lenet5卷积神经网络_PyTorch:卷积神经网络简介
本文主要研究了LeNet-5网络结构。
卷积神经网络是由一个或多个卷积层和顶端的全连接层(也可以使用1x1的卷积层作为最终的输出)组成一种前馈神经网络。一般的认为,卷积神经网络是由Yann LeCun在1989年提出的LeNet中首先被使用,但是由于当时的计算能力不够,并没有得到广泛的应用,到了1998年Yann LeCun及其合作者构建了更加完备的卷积神经网络LeNet-5并在手写数字的识别问题中取得成功,LeNet-5的成功使卷积神经网络的应用得到关注。LeNet-5沿用了LeCun (1989) 的学习策略并在原有设计中加入了池化层对输入特征进行筛选 。LeNet-5基本上定义了现代卷积神经网络的基本结构,其构筑中交替出现的卷积层-池化层被认为有效提取了输入图像的平移不变特征,使得对于特征的提取前进了一大步,所以我们一般的认为,Yann LeCun是卷积神经网络的创始人。
2006年后,随着深度学习理论的完善,尤其是计算能力的提升和参数微调(fine-tuning)等技术的出现,卷积神经网络开始快速发展,在结构上不断加深,各类学习和优化理论得到引入,2012年的AlexNet、2014年的VGGNet、GoogLeNet 和2015年的ResNet,使得卷积神经网络几乎成为了深度学习中图像处理方面的标配。
1. 卷积神经网络结构组成
1.1 卷积层
卷积计算
在介绍卷积层之前要先介绍一下卷积的计算,这里引用知乎上的一张图片:
我们会定义一个权重矩阵,也就是我们说的W(一般对于卷积来说,称作卷积的核kernel也有有人称做过滤器filter),这个权重矩阵的大小一般为3*3或者5*5,但是在LeNet里面还用到了比较大的7*7,现在已经很少见了,因为根据经验的验证,3和5是最佳的大小。 我们以图上所示的方式,我们在输入矩阵上使用我们的权重矩阵进行滑动,每滑动一步,将所覆盖的值与矩阵对应的值相乘,并将结果求和并作为输出矩阵的一项,依次类推直到全部计算完成。
上图所示,我们输入是一个5*5的矩阵,通过使用一次3*3的卷积核计算得到的计算结果是一个3*3的新矩阵。 那么新矩阵的大小是如何计算的呢?
卷积核大小 f:刚才已经说到了一个重要的参数,就是核的大小,我们这里用f来表示。
边界填充 (p)adding:我们看到上图,经过计算后矩阵的大小改变了,如果要使矩阵大小不改变呢,我们可以先对矩阵做一个填充,将矩阵的周围全部再包围一层,这个矩阵就变成了7*7,上下左右各加1,相当于5+1+1=7这时,计算的结果还是5*5的矩阵,保证了大小不变,这里的p=1。
步长 (s)tride:从动图上我们能够看到,每次滑动只是滑动了一个距离,如果每次滑动两个距离呢?那就需要使用步长这个参数。
计算公式:n为我们输入的矩阵的大小,
卷积层:在每一个卷积层中我们都会设置多个核,每个核代表着不同的特征,这些特征就是我们需要传递到下一层的输出,而我们训练的过程就是训练这些不同的核。
1.2 激活函数
由于卷积的操作也是线性的,所以也需要进行激活,一般情况下,都会使用relu。
1.3 池化层(pooling)
池化层是CNN的重要组成部分,通过减少卷积层之间的连接,降低运算复杂程度,池化层的操作很简单,就想相当于是合并,我们输入一个过滤器的大小,与卷积的操作一样,也是一步一步滑动,但是过滤器覆盖的区域进行合并,只保留一个值。 合并的方式也有很多种,例如我们常用的两种取最大值maxpooling,取平均值avgpooling。
池化层的输出大小公式也与卷积层一样,由于没有进行填充,所以p=0,可以简化为
1.4 dropout层
dropout是2014年 Hinton 提出防止过拟合而采用的方法,增强了模型的泛化能力 Dropout(随机失活)是指在深度学习网络的训练过程中,按照一定的概率将一部分神经网络单元暂时从网络中丢弃,相当于从原始的网络中找到一个更瘦的网络,说的通俗一点,就是随机将一部分网络的传播掐断,听起来好像不靠谱,但是通过实际测试效果非常好。 有兴趣的可以去看一下原文Dropout: A Simple Way to Prevent Neural Networks from Overfitting。
1.5 全连接层
全连接层一般是作为最后的输出层使用,卷积的作用是提取图像的特征,最后的全连接层就是要通过这些特征来进行计算,输出我们所要的结果了,无论是分类,还是回归。
我们的特征都是使用矩阵表示的,所以再传入全连接层之前还需要对特征进行压扁,将他这些特征变成一维的向量,如果要进行分类的话,就是用sofmax作为输出,如果要是回归的话就直接使用linear即可。
2. 经典模型
2.1 LeNet-5
1998, Yann LeCun 的 LeNet5 官网。
卷积神经网路的开山之作,麻雀虽小,但五脏俱全,卷积层、pooling层、全连接层,这些都是现代CNN网络的基本组件。
- 用卷积提取空间特征;
- 由空间平均得到子样本;
- 用 tanh 或 sigmoid 得到非线性;
- 用 multi-layer neural network作为最终分类器;
- 层层之间用稀疏的连接矩阵,以避免大的计算成本。
其网络结构如下:
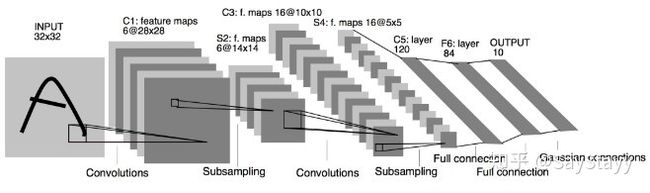
- C1层是一个卷积层,有6个卷积核(提取6种局部特征),核大小为5 * 5
- S2层是pooling层,下采样(区域:2 * 2 )降低网络训练参数及模型的过拟合程度。
- C3层是第二个卷积层,使用16个卷积核,核大小:5 * 5 提取特征
- S4层也是一个pooling层,区域:2*2
- C5层是最后一个卷积层,卷积核大小:5 * 5 卷积核种类:120
- 最后使用全连接层,将C5的120个特征进行分类,最后输出0-9的概率
输入:图像Size为32*32。这要比mnist数据库中最大的字母(28*28)还大。这样做的目的是希望潜在的明显特征,如笔画断续、角点能够出现在最高层特征监测子感受野的中心。
输出:10个类别,分别为0-9数字的概率。
以下代码来自PyTorch官方教程,为了便于理解,我打印了每步网络结构的尺寸。
import torch
import torch.nn as nn
import torch.nn.functional as F
class LeNet5(nn.Module):
def __init__(self):
super(LeNet5, self).__init__()
# 1 input image channel, 6 output channels, 5x5 square convolution
# kernel
self.conv1 = nn.Conv2d(1, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
# an affine operation: y = Wx + b
self.fc1 = nn.Linear(16 * 5 * 5, 120) # 这里论文上写的是conv,官方教程用了线性层
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
print(x.size())
x = self.conv1(x)
x = F.relu(x)
print(x.size())
# Max pooling over a (2, 2) window
x = F.max_pool2d(x, (2, 2))
print(x.size())
x = self.conv2(x)
x = F.relu(x)
print(x.size())
x = F.max_pool2d(x, (2,2))
print(x.size())
x = x.view(-1, self.num_flat_features(x))
print(x.size())
x = F.relu(self.fc1(x))
print(x.size())
x = F.relu(self.fc2(x))
print(x.size())
x = self.fc3(x)
print(x.size())
return x
def num_flat_features(self, x):
size = x.size()[1:] # all dimensions except the batch dimension,因为x是一个四维张量,[batch, channel, height, width]
num_features = 1
for s in size:
num_features *= s
return num_features
net = LeNet5()
print(net)LeNet5(
(conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
(fc1): Linear(in_features=400, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=10, bias=True)
)
# net.named_parameters可同时返回可学习的参数及名称
for name, parameters in net.named_parameters():
print(name, ':', parameters.size())conv1.weight : torch.Size([6, 1, 5, 5])
conv1.bias : torch.Size([6])
conv2.weight : torch.Size([16, 6, 5, 5])
conv2.bias : torch.Size([16])
fc1.weight : torch.Size([120, 400])
fc1.bias : torch.Size([120])
fc2.weight : torch.Size([84, 120])
fc2.bias : torch.Size([84])
fc3.weight : torch.Size([10, 84])
fc3.bias : torch.Size([10])
然后打印每层网络输出的大小:
input = torch.randn(1, 1, 32, 32) # 这里的对应前面forward的输入是32
out = net(input)torch.Size([1, 1, 32, 32])
torch.Size([1, 6, 28, 28])
torch.Size([1, 6, 14, 14])
torch.Size([1, 16, 10, 10])
torch.Size([1, 16, 5, 5])
torch.Size([1, 400])
torch.Size([1, 120])
torch.Size([1, 84])
torch.Size([1, 10])
2.2 AlexNet
2012,Alex Krizhevsky 可以算作LeNet的一个更深和更广的版本,可以用来学习更复杂的对象论文。
- 用rectified linear units(ReLU)得到非线性;
- 使用 dropout 技巧在训练期间有选择性地忽略单个神经元,来减缓模型的过拟合;
- 重叠最大池,避免平均池的平均效果;
- 使用 GPU NVIDIA GTX 580 可以减少训练时间,这比用CPU处理快了 10 倍,所以可以被用于更大的数据集和图像上
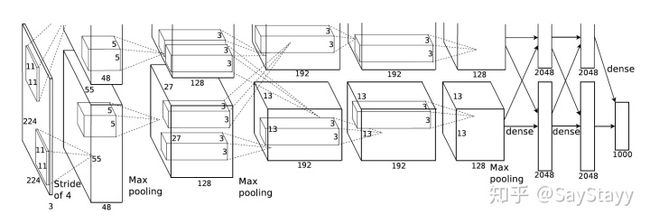
虽然 AlexNet只有8层,但是它有60M以上的参数总量,Alexnet有一个特殊的计算层,LRN层,做的事是对当前层的输出结果做平滑处理,这里就不做详细介绍了, Alexnet的每一阶段(含一次卷积主要计算的算作一层)可以分为8层:
- conv - relu - pooling - LRN : 要注意的是input层是227*227,而不是paper里面的224,这里可以算一下,主要是227可以整除后面的conv1计算,224不整除。如果一定要用224可以通过自动补边实现,不过在input就补边感觉没有意义,补得也是0,这就是我们上面说的公式的重要性。
- conv - relu - pool - LRN : group=2,这个属性强行把前面结果的feature map分开,卷积部分分成两部分做
- conv - relu
- conv-relu
- conv - relu - pool
- fc - relu - dropout : dropout层,在alexnet中是说在训练的以1/2概率使得隐藏层的某些neuron的输出为0,这样就丢到了一半节点的输出,BP的时候也不更新这些节点,防止过拟合。
- fc - relu - dropout
- fc - softmax
在Pytorch的vision包中是包含Alexnet的官方实现的,我们直接使用官方版本看下网络:
import torchvision
model = torchvision.models.alexnet(pretrained=False) #我们不下载预训练权重
print(model)AlexNet(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(11, 11), stride=(4, 4), padding=(2, 2))
(1): ReLU(inplace=True)
(2): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(3): Conv2d(64, 192, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(4): ReLU(inplace=True)
(5): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
(6): Conv2d(192, 384, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(7): ReLU(inplace=True)
(8): Conv2d(384, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): ReLU(inplace=True)
(10): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): MaxPool2d(kernel_size=3, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(6, 6))
(classifier): Sequential(
(0): Dropout(p=0.5, inplace=False)
(1): Linear(in_features=9216, out_features=4096, bias=True)
(2): ReLU(inplace=True)
(3): Dropout(p=0.5, inplace=False)
(4): Linear(in_features=4096, out_features=4096, bias=True)
(5): ReLU(inplace=True)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)
此外,还有其他流行的网络结构,比如VGG、GooLeNet、ResNet,学到再仔细介绍。