超声波避障
``1.超声波测距原理
超声波是一种频率比较高的声音,指向性强 ,超声波测距的原理是利用超声波在空气中的传播速度为已知, 测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。
测距的公式表示为:L=CxT,L是测量距离的长度,C为超声波在空气中的传播速度,T是测量距离传播的时间差,也就是发射到接受时间数值的一半。
2.超声波在智能小车中的安装效果图
3.HC-SR04产品特点
(1)典型工作用电压:5v
(2)超小静态工作电流:小于2mA
(3)感应角度:不大于十五度
(4)探测距离:2cm~400cm
(5)高精度可达0.3cm
(6)盲区(2cm)超近
4.HC-SR04接口定义
Vcc,Gnd,Trig(控制端),Echo(接收端)。
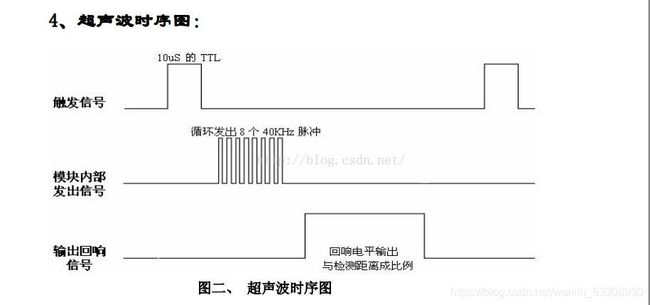
控制端和接收端和单片机引脚相连。控制口发一个10us以上的高电平,就可以在接收口 等待高电平输出,一有输出就可以开定时器计时,当此口变为低电平时,就可以读定时器的值,此时就为此次测距的时间。方可算出距离。如此不断地周期测, 就可以达到移动测量的值了。
5.超声波时序图
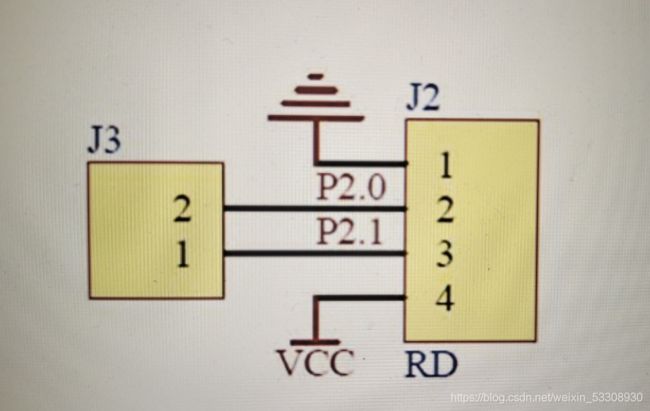
6.智能小车超声波模块io口
采用51单片机的p2.0,p2.1连接控制超声波模块, 其中p2.0为Echo,p2.1为Trig
7代码测试
`#include
#define STOP 0
#define FORWARD 1
#define BACKWARD 2
#define TURNLEFT 3
#define TURNRIGHT 4
int leftMotor1 = 16;
int leftMotor2 = 17;
int rightMotor1 = 18;
int rightMotor2 = 19;
int leftPWM = 5;
int rightPWM = 6;
Servo myServo; //舵机
int inputPin=7; // 定义超声波信号接收接口
int outputPin=8; // 定义超声波信号发出接口
void setup() {
// put your setup code here, to run once:
//串口初始化
Serial.begin(9600);
//舵机引脚初始化
myServo.attach(9);
//测速引脚初始化
pinMode(leftMotor1, OUTPUT);
pinMode(leftMotor2, OUTPUT);
pinMode(rightMotor1, OUTPUT);
pinMode(rightMotor2, OUTPUT);
pinMode(leftPWM, OUTPUT);
pinMode(rightPWM, OUTPUT);
//超声波控制引脚初始化
pinMode(inputPin, INPUT);
pinMode(outputPin, OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
avoidance();
}
void motorRun(int cmd,int value)
{
analogWrite(leftPWM, value); //设置PWM输出,即设置速度
analogWrite(rightPWM, value);
switch(cmd){
case FORWARD:
Serial.println(“FORWARD”); //输出状态
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
break;
case BACKWARD:
Serial.println(“BACKWARD”); //输出状态
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, HIGH);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
break;
case TURNLEFT:
Serial.println(“TURN LEFT”); //输出状态
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
break;
case TURNRIGHT:
Serial.println(“TURN RIGHT”); //输出状态
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, HIGH);
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
break;
default:
Serial.println(“STOP”); //输出状态
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, LOW);
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, LOW);
}
}
void avoidance()
{
int pos;
int dis[3];//距离
motorRun(FORWARD,200);
myServo.write(90);
dis[1]=getDistance(); //中间
if(dis[1]<30)
{
motorRun(STOP,0);
for (pos = 90; pos <= 150; pos += 1)
{
myServo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
dis[2]=getDistance(); //左边
for (pos = 150; pos >= 30; pos -= 1)
{
myServo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
if(pos==90)
dis[1]=getDistance(); //中间
}
dis[0]=getDistance(); //右边
for (pos = 30; pos <= 90; pos += 1)
{
myServo.write(pos); // tell servo to go to position in variable ‘pos’
delay(15); // waits 15ms for the servo to reach the position
}
if(dis[0]
//左转
motorRun(TURNLEFT,250);
delay(500);
}
else //右边距离障碍的距离比左边远
{
//右转
motorRun(TURNRIGHT,250);
delay(500);
}
}
}
int getDistance()
{
digitalWrite(outputPin, LOW); // 使发出发出超声波信号接口低电平2μs
delayMicroseconds(2);
digitalWrite(outputPin, HIGH); // 使发出发出超声波信号接口高电平10μs,这里是至少10μs
delayMicroseconds(10);
digitalWrite(outputPin, LOW); // 保持发出超声波信号接口低电平
int distance = pulseIn(inputPin, HIGH); // 读出脉冲时间
distance= distance/58; // 将脉冲时间转化为距离(单位:厘米)
Serial.println(distance); //输出距离值
if (distance >=50)
{
//如果距离小于50厘米返回数据
return 50;
}//如果距离小于50厘米小灯熄灭
else
return distance;
}`
8.智能小车避障解释
小车前进过程中只检测前方距离障碍的距离, 并且控制多机保持超声波模块位于正前方 ,当检测到小车前方距离障碍小于30cm时停车检测两边距离 。控制多机每次运动一个周期后都返回正前方位置。由于舵机运动需要一定的时间,因此在每转过一个角度的时候都延时 delay(15)供其运动 。当运动到最左边时,检测小车左边距离障碍的距离,然后向右边运动,检测右边距离 。将前边左边,右边距离障碍的都检测结束之后,舵机回到最初位置 。