创建 cv::Mat
OpenCV 中用数据格式 cv::Mat 存储图片。
有以下几种生成 cv::Mat 的方式:
直接或间接指定图片的行、列维度
cv::Mat myMat(240, 320, CV_8U, cv::Scalar(255)); // 240 行 × 320 列,每个元素的类型为 8 位无符号整型,单通道,元素初值为 255
// 或者
cv::Mat myMat(7, 7, CV_8U, 50);
// 或者
cv::Mat myMat(cv::Size(240, 320), CV_8U, cv::Scalar(1)); // 以 (x=240,y=320) 的形式送入,图片左上角默认为坐标原点,
// x 轴正方向向右,y 轴正方向向下。因此 cv::Size(240, 320) 就对应了 320行,240 列。
// 或者通过 size() 函数得到某个图片的大小,返回的是 image1 的 (x,y),即列数和行数
cv::Mat myMat(image1.size(), CV_8U, cv::Scalar(0));
CV_8U 代表 8 位无符号,U 替换成 S 表示有符号。一般用来表示灰度图
CV_8UC3 表示 8 位无符号 3 通道,一般用来表示彩图。
CV_16SC3 表示16 位有符号 3 通道
CV_32F 表示 32 位浮点数
用 create( ) 函数对原 Mat 重新赋值
image1.create();
// 若大小和类型不同时,可以重新指定这些参数
image1.create(200, 200, CV_8U);
出于性能方面的考虑,如果新的尺寸和类型与原来相同,则不会重新分配内存空间。
无修改的深复制 copyTo( ) 和 clone( )
image1.copyTo(image2);
// 或者
cv::Mat image3 = image1.clone();
上述两种复制方法保留原始大小和数据类型
有修改的深复制 convertTo( )
image1.convertTo(image4,
CV_32F, // 数据类型转化成浮点型
1/255.0, // 缩放因子
10.0); // 偏移量。最终结果就是 x/255.0 + 10
如果 Mat 元素很少且已知,例如输入相机的内参矩阵,就可以在初始化时直接输入
cv::Mat K = (cv::Mat_(3,3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
读入图片
- 原样读取,不特别设定为灰度图或者彩色图像,把第二个参数设定为负数即可,例如:
cv::Mat image = cv::imread(“image.jpg”, -1);
- 读取为灰度图:
cv::Mat image = cv::imread("image.jpg", cv::IMREAD_GRAYSCALE);
// 或者写对应的编号
cv::Mat image = cv::imread("image.jpg", 0);
- 读取为彩色图:第二个参数设定为正数,或者设定为
cv::IMREAD_COLOR
第二个参数取值总结:
waitkey( ) 等待
一般与 imshow() 连用,效果是暂停处理,让图片显示给定时间。
cv::waitKey( int delay=0)
- delay <= 0,无限等待
- delay >0 ,等待 delay 时间,单位为 ms
如果在等待期间有按键输入,则返回值为按键对应的编码;如果等待期间没有按键,则返回 -1.
整行、整列赋值
image.row(2).setTo(cv::Scalar(100));
image.col(2).setTo(cv::Scalar(100)); // 以上两个命令针对灰度图/单通道
image.col(2).setTo(cv::Scalar(0, 20, 34)); //彩色,OpenCV 中颜色通道默认顺序为 B、G、R
查找最小值、最大值及其位置
cv::minMaxLoc(src, double* minVal, double* maxVal=0,
Point* minLoc=0, Point* maxLoc=0,
InputArray mask=noArray())
- src:输入的图像。
- minVal:最小值,可输入NULL表示不需要。
- maxVal :最大值,可输入NULL表示不需要。
- minLoc:最小值的位置,可输入NULL表示不需要,Point类型。
- maxLoc:最大值的位置,可输入NULL表示不需要,Point类型。
- mask:选定在哪些区域进行搜索。noArray() 表示没有设置 mask
如果只需要得到最小值和最大值,而不需要位置:
double my_min, my_max;
cv::minMaxLoc(input, &my_min, &my_max); // 只需要送入变量地址即可
像素运算之后截断
当涉及到像素值之间的加、减时,为了得到有意义的结果,一般要进行截断操作。
比如取值在 0~255 的像素,当运算结果 > 255 时,取为 255;当结果 < 0 时,取 0.
result = cv::saturate_cast(some expression)
实际上,很多 cv 的函数默认内置了 saturate_cast 操作,比如下边提到的 cv::add 和重载的 + 运算。
重载运算符
比较常用的重载有
- 加、减
- 函数 min, max, abs
- 比较运算符 <, <=, ==, !=, >, >=,返回 8 位的二进制值。
- 矩阵运算:乘法、求逆 image.inv()、转置 image.t()、行列式 image.determinant()、范数 image.norm()、叉乘 v1.cross(v2)、点乘 v1.dot(v2)。 这些运算都不是 in place 的,即不改变原数据。
- 组合运算符,如 +=
opencv 中的随机数
cv::RNG rng;
rng.uniform(0,255); // 生成范围内的随机数
两图像叠加
cv::add(image1, image2, result)
//或者加权形式
cv::addWeighted(image1, weight1, image2, weight2, const, result)
OpenCV 中已经重载了 + 运算符,因此可以直接这样:
result = weight1 * image1 + weight2 * image2 + const
图像通道拆分与合并
将三通道拆分出来,存到 vector 中
std::vector planes;
cv::split(image1, planes);
合并回去
cv::Mat result;
cv::merge(planes, result);
这里用的是 c++ 模板中的 vector 数据类型:std::vector。
阈值操作
cv::threshold(input, // 输入的图片
output, // 输出的图片
theshold, // 设定的阈值
255, // 超过阈值的像素值取为 255,其余为 0
cv::THRESH_BINARY_INV); // 但这里用了 INV 反向操作,小于等于阈值的取 255,其余为 0
图像重映射
这里的重映射是指将原图中的元素经过某种位置变换,得到新图。这里只是改变了元素的位置,没有修改元素的值。
通过 cv::remap 函数实现。
首先定义重映射参数矩阵
cv::Mat srcX(image.rows, image.cols, CV_32F);
cv::Mat srcY(image.rows, image.cols, CV_32F);
目标图像在 处的像素来自原图的下列位置
(srcX.at(i,j), srcY.at(i,j))
然后在这两个参数矩阵中定义具体的位置映射关系
for (int i=0; i(i,j) = j; // 来自原图的 j 列
srcY.at(i,j) = i+5*sin(j/10.0); // 来自原图的 i+5*sin(j/10) 行,即正弦扭曲
}
}
最后调用 cv::remap 函数
cv::remap(image, result, srcX, srcY, cv::INTER_LINEAR);
反色
对于灰度图,直接用 255 减去就可以了!
cv::Mat result1_inv = 255 - result1;
获取图像元素的常用方法
- 用
cv::Mat类中的at()方法:
image.at(i,j);
image.at(i,j)[0]
上边尖括号中的数据类型就是灰度图和彩图中常用的数据类型:uchar 和 cv::Vec3b。
在使用 at() 时有一个需要注意的问题:
at() 函数有多个重载的形式,例如既有 at(int row, int col),也有 at(Point2f()) 。Point2f 格式对应的是 (x,y) 坐标,x 轴向右,y 轴向下,与 (row, col) 正好颠倒。因此在调用时一定要注意参数是 (row, col) 形式还是 Point2f(x,y) 坐标形式。
- 每次用 at 必须指明元素的数据类型,比较麻烦。可以用另一种方式:
cv::Mat_ img(image);
img(50, 10)=200;
即在定义变量时就已经指明了元素类型,后边直接取用就可以了。
数据类型的编号
cv::Mat test = cv::Mat::zeros(3,3,CV_64F);
test.type(); // 返回 6
用 .type() 函数即可返回 Mat 的数据类型,但是返回的是一个整数,需要查看下表确定到底是什么类型:
| C1 | C2 | C3 | C4 | |
|---|---|---|---|---|
| CV_8U | 0 | 8 | 16 | 24 |
| CV_8S | 1 | 9 | 17 | 25 |
| CV_16U | 2 | 10 | 18 | 26 |
| CV_16S | 3 | 11 | 19 | 27 |
| CV_32S | 4 | 12 | 20 | 28 |
| CV_32F | 5 | 13 | 21 | 29 |
| CV_64F | 6 | 14 | 22 | 30 |
列代表通道数目,例如灰度图就是 C1, jpg 彩图就是 BGR C3,PNG 彩图除了 BGR 还有一个透明度通道,所以是 C4。
在用.at<> 获取 Mat 中的数据时,需要指明元素的数据类型,比如灰度图是 uchar 而不是 CV_8U,查看下表:
| C1 | C2 | C3 | C4 | C6 | |
|---|---|---|---|---|---|
| uchar | uchar |
cv::Vec2b |
cv::Vec3b |
cv::Vec4b |
|
| short | short |
cv::Vec2s |
cv::Vec3s |
cv::Vec4s |
|
| int | int |
cv::Vec2i |
cv::Vec3i |
cv::Vec4i |
|
| float | float |
cv::Vec2f |
cv::Vec3f |
cv::Vec4f |
cv::Vec6f |
| double | double |
cv::Vec2d |
cv::Vec3d |
cv::Vec4d |
cv::Vec6d |
这里的 cv::Vec3b 中 b 是 byte 的意思,表示占用一个字节。
颜色空间的转换
用 cv::cvtColor 转换前后,图像的数据类型是相同的。
- 彩图到灰度:
if (image.channels()==3){
cv::cvtColor(image, result, cv::COLOR_BGR2GRAY);
// 老版本的 opencv 用这个 flag
// cv::cvtColor(color, gray, CV_BGR2Gray)
}
- 灰度到彩图:
cv::cvtColor(image, result, cv::COLOR_Gray2BGR) // 三个通道数值相同
cv::cvtColor( )函数可以实现很多颜色空间的转换,除了 BGR、灰度图,还有 HSV, HLS,Lab, Luv, YCrCb 等。
感知均匀的色彩空间
原始的 BGR 颜色表示方法有个缺陷:在颜色空间中的差距并不能很好的反映人视觉感知的差距。
两种在空间中距离很远的颜色可能肉眼看起来很接近;而有些在空间距离很近的颜色,看起来差别却很大。因此,BGR 不是感知均匀的色彩空间。
下边是两种感知均匀的色彩空间:
- CIE L * a * b *
L 通道:表示亮度,取值 0~100。在使用 8 位图像时,取值 0~255
a 通道和 b 通道:表示色度部分,与亮度完全无关,取值 -127~127,对于 8 位图,取值 0~255.cv::cvtColor(image, converted, cv::COLOR_BGR2Lab) - CIE L * u * v *
对亮度通道采用相同的转换公式,但对色度通道使用不同的方法。cv::cvtColor(image, converted, cv::COLOR_BGR2Luv)
色调、饱和度、亮度空间
人类在描述颜色时,经常说色调、饱和度、亮度等词语,下边的两种色彩空间就是这样设计的:
-
HSV
H: 色调 hue
S: 饱和度 saturation
V: 明度 valuecv::cvtColor(image, hsv, cv::COLOR_BGR2HSV)可以把三通道分割开:
std::vector HLS
H: 色调 hue
L: 亮度 lightness
S: 饱和度 saturation
HSV 和 HLS 有时也统称为 HSB ,最后的 B 表示 brightness 亮度。
可以用圆锥体直观地表示 HSB 色彩空间:
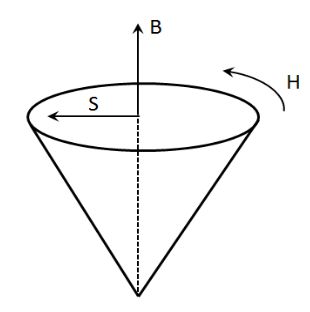
- 角度表示色调 H,本来应该用 0~360 表示色调,但是为了适应 8 位图,采用了 0~180,0 度对应红色。
- 距中轴线的距离表示饱和度 S
- 高度表示亮度 B
如果要进行图片的 HSB 分析,尤其是涉及到色调(第一个分量)的时候,由于饱和度(第二个分量)低的区域色调信息不准确,因此往往先对饱和度做一些过滤,只分析那些饱和度比较高的区域的色调。
区域图像提取
cv::Mat imageROI = image(cv::Rect(216, 33, 24, 30)); // 从原始图片 image 中提取了一个小方块
// 或者
cv::Mat imageROI(image2, cv::Rect(0,0,image2.cols,image2.rows/2));
随后就可以把提取出来的 imageROI 当成普通图片处理了。
添加几何图形和文字
外加图形和文字的颜色维度取决于原始图像的维度。
若原始为灰度图,则设定外加颜色时,即使写出三维像素值 cv::Scalar(255, 0, 128) 也只看第一维的数值;
若原始为彩图,则设定外加颜色时,只写 0 或者 255 表示只设定了第一个颜色通道的值,例如 255 相当于 cv::Scalar(255, 0, 0)
-
线段
cv::line(image, cv::Point(5, 5), cv::Point(210, 200), // 线段的两个端点 cv::Scalar(255), // 颜色 1); // 粗细 -
矩形方框
cv::Rect rect(110, 45, 35, 45); // 设定一个方框,左上角坐标+宽+长 cv::rectangle(image, rect, cv::Scalar(0,0,255)); // 在 image 图像上添加 rect 方框,红色 //或者直接把矩形放在内部定义 cv::rectangle(image, cv::Rect(110, 45, 35, 45), 0); // 或者以两对点集来表示,分别为左上角坐标和右下角坐标 cv::rectangle(image, cv::Point(5,5), // 左上角坐标 cv::Point(210, 200), // 右下角坐标 cv::Scalar(255), // 颜色 3); // 线条粗细 -
圆
cv::circle(image, // 原始图像 cv::Point(155, 110), // 圆心, 以 cv::Point(x,y) 表示图像中的坐标 65, // 半径,必须为 int 类型 0, // 颜色 3); // 线条宽度,若为负数,则画实心圆 -
加重心
假设图像中物体轮廓已经找到了,要依据轮廓添加物体的重心位置。
一般计算重心的时候,首先要计算图像的矩 (moment),再基于各阶矩计算出重心:itc = contours.begin(); // 已经有了若干轮廓线 while (itc != contours.end()){ cv::Moments mom = cv::moments(cv::Mat(*itc++)); // 求每条轮廓的各阶矩 cv::circle(result, cv::Point(mom.m10/mom.m00, mom.m01/mom.m00), // 通过这种方式计算重心 2, cv::Scalar(0), 2 ); }原理:
对于二元连续函数 ,它的 阶矩为
对于离散的图片 ,对应的 阶矩为
因此,图片 的重心为
-
椭圆
可以通过外包矩形的方式画出椭圆std::vector也可以直接指定椭圆的形状参数
cv::ellipse(image, cv::Point(WINDOW_WIDTH / 2, WINDOW_WIDTH / 2), // 椭圆中心点 cv::Size(WINDOW_WIDTH / 4, WINDOW_WIDTH / 16), // 两个轴的长度 angle, // 椭圆倾斜的角度 0, 360, // 椭圆包围的起始和终止角度 Scalar(255, 129, 0), thickness); -
多边形
std::vector -
加文字
cv::putText(image, "This is a dog.", cv::Point(40, 200), // 文本位置,文本的左下角对应的坐标 cv::FONT_HERSHEY_PLAIN, // 字体类型 2.0, // 字体大小 255, // 字体颜色,这里相当于 cv::Scalar(255, 0, 0) 2); // 字体粗细
直线拟合
由点集拟合出一条直线。一般的拟合目标是使所有点到直线的距离之和最小。
在计算距离的函数中,欧几里得距离计算的最快,对应参数 cv::DIST_L2,实际上也就是基于最小二乘算法的拟合。
std::vector points; // 假设我们已经获取了节点集合
cv::Vec4f line; // 待拟合的直线
cv::fitLine(points, // 点集
line, // 拟合出的直线
cv::DIST_L2, // 采用的距离类型
0, // L2 距离不需要这个
0.01,
0.01); // 拟合出的直线参数精度
直线是 cv::Vec4f 的格式,包含四个数,前两个数表示单位向量方向,后两个数表示直线上的一个坐标。
也可以在三维空间中拟合直线,只需要将点集和直线的数据类型相应地修改一下:
std::vector points;
// 或者
std::vector points;
cv::Vec6f line;
改变图片大小 resize
cv::resize(image,
result,
cv::Size(), // 指定改变之后的大小
4, 4, // 指定 x,y 方向(即 width, height)缩放比例。本行与上一行至少要设定一个
cv::INTER_NEAREST); // 插值方式
图片大小改变后,像素值要重新计算,有以下插值方法:
- INTER_NEAREST - 最邻近插值,对于放大图像的情况,就是简单的把每个像素的尺寸放大。
-
INTER_LINEAR - 双线性插值,如果最后一个参数不指定,默认使用这种方法。
所谓双线性,就是先在插入点的两侧线性插入新像素值,再以此为基础,再次线性的插入像素值。整个过程中用到 2x2 = 4 个原始像素。
 interpolation1.png
interpolation1.png - INTER_CUBIC - 4x4像素邻域内的双立方插值
- INTER_LANCZOS4 - 8x8像素邻域内的Lanczos插值
以上插值算法计算复杂度依次增加,效果也是依次提升的。
扫描图像元素的方法
- 用
.at函数// 减色运算操作 for(int j=0; j - 用指针
如果要按顺序依次获取图像像素信息,尽量不要用上述 image.at 方法,而要用指针,指针在移动扫描操作时效率更高。int nc = image.cols * image.channels(); for (int j=0; j
另外,少层循环 + 每个循环中较多操作 好于 多层循环 + 每个循环中较少操作。
例如要对一个像素执行 N 个不同的操作,就应该在单个循环中执行全部操作,而不是写 N 个循环,每个循环执行一个操作。
- 用迭代器 (iterator)
cv::Mat_
减色算法
默认 BGR 三色都是采用 8 位二进制数,即有 0~255 种选择,三通道互相搭配总共的颜色数目为 256 * 256 * 256。 为了降低分析的复杂度,可以先对原图做减色处理,将每个通道颜色的数量降低为原来的 1/n,例如 n=8,则新的图片总共的颜色数目只有 32 * 32 * 32 。
算法步骤:
- 假设 N 为减色因子,将图像中每个像素的值除以 N,去掉余数部分
- 将上述结果乘以 N,得到原始像素值相对于 N 的倍数(相当于向下取整)
- 再加上 N/2,这样相对于原始像素值的误差就从 -N ~ 0 变成了 -N/2 ~ N/2 ,近似效果更好
- 减色之后共有 (256/N) * (256/N) * (256/N) 种颜色。
锐化图像
目的是放大图像边缘,使图像看起来更加尖锐
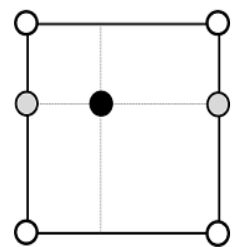
对于每个像素,令本身像素值乘以5,然后减去周围的 4 个像素值,即
这种操作实际上就是一种卷积
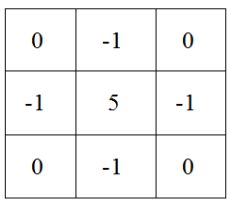
用上述 kernel matrix 依次扫过图像,即完成了上述的锐化操作。