMS陀螺传感器
- 16位ADCs和信号调理的三轴MEMS加速度传感器
- I2C和SPI串行通信接口
- 自我测试
- 计时
- 传感器数据寄存器
- 队列缓存
- 中断
- 数字输出温度传感器
- Bias and LDOs
- 充油泵
- 标准电源模式
4.6 16位ADCs和信号调理的三轴MEMS陀螺传感器
ICM-20602由三个独立的振动MEMS速率陀螺仪组成,这些陀螺仪检测X、Y和Z轴的旋转。当陀螺仪绕任一感测轴旋转时,Coriolis效应会引起由电容传感器检测到的振动。产生的信号被放大、解调和滤波,以产生与角速率成比例的电压。使用单个片上16位模数转换器(ADC)对该电压进行数字化,以对每个轴进行采样。陀螺仪传感器的量程可以数字编程为每秒±250度、500度、1000度或±2000度(dps)。ADC采样率可编程,从每秒8000个采样,降低到每秒3.9个采样,可选择的低通滤波器提供广泛的截止频率。
4.7 带16位ADC和信号调节的三轴MEMS加速度计
ICM 20602的3轴加速度计在每个轴上使用单独的检测质量。沿特定轴的加速度在相应的检测质量上引起位移,电容传感器检测位移的差异。ICM-20602的结构降低了加速度计对制造变化和热漂移的敏感性。当装置放置在平坦表面上时,它将测量X轴和Y轴上的0g和Z轴上的+1g。加速度计的标度因数在工厂进行校准,标称上与电源电压无关。每个传感器都有一个专用的Σ-Δ型ADC,用于提供数字输出。数字输出的满标度范围可以调整为±2g、±4g、±8g或±16g。
4.8 I2C和SPI串行通信接口
ICM-20602使用SPI或I2C串行接口与系统处理器通信。当与系统处理器通信时,ICM-20602始终充当从机。I2C从机地址的LSB由引脚4(SA0)设置。
ICM-20602使用I2C接口的解决方案
在图6中,系统控制器为ICM-20602的I2C通信主机。

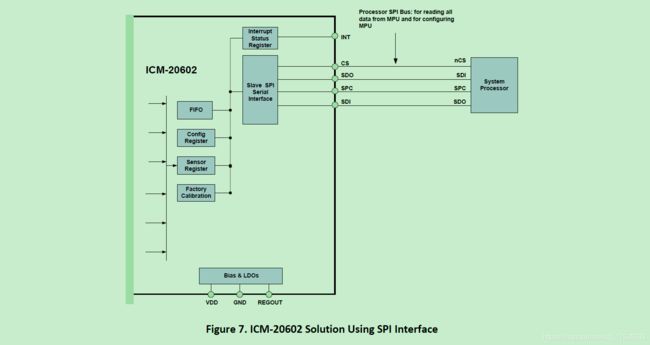
ICM-20602使用SPI接口的解决方案
在下图中,系统处理器是ICM-20602的SPI主机。引脚2、3、4和5用于支持SPI通信的SPC、SDI、SDO和CS信号。
4.9 自检
自检允许对传感器的机械和电气部分进行测试。每个测量轴的自检可以通过陀螺仪和加速度计自检寄存器(寄存器27和28)来激活。当自检启动时,电子设备会使传感器启动并产生输出信号。输出信号用于观察自检响应。自测响应定义如下:
自检响应=启用自检的传感器输出-禁用自检的传感器输出
在陀螺仪规格表中定义了每个陀螺仪轴的自测试响应,而在加速度计规格表中定义了每个加速度计轴的自测试响应。当自检响应值在产品规范规定的最小/最大限值范围内时,该零件已通过自检。当自检响应超过最小/最大值时,认为该零件自检失败。
有关自检的更多信息,请参阅本文件第8节和第9节。
4.10 计时
ICM 20602具有灵活的时钟方案,允许各种内部时钟源用于内部同步电路。这种同步电路包括信号调理和ADC,以及各种控制电路和寄存器。片上PLL电路在产生该时钟的输入方面提供了灵活的选择。
内部时钟的允许内部源包括:
a)内部张弛振荡器
b)在内部张弛振荡器和陀螺仪MEMS振荡器之间自动选择,以选择最佳可用源。
在所有模式下支持指定性能的唯一设置是选项b)。建议使用选项b)。
4.11 传感器数据寄存器
传感器数据寄存器包含最新的陀螺仪、加速计和温度测量数据。它们是只读寄存器,并通过串行接口访问。这些寄存器的数据可以随时读取。
4.12 FIFO缓存器
ICM-20602包含一个1kB的FIFO(FIFO深度1008字节)寄存器,可通过串行接口访问。FIFO配置寄存器确定哪些数据写入FIFO。可能的选择包括陀螺仪数据、加速度计数据、温度读数和FSYNC输入。FIFO计数器记录FIFO中包含的有效数据字节数。FIFO寄存器支持突发读取。中断功能可用于确定何时有新数据可用。
ICM-20602允许在低功率加速计模式下读取FIFO。包含可编程FIFO watermark,当达到watermark时触发数据准备就绪中断。
4.13 中断
中断功能通过中断配置寄存器进行配置。可配置的项包括INT和DRDY管脚配置、中断锁定和清除方法以及中断触发器。可以触发中断的项目有:(1)时钟生成器锁定到新的参考振荡器(在切换时钟源时使用);(2)可以读取新数据(从FIFO和数据寄存器);(3)加速计事件中断;(4)FIFO watermark;(5)FIFO溢出。中断状态可以从中断状态寄存器读取。
有关中断的更多信息,请参阅本文件第8节和第9节。
4.14 数字输出温度传感器
采用片上温度传感器和ADC对ICM-20602温度进行测量。ADC的读数可以从FIFO或传感器数据寄存器中读取。
4.15 BIAS 和 LDOS
BIAS和LDOS模块产生ICM-20602所需的内部电源和参考电压和电流。它的两个输入是一个未经调节的VDD和一个VDDIO逻辑参考电源电压。LDO输出在REGOUT被一个电容器旁路。有关电容器的详细信息,请参阅外部组件的材料清单。
4.16 电荷泵
片上电荷泵产生MEMS振荡器所需的高电压。
4.17 标准电源模式-更新电源模式
下表列出了ICM-20602的用户可访问电源模式。
| 模式 | 名称 | 陀螺仪 | 加速度计 |
|---|---|---|---|
| 1 | 睡眠模式 | 关闭 | 关闭 |
| 2 | 待机模式 | 驱动 | 关闭 |
| 3 | 加速度计低功率模式 | 关闭 | 占空比 |
| 4 | 加速度计低噪声模式 | 关闭 | 打开 |
| 5 | 陀螺仪低功率模式 | 占空比 | 关闭 |
| 6 | 陀螺仪低噪声模式 | 打开 | 关闭 |
| 7 | 6轴低噪声模式 | 打开 | 打开 |
| 8 | 6轴低功率模式 | 占空比 | 打开 |
注: 各模式的功耗见第0节
剩下内容见博客:<芯片翻译之ICM20602(二)>