STM32 --- 舵机使用笔记(含角度控制代码)
一 、舵机概述
上周,抽个闲做枪手,给群友写了一份两路舵机的控制代码。感谢老铁的信任,方案双方都很满意。
代码测试时,用的两款180°舵机:MG996R 和 MG995 。

1、舵机的分类
- 按旋转角度
180°舵机:能给定角度、固定转速。 只能在0度到180度之间运动,超过范围,舵机轻则齿轮打坏,重则烧坏内部电路.
360°舵机:能360度转动, 能控制转速。但不能调节转动的角度。
- 按控制信号
模拟舵机:要持续提供PWM信号才能固定角度。优点:便宜。
数字舵机:只要给一次PWM信号就能固定角度。优点:高精度,响就快,抖动小,更大的角度固定力。
2、几个重要参数
- 最大扭矩:如上面的MG996, 最大扭矩: 13KG/cm. 这个是在舵机堵转时测得的, 其时距离轴中心1cm处能挂起的重量.
- 工作电压:如常用的3.0V~7.2V, 接入电压不同, 所能产生的工作扭矩自然不同. 直接影响角度固定力。
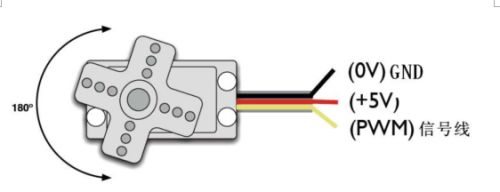
3、引脚接线说明
-
红色:供电;电流比较大,除非测试, 真不建议在开发板上取电;
-
粽色:地线;必须与控制器, 如SMT32芯片共地;
-
橙色:PWM信号线;接芯片的TIMx外设的CHx脚;
二、舵机控制原理
以本次测试的180度模拟舵机为例进行笔记讲解。
1、原理简述
舵机接收的是PWM信号,能使舵机内部电路产生一个偏置电压,触发电机通过减速齿轮带动电位器移动,当电压差为零时,电机停转,从而达到伺服的效果。
即,给舵机提供一个特定的PWM信号,舵机就可以旋转到指定的位置。
2、PWM信号、角度
舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms-2.5ms之间时舵机就可以对应旋转到不同的角度。
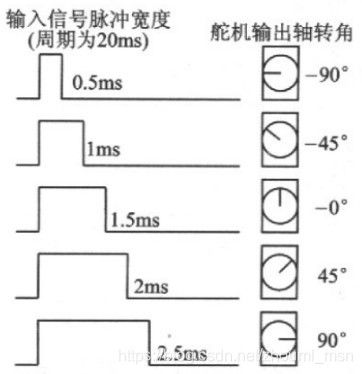
为了更好地理解其信号,和编写代码,把PWM关键点转换如下:
- PWM信号周期: 20000us
- 0度时,高电平时长: 500us
- 180度时, 高电平时长:2500us
- 每增加1 °,需增加高电平时长:(2500-500)÷180 = 11.1us
- 某角度值A,需要的总高电平时长:(A x11.1 +500)us
特别地说明: 把所有ms值, 转换为us值, 是为了方便代码的编写和理解.
三、STM32代码实现
工程代码: STM32F103RC + 标准库函数v3.5;
1、所用引脚的宏定义
/*****************************************************************************
** 移植配置
****************************************************************************/
// 舵机_1
#define SERVO_1_GPIO GPIOB // GPIO
#define SERVO_1_PIN GPIO_Pin_8 // PIN
#define SERVO_1_TIM_PORT TIM4 // 定时器: TIMx
#define SERVO_1_TIM_CH 3 // 通道: CHx
#define SERVO_1_ANGLE_RESET 90 // 上电复位后的角度
// 时基配置, 适用20ms周期的舵机
#define SERVO_TIM_PSC 72 // 计数器时钟=72000000/72=1000000次/秒=1us/次
#define SERVO_TIM_ARR 20000 // 周期=20000*1us=20ms
为了加大代码移植的方便,取消时钟的宏定义,在初始化函数里根据所用端口做判断后使能各时钟.
2、GPIO初始化
// GPIO配置
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = PINx;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOx, &GPIO_InitStructure);引脚配置要点:复用推挽模式(GPIO_Mode_AF_PP);
2、TIM初始化
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// TIM时基配置
TIM_TimeBaseStructure.TIM_Prescaler= (psc-1); // 驱动CNT计数器的时钟 = Fck_int/(psc+1)
TIM_TimeBaseStructure.TIM_Period= (arr-1); // 自动重装载寄存器的值,累计TIM_Period+1个频率后产生一个更新或者中断
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1; // 时钟分频因子 ,用于配置死区时间,没用到,随意
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; // 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_RepetitionCounter=0; // 重复计数器的值,没用到,可以随意设置
TIM_TimeBaseInit(TIMx, &TIM_TimeBaseStructure); // 初始化定时器
// 输出比较模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; // 配置为PWM模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 输出使能
TIM_OCInitStructure.TIM_Pulse = ccr; // 设置占空比大小
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; // 输出通道电平极性配置
if(CHx==1) TIM_OC1Init(TIMx, &TIM_OCInitStructure);
if(CHx==2) TIM_OC2Init(TIMx, &TIM_OCInitStructure);
if(CHx==3) TIM_OC3Init(TIMx, &TIM_OCInitStructure);
if(CHx==4) TIM_OC4Init(TIMx, &TIM_OCInitStructure);
// CCR预装载
if(CHx==1) TIM_OC1PreloadConfig(TIMx, TIM_OCPreload_Enable);
if(CHx==2) TIM_OC1PreloadConfig(TIMx, TIM_OCPreload_Enable);
if(CHx==3) TIM_OC1PreloadConfig(TIMx, TIM_OCPreload_Enable);
if(CHx==4) TIM_OC1PreloadConfig(TIMx, TIM_OCPreload_Enable);
TIM_Cmd(TIMx, ENABLE); // 使能计数器
//TIM_CtrlPWMOutputs(TIMx, ENABLE); // 主输出使能,当使用的是通用定时器时,这句不需要 如果没有这几行 if 语句,代码简洁。
使用这些 if 进行判断的原因, 是因为我想把PWM的初始化函数, 做成更容易复用的代码, 这样以后要初始化某个TIM做PWM输出, 那只要传入相应的参数即可:
void TIM_PwmInit(GPIO_TypeDef* GPIOx, u16 PINx, TIM_TypeDef* TIMx, u8 CHx, u16 PSC, u16 ARR, u16 CCR);上面的TIM初始化,是经这个函数传入参数的。
重点解释一下:PSC, ARR, CCR, CNT
- PSC:TIM时钟的分频系数:72;内部时钟经PSC值分频后, 传给CNT计数器使用;
- CNT:计数器,CNT每计数一次的脉冲时长为:1÷(CLK÷PSC) = 1÷(72000000÷72) = 0.000001s/次 = 1us/次;
- ARR:自动重装载值:20000,CNT计数器经过多少次脉冲就重新开始计数。用这个值可控制需要的PWM信号周期:1us x 20000次 = 20 000us = 20ms
- CCR:用于控制周期内高电平时长, 当CNT
3、角度输出函数
// 舵机1#配置角度
// 【可选参数】 [angle]0.0°~180.0°;
void AnalogServo_1_Angle(float angle)
{
u16 ccr_1=0;
xServo.angleNow_1 = angle;
if(xServo.angleNow_1>180) xServo.angleNow_1 =180; // 限制最大值, 防止出错
if(xServo.angleNow_1< 0) xServo.angleNow_1 =2; // 限制最小值, 防止出错
ccr_1 = xServo.angleNow_1*11.11 +500; // 把角度值, 换算成CCR值
TIM_SetCCR(SERVO_1_TIM_PORT, SERVO_1_TIM_CH, ccr_1); // 配置TIMx的CCR寄存器值
}
// 控制TIMx的CCRx的值;【可选参数】 [TIMx]TIM1~8, [CHx]1~4, [CCR]0~65535;
void TIM_SetCCR(TIM_TypeDef* TIMx, u8 CHx, u16 CCR)
{
if(CHx==1) TIMx->CCR1 = CCR;
if(CHx==2) TIMx->CCR2 = CCR;
if(CHx==3) TIMx->CCR3 = CCR;
if(CHx==4) TIMx->CCR4 = CCR;
}哈,自己有个死穴,不管学习某个方面的知识时,理解得有多深刻,过一段时间后,总是会淡忘得一干二净的。
所以,这个代码做成调用时,直接传入角度即可,以后就不用回忆高电平与角度的关系了。
四、完整代码下载
工程所用STM32F103RC的核心版,完整代码,已分到CSDN的资料库。
完整代码下载: STM32_舵机PWM控制代码.zip
同时也分享了一份Q群 887199504 的文件夹,可自由下载的。