【数字图像处理】Canny边缘检测C语言实现
文章目录
- (一)边缘检测步骤
-
- 1. 彩色图像转换为灰度图像
- 2. 对图像进行高斯模糊
- 3. 计算图像梯度,根据梯度计算图像边缘幅值与角度(这里其实用到了微分边缘检测算子来计算梯度幅值方向)
- 4. 非最大信号压制处理(边缘细化)
- 5. 双阈值边缘连接处理
- 6. 二值化图像输出结果
- (二)图像的梯度与方向角计算
-
- (1)sobel算子
- (2) Prewitt算子
- (3) Robert算子
- (4)三种算子效果比较
- (三)非极大值抑制
- (四)图像双阈值化与边缘连接
- (五)代码实现
-
- li_canny.c
- main.c
- (六)写在后面
(一)边缘检测步骤
对于边缘检测我们通常需要完成的事情有:
1. 彩色图像转换为灰度图像
2. 对图像进行高斯模糊
3. 计算图像梯度,根据梯度计算图像边缘幅值与角度(这里其实用到了微分边缘检测算子来计算梯度幅值方向)
4. 非最大信号压制处理(边缘细化)
5. 双阈值边缘连接处理
6. 二值化图像输出结果
(二)图像的梯度与方向角计算
边缘检测的第一步就是计算图像的梯度与方向角。并在此基础上计算出每一个在X,Y方向梯度确定的情况下的幅值。
图像梯度是指图像某像素在x和y两个方向上的变化率(与相邻像素比较),是一个二维向量,由2个分量组成,X轴的变化、Y轴的变化 。
其中X轴的变化是指当前像素右侧(X加1)的像素值减去当前像素左侧(X减1)的像素值。
同理,Y轴的变化是当前像素下方(Y加1)的像素值减去当前像素上方(Y减1)的像素值。
计算出来这2个分量,形成一个二维向量,就得到了该像素的图像梯度。取反正切arctan,可得到梯度角度。
这个求图像梯度的过程可以通过一个卷积核来实现:以[-1,0,1]为例



图像梯度的绝对值为

图像梯度的角度为
![]()
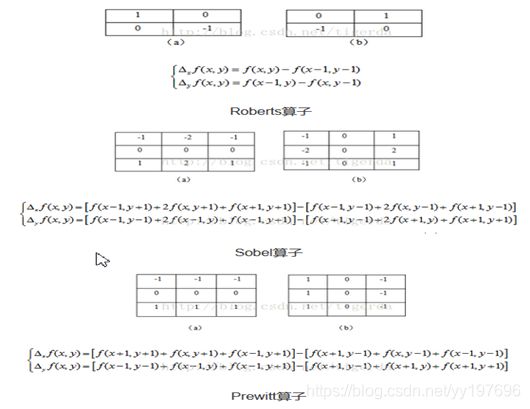
在此基础上图像处理的专家们又研究出了多种可以计算梯度的算子。常见边缘检测算子:Roberts 、Sobel 、Prewitt、Laplacian、Log/Marr、Canny、Kirsch、Nevitia。这里我们以Roberts 、Sobel 、Prewitt来分别实现。图像的梯度运算。
Robert算子是第一个边缘检测算子,提出者Lawrence Roberts in 1963。
Sobel边缘算子,当年作者并没有公开发表过论文,仅仅是在一次博士生课题讨论会(1968)上提出(“A 3x3 Isotropic Gradient Operator for Image Processing”),后在1973年出版的一本专著(“Pattern Classification and Scene Analysis”)的脚注里作为注释出现和公开的。提出者Irwin Sobel。
Prewitt算子来自J.M.S. Prewitt “Object Enhancement and Extraction” in “Picture processing and Psychopictorics”, Academic Press,1970。
我们看这三种边缘检测算子模板及写成差分的形式:
 根据以上公式可以确定梯度与角度的计算方式,下面以sobel算子为例:
根据以上公式可以确定梯度与角度的计算方式,下面以sobel算子为例:
33 Sobel两个方向的算子在图像上滑动,模板与其覆盖的图像33区域9个像素进行卷积,求和后得到此方向的边缘检测幅值。
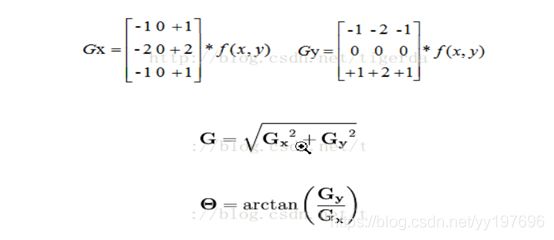
f(x,y)为图像,Gx和Gy分别是水平和竖直方向算子的卷积结果,G则是最终得到的边缘幅值,θ值则是边缘方向。
下面我们来这常见的几种卷积核进行比较(example/canny/canny.c):
(1)sobel算子

(2) Prewitt算子
(3) Robert算子

(4)三种算子效果比较
Roberts算子 对具有陡峭低噪声的图像处理效果很好,但是利用Roberts算子提取边缘的结果比较粗,因此对于边缘的定位不会非常准确。
Sobel 算子 对灰度渐变和噪声较多的图像处理效果比较好,Sobel算子对边缘定位比较准确。
Prewitt算子 对灰度渐变和噪声较多的图像处理效果较好
综上我们选择Sobel算子作为我们的梯度运算方法。
(三)非极大值抑制
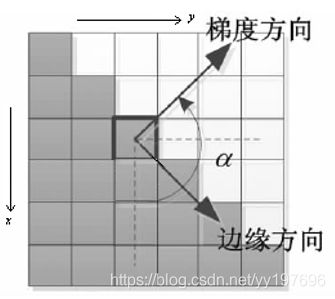
canny算子中非最大抑制(Non-maximum suppression)是回答这样一个问题: “当前的梯度值在梯度方向上是一个局部最大值吗?” 所以,要把当前位置的梯度值与梯度方向上两侧的梯度值进行比较。
非极大值抑制可以帮助抑制除局部最大值之外的所有梯度值(通过将它们设置为0) ,使其指示具有最强烈的强度值变化的位置。以目标检测为例,目标检测的过程中在同一目标的位置上会产生大量的候选框,这些候选框相互之间可能会有重叠,此时我们需要利用非极大值抑制找到最佳的目标边界框,消除冗余的边界框。
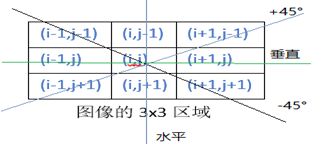
在John Canny提出的Canny算子的论文中,非最大值抑制就只是在0、90、45、135四个梯度方向上进行的,每个像素点梯度方向按照相近程度用这四个方向来代替。这种情况下,非最大值抑制所比较的相邻两个像素就是:
1) 0:左边 和 右边
2)45:右上 和 左下
3)90: 上边 和 下边
4)135: 左上 和 右下

这样做的好处是简单, 但是这种简化的方法无法达到最好的效果, 因为,自然图像中的边缘梯度方向不一定是沿着这四个方向的。因此,就有很大的必要进行插值,找出在一个像素点上最能吻合其所在梯度方向的两侧的像素值。
然而,实际数字图像中的像素点是离散的二维矩阵,所以处在真正中心位置C处的梯度方向两侧的点是不一定存在的,或者说是一个亚像素(sub pixel)点,而这个不存在的点, 以及这个点的梯度值就必须通过对其两侧的点进行插值来得到。
步骤:
- 对角度在四个方向进行划分,形成新的角度图;
- 根据角度图(表征着梯度的方向),对幅值进行非极大值抑制。
以3X3图像为例,按下图进行比较。
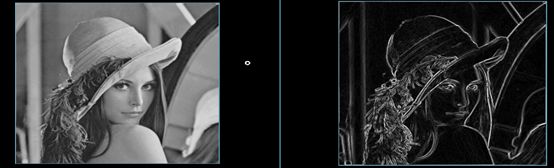
非极大值抑制效果:

图表 13 非极大值抑制
可以看到大量的非边缘点被过滤掉了。
(四)图像双阈值化与边缘连接
对于一些图像有很强的分界特征,我们可以考虑用双阈值法进行二值化操作。
双阈值化思想:
- 首先要确定的是该方法同样也是对灰度图进行操作。
- 然后,我们预设两个特定的阈值量thresh1、thresh2,并且thresh1 < thresh2 。
- 阈值化的过程就是,将在 (thresh1,thresh2) 这个区间内的灰度值设置为maxVal,将其余部分设置为0
双阈值化操作中的两个预设阈值量根据实际需要自行设置,需要说明的是,maxVal可以是某一个固定值(通常情况下8位无符号图像设置为最大灰度值255)。
双阈值化类型如下式所示:

在3.3.2中已经完成了很大一部分点的过滤,但是含有很多的弱边缘点就是说他们的幅值达不到要求,这个时候我们就需要想办法过滤掉这些幅值达不到要求的点。
步骤:
• 选取高阈值 T H 和 低 阈 值 T L , 比 率 为 2 : 1 或 3 : 1 。 ( 一 般 取 T H = 0.3 / 0.2 , T L = 0.1 T_H和低阈值T_L,比率为2:1或3:1。(一般取T_H=0.3/0.2,T_L=0.1 TH和低阈值TL,比率为2:1或3:1。(一般取TH=0.3/0.2,TL=0.1)
• 取出非极大值抑制后的图像中的最大梯度幅值,重新定义高低阈值。即: T H × M a x , T L × M a x T_H\times{Max},T_L\times{Max} TH×Max,TL×Max。(当然可以自己给定)
• 将 小 于 T L 的 点 抛 弃 , 赋 0 ; 将 大 于 T H 的 点 立 即 标 记 ( 这 些 点 就 是 边 缘 点 ) , 赋 1 。 将小于T_L的点抛弃,赋0;将大于T_H的点立即标记(这些点就是边缘点),赋1。 将小于TL的点抛弃,赋0;将大于TH的点立即标记(这些点就是边缘点),赋1。
• 将 大 于 T L , 小 于 T H 的 点 使 用 8 连 通 区 域 确 定 ( 即 : 只 有 与 T H 像 素 连 接 时 才 会 被 接 受 , 成 为 边 缘 点 , 赋 1 ) 将大于T_L,小于T_H的点使用8连通区域确定(即:只有与T_H像素连接时才会被接受,成为边缘点,赋1) 将大于TL,小于TH的点使用8连通区域确定(即:只有与TH像素连接时才会被接受,成为边缘点,赋1)
效果如下:

可以看到很多若边缘点被进一步的过滤掉。
(五)代码实现
li_canny.c
#ifndef LI_CANNY_C
#define LI_CANNY_C
#include "cv.h"
#include "li_image_proc.h"
#include main.c
/*
* @Descripttion:
* @version:
* @Author: Yueyang
* @email: [email protected]
* @Date: 2020-10-26 19:35:49
* @LastEditors: Yueyang
* @LastEditTime: 2020-11-12 10:01:13
*/
#include (六)写在后面
因为LiteCV项目才刚刚写了一个开头,代码中有错误的地方还望指出。我已经将项目同步到了github,我会实时更新这个代码仓库。
项目github地址:
LiteCV