64位操作系统——(二)kernel
64位操作系统——(二)kernel
作者:王赛宇
参考列表:
- 主要参考:《一个六十四位操作系统的设计与实现》——田雨
- 《Using as》 ——Dean Elsner & Jay Fenlason & friends
- nasm 用戶手册
- 处理器startup.s 常见汇编指令…
前情提要
在第一章节中,我们学习、研读了bootloader的代码,bootloader可以被分为两个过程:
boot:计算机上电,自检完成后自动执行0x7c00处的boot程序,该程序被限制了大小512KB,所以它仅用于进行计算机磁盘设定以及加载、跳转到loaderloader:从boot处跳转而来,进入loader时计算机仍处于实模式,尽可操作1MB内存,但我们进入了Big Real Mode让计算机能够操作4GB的内存,并通过这种方法将检索到的kernel程序放置在了内存的1MB处,并且通过两步(实模式–保护模式–长模式)的方法进入了长模式,在长模式下cpu可以操作非常大的内存(16T),每一次切换模式,我们都使用一条长跳转语句来切换当前代码的运行状态,在跳转到长模式时,使用长跳转跳转到了内核程序所在的地址,到此为止我们完成了从bootloader模块到操作系统内核的切换,电脑的控制权交到了操作系统内核的手中。
在这一章中,我们将继续完成64位操作系统,值得一提的是,在上一章中,由于主要语言是汇编,我们(我太菜了dbq)只能以解读、copy为主,但是在这一章中,主要语言从汇编变成了C语言,我希望我们的主要任务从解读变为理解 --> 复现;下面,我们开始这一章的学习。
内核执行头程序head.S
我们还是需要写一小会汇编。
什么是内核执行头程序
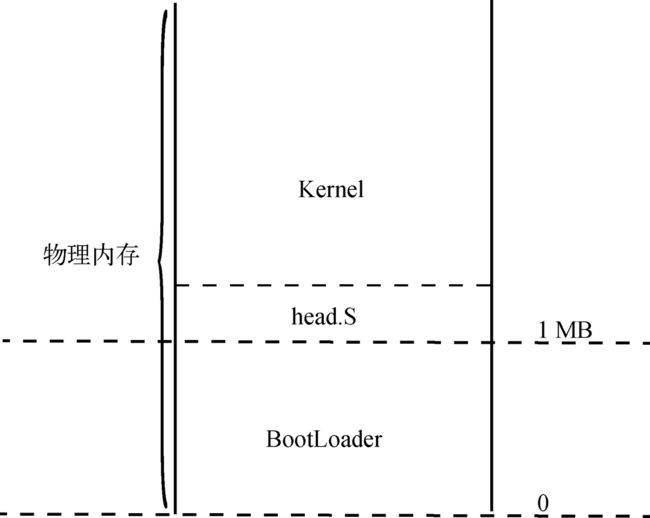
我们知道,在loader的最后进行了一次长跳转,跳转到了kernel.bin的起始地址,这个起始地址实际上就是物理地址0x100000,内核头程序就是被装载到0x100000上的程序,它是内核程序的一部分,但内核执行头程序是一个汇编程序,它主要负责为操作系统创建段结构与页结构,设置某些结构的默认处理函数以及配置关键寄存器等工作。
接下来,还有一个非常重要的问题:如何将内核执行头程序装载到我们想要的地址?
这里我们需要自己去写一个链接脚本,在连接脚本中,会对不同程序的空间进行布局。这个链接脚本不是我们当前阶段需要关心的内容,我们直接使用作者提供的即可。但我们需要知道:
内核层的起始线性地址
0xffff800000000000对应着物理地址0处,内核程序的起始线性地址位于0xffff800000000000 + 0x100000。
定义各种表以及段结构(数据段)
这里我们还是以解读为主了:
#//======= gdt_table
.section .data // 数据段
.globl gdt_table // 声明全局符号,可以被其他程序调用
gdt_table:
// 一次写8个Byte
.quad 0x0000000000000000 /*0 NULL descriptor 00*/
.quad 0x0020980000000000 /*1 KERNEL Code 64-bit Segment 08*/
.quad 0x0000920000000000 /*2 KERNEL Data 64-bit Segment 10*/
.quad 0x0020f80000000000 /*3 USER Code 64-bit Segment 18*/
.quad 0x0000f20000000000 /*4 USER Data 64-bit Segment 20*/
.quad 0x00cf9a000000ffff /*5 KERNEL Code 32-bit Segment 28*/
.quad 0x00cf92000000ffff /*6 KERNEL Data 32-bit Segment 30*/
.fill 10,8,0 /*8 ~ 9 TSS (jmp one segment <7>) in long-mode 128-bit 40*/
// 重复十次,每次覆盖八个字节,每个位置都填充为0
GDT_END:
GDT_POINTER:
GDT_LIMIT: .word GDT_END - gdt_table - 1
GDT_BASE: .quad gdt_table
//======= idt_table
.globl idt_table
idt_table:
.fill 512,8,0
IDT_END:
IDT_POINTER:
IDT_LIMIT: .word IDT_END - idt_table - 1
IDT_BASE: .quad idt_table
//======= TSS64_Table
.globl TSS64_Table
TSS64_Table:
.fill 13,8,0
TSS64_END:
TSS64_POINTER:
TSS64_LIMIT: .word TSS64_END - TSS64_Table - 1
TSS64_BASE: .quad TSS64_Table
在解读之前给大家推荐一个网站,大家可以使用这个网站来搜索相应的汇编关键词:https://sourceware.org/binutils/docs/as/,本文档中的汇编知识全部来自于这个网站(需要注意的是,我们这里不再使用上一章节的nasm了,使用的是GNU提供的汇编器GAS)
这里在做的事情还是和上一章最后在做的事情一样:定义了GDT表、IDT表、TSS64,这里的TSS64是任务状态段。他们都会被存储在内核程序的数据段中。
我们来熟悉一下里面的一些语句:
.section .data:这个语句的前半部分.section表示把代码分成若干段,程序被加载时会加载到不同的地址,.data代表这部分代码书写的是程序的数据段,数据段是可读可写的。.globl gdt_table:首先这个语句的.globl是一个声明,这个声明是告诉汇编器,后面的符号需要被连接器用到,所以要在目标文件的符号表中标记它是一个全局符号,这里是告诉连接器gdt_table是一个全局符号,gdt_table是一个标签,他的内容在下面进行了定义.quad 0x0000000000000000:.quad指令类似于上一章中的db指令,都是用于填充二进制的,但是.quad指令是用于填充一个8 Byte的二进制数字的,如果你仔细一数,就发现上面的十六进制数字由16个0构成,占空间8 Byte。.fill 10,8,0:这个.fill的标准用法如下fill repeat, size, value,这里就表示重复十次,每次写8个字节,填充的内容是0。GDT_LIMIT: .word GDT_END - gdt_table - 1:这里的.word实际上和.quad是相似的,只不过它是存储了4Byte的数据。
这里出现的所有汇编语句我们都解释一遍了,大体上来说这里是一个数据段,定义了两个表个一个段,同时使用.globl使定义的数据段成为全局符号,可以被其他程序调用。
创建并初始化页表及页表项
//======= init page
.align 8
.org 0x1000
__PML4E:
.quad 0x102007
.fill 255,8,0
.quad 0x102007
.fill 255,8,0
.org 0x2000
__PDPTE:
.quad 0x103003
.fill 511,8,0
.org 0x3000
__PDE:
.quad 0x000083
.quad 0x200083
.quad 0x400083
.quad 0x600083
.quad 0x800083
.quad 0xe0000083 /*0x a00000*/
.quad 0xe0200083
.quad 0xe0400083
.quad 0xe0600083 /*0x1000000*/
.quad 0xe0800083
.quad 0xe0a00083
.quad 0xe0c00083
.quad 0xe0e00083
.fill 499,8,0
这段代码中有两个我们不大熟悉的地方:
-
.align 8:这个地方代表我们将下一条语句进行对齐,对齐的单位是8,比如说这下语句本来会被放在结尾是5的内存中,那么加入这条语句后,就会将下条语句的地址进行对齐,对齐的方法是后移。官方给出的描述是:'.align 8'将位置计数器递增到它的8的倍数。如果位置计数器已经是8的倍数,则无需更改。 -
.org 0x3000:.org表示当前节的位置计数器前进到给定的位置,如果这个位置有错,那么就忽略这条语句。官方的指南中有这样的描述:.org只能增加或不改变位置计数器;您不能使用.org将位置计数器向后移动。以本程序为例,这个
.org 0x3000会试图将当前的代码放置在程序头部偏移0x3000的位置,那么程序头部的位置我们已经在最开始的时候说过了,就是:0xffff800000000000 + 0x100000,那么__PDE会被存放在线性地址为0xffff800000000000 + 0x100000 + 0x3000的位置,其他的也是同理。
这里定义的是页表相关的数据。此页表将线性地址0和0xffff800000000000映射为同一物理页以方便页表切换,即程序在配置页表前运行于线性地址0x100000附近,经过跳转后运行于线性地址0xffff800000000000附近。这里将前10 MB物理内存分别映射到线性地址0处和0xffff800000000000处,接着把物理地址0xe0000000开始的16 MB内存映射到线性地址0xa00000处和0xffff800000a00000处,最后使用伪指令.fill将数值0填充到页表的剩余499个页表项里。
再次进行IA-32e模式初始化
.section .text
.globl _start
_start:
mov $0x10, %ax
mov %ax, %ds
mov %ax, %es
mov %ax, %fs
mov %ax, %ss
mov $0x7E00, %esp
//======= load GDTR
lgdt GDT_POINTER(%rip)
//======= load IDTR
lidt IDT_POINTER(%rip)
mov $0x10, %ax
mov %ax, %ds
mov %ax, %es
mov %ax, %fs
mov %ax, %gs
mov %ax, %ss
movq $0x7E00, %rsp
//======= load cr3
movq $0x101000, %rax
movq %rax, %cr3
movq switch_seg(%rip), %rax
pushq $0x08
pushq %rax
lretq
//======= 64-bit mode code
switch_seg:
.quad entry64
entry64:
movq $0x10, %rax
movq %rax, %ds
movq %rax, %es
movq %rax, %gs
movq %rax, %ss
movq $0xffff800000007E00, %rsp /* rsp address */
movq go_to_kernel(%rip), %rax /* movq address */
pushq $0x08
pushq %rax
lretq
go_to_kernel:
.quad Start_Kernel
这里的流程和前面完全一致,我们主要来解读汇编代码:
-
.section .text表示一个新的段,这个.text表示这里是代码段 -
_start相当于c语言的main函数,他必须被声明为globl,程序从这里开始执行 -
mov $0x10, %ax将立即数0x10赋值给寄存器%ax -
mov %ax, %ds将%ax寄存器中的值赋值给%ds -
lgdt GDT_POINTER(%rip)这里仍然是在装载GDT表,但是寻址方式有所变化:Intel汇编语言格式 AT&T汇编语言格式 RIP-Relative寻址 [rip + displacement]displacement(%rip) -
函数跳转:这里作者用了一个非常有意思的方法,总体来说:作者伪造了函数调用的现场,假装自己被调用了,然后再假装自己调用结束,返回了。这样cpu就会进入我们刚才push到栈中的地址,或者说是“返回到”刚才push到栈中的地址。
做了这些讲解之后,这段代码就非常好懂了:
- 首先:初始化了一系列寄存器的值
- 第二步:读取了GDT、IDT表,更改了cr3
- 第三步:使用特殊的跳转方法跳转到了
entry 64函数 - 第四步:在
entry 64函数中,完成进入64位操作系统的操作后,跳转到Start_Kernel函数
由于这里没有定义Start_Kernel函数,所以是无法完成跳转的
makefile
kernel的makefile,这个非常简单,我们就不多讲解了。
all: head.o
head.o: head.S
gcc -E head.S > ./build/head.s
as --64 -o ./build/head.o ./build/head.s
clean:
rm -rf ./build/*
对于主文件夹下的makefile这里我们用到了makefile中的for循环:
BOOT_SRC_DIR=./src/boot
KERNEL_SRC_DIR=./src/kernel
SUBDIRS=$(BOOT_SRC_DIR) $(KERNEL_SRC_DIR)
define \n # 定义换行符,下面要用
endef
BOOT_BUILD_DIR=$(BOOT_SRC_DIR)/build
KERNEL_BUILD_DIR=$(KERNEL_SRC_DIR)/build
PROJECT_BUILD_DIR=./build
all:
# 遍历每一个文件夹,进行编译
$(foreach dir, $(SUBDIRS), cd $(dir) && $(MAKE) ${\n})
install:
# 将boot的bin写入到引导扇区内
echo "特别声明:不要删除boot.img,如果删除了, 请到64位操作系统书中36页寻找复原方法"
dd if=$(BOOT_BUILD_DIR)/boot.bin of=$(PROJECT_BUILD_DIR)/boot.img bs=512 count=1 conv=notrunc
sudo mount $(PROJECT_BUILD_DIR)/boot.img /media/ -t vfat -o loop
sudo cp $(BOOT_BUILD_DIR)/loader.bin /media
sudo cp $(BOOT_BUILD_DIR)/kernel.bin /media
sync
sudo umount /media/
echo 挂载完成,请进入build文件夹后输入"bochs"以启动虚拟机
clean:
# 遍历每一个文件夹,进行删除
$(foreach dir, $(SUBDIRS), cd $(dir) && $(MAKE) clean ${\n})
这里方法也很简单,就是遍历每一个SUBDIRS中的文件夹,进行make操作,操作完再回来,再进入下一个文件夹。
这里使用了define定义了换行符,然后使用foreach方法,对于每一个$(SUBDIRS)中的文件夹dir,我们输出的内容是:
cd $(dir) && $(MAKE) ${\n}
意思就是进入文件夹、执行make、输出换行,之所以输出换行,是因为makefile中的cd仅在当前行有效,也就是说,我们换行就相当于回到主文件夹下重新执行了,这样就可以完成循环进入所有子文件夹,执行make的操作。
内核主程序
简单回顾一下,我们在上个小节中完成了三个表的声明与数据填充,并且重新进行了IA-32e模式的初始化,在内核执行头程序的最后,跳转到了Start_Kernel函数,这个Start_Kernel函数就是这一节我们想要介绍的内核主程序的主体。一般情况下,它将负责调各个系统模块的初始化函数,在初始化结束后,他会创建出系统的第一个进程init,并且将控制权交给init进程。
当然了,在这一个小节中,我们只是写一个“假的”内核主程序,在之后的其他小节中,我们会继续完善它。这一节主要讲解怎么去编译、链接它。
写一个“假的”内核主程序
这个就很脑瘫了,我们只要写一个含有Start_Kernel函数的程序即可,这里是main.c:(终于见到亲切的高级语言了)
// 内核主程序,执行完内核执行头程序后会跳转到Start_Kernel函数中
void Start_Kernel() {
while(1){
;
}
}
这里我们就让他原地空转(死循环),接下来我们讨论如何编译它的问题。
编译内核主程序
这里我们继续完善我们的makefile文件,在此之前我们来完整的看一下当前的文件夹结构(之前从来没介绍过,大家可能看我的makefile的时候会很懵逼):
64BIT_OS
├─ README.md : 项目描述文件
├─ build :整个项目生成的可执行空间, 在这个文件夹下执行bochs就可以直接打开生成好的虚拟机
│ ├─ .bochsrc :虚拟机的描述文件
│ └─ boot.img :虚拟机的镜像文件
├─ docs :这个文档所在的文件夹,用于存储文档以及文档中用到的图片
├─ makefile : 整个项目的make脚本
└─ src :源码目录
├─ boot:bootloader模块
│ ├─ boot.asm :boot
│ ├─ build :bootloader模块编译生成的文件都存储在这里
│ ├─ fat12.inc :被%include的东西
│ ├─ loader.asm :loader
│ └─ makefile :bootloader模块的makefile文件,该脚本生成的文件都放在boot\biuild文件夹下
└─ kernel:内核模块
├─ build :kernel模块编译生成的文件都存储在这里
├─ head.S
├─ main.c
└─ makefile : 内核的make脚本
这里我们继续完善的是kernel/makefile。在自己写之前,我们先来了解一下一个编译器在编译一个文件的时候执行的操作,为了完整的演示整个过程,我们再写一套专门用来演示的程序:(当然,你可以不看着一部分,这一部分只是为了让你深刻理解gcc编译器在编译一段程序的完整过程中会干些什么)
演示程序
temp.h
int a = 1;
int b = 2;
int c = 3;
temp.c
#include "temp.h"
int main() {
a = b + 1;
}
这里我们使用gcc temp.c就会生成一个可执行文件a.out,执行a.out时什么都不会输出,因为我们没有让这个程序输出。
编译过程
-
预编译:我们在控制台执行指令
gcc -E temp.c -o temp.i表示执行预编译,并且指定输出文件为temp.i,完成后打开temp.i查看:# 1 "temp.c" # 1 "" # 1 " " # 1 "/usr/include/stdc-predef.h" 1 3 4 # 1 " " 2 # 1 "temp.c" # 1 "temp.h" 1 int a = 1; int b = 2; int c = 3; # 7 "temp.c" 2 int main() { a = b + 1; } 可以看到,这里生成了一个文件,这个文件的实质就是把
temp.h中的内容复制了进来。 -
汇编:继续执行
gcc -S temp.i -o temp.s:.file "temp.c" .text .globl a .data .align 4 .type a, @object .size a, 4 a: .long 1 .globl b .align 4 .type b, @object .size b, 4 b: .long 2 .globl c .align 4 .type c, @object .size c, 4 c: .long 3 .text .globl main main: .LFB0: .cfi_startproc endbr64 pushq %rbp .cfi_def_cfa_offset 16 .cfi_offset 6, -16 movq %rsp, %rbp .cfi_def_cfa_register 6 movl b(%rip), %eax addl $1, %eax movl %eax, a(%rip) movl $0, %eax popq %rbp .cfi_def_cfa 7, 8 ret .cfi_endproc .LFE0: .size main, .-main .ident "GCC: (Ubuntu 9.3.0-17ubuntu1~20.04) 9.3.0" .section .note.GNU-stack,"",@progbits .section .note.gnu.property,"a" .align 8 .long 1f - 0f .long 4f - 1f .long 5 0: .string "GNU" 1: .align 8 .long 0xc0000002 .long 3f - 2f 2: .long 0x3 3: .align 8 4:这里生成了我们非常眼熟的
gas汇编语言。 -
生成编译好但没有连接的文件:
gcc - c temp.s -o temp.o这里生成的是一个二进制文件,打开它来看没啥意义
-
链接:
gcc temp.o -o temp:$ ./temp当然,执行他还是啥都不会发生,但是能够执行
到此为止,我们就把整个流程走了一遍了,相信大家都大致理解了编译的过程。
应用到项目中
回想一下我们要做的事情:先编译main.c,然后再让他按照我们的想法链接,于是我们就要先编译一下main.c,即在makefile中添加:
main.o: main.c
# 编译main.c内核主程序
gcc -mcmodel=large -fno-builtin -m64 -c main.c -o ./build/main.o
接下来我们指定链接脚本,并且进行链接:
system: head.o main.o
ld -b elf64-x86-64 -o ./build/system ./build/head.o ./build/main.o -T Kernel.lds
这句的意思就是链接head.o\main.o两个文件,指定输入的文件类型是efl64-x86-64,并且指定了链接脚本是Kernel.lds。
我们这里也新建一个链接脚本:
OUTPUT_FORMAT("elf64-x86-64","elf64-x86-64","elf64-x86-64")
OUTPUT_ARCH(i386:x86-64)
ENTRY(_start)
SECTIONS
{
. = 0xffff800000000000 + 0x100000;
.text :
{
_text = .;
*(.text)
_etext = .;
}
. = ALIGN(8);
.data :
{
_data = .;
*(.data)
_edata = .;
}
.bss :
{
_bss = .;
*(.bss)
_ebss = .;
}
_end = .;
}
这段脚本非常简单:
OUTPUT_FORMAT:指定输出的文件类型(和输入一样)OUTPUT_ARCH:指定输出的体系结构ENTRY:指定程序的入口(开始执行的地方)SECTIONS:指定了程序被加载到哪里,每个段的相对关系以及对齐位置
相应的,all也不再依赖head.o/main.o了,而是转而依赖system即可,之后还需要添加:
all: system
# 生成kernel.bin
objcopy -I elf64-x86-64 -S -R ".eh_frame" -R ".comment" -O binary ./build/system ./build/kernel.bin
这里使用了objcopy生成了kernel.bin,这里我们就生成了真·内核,所以我们就把上一章中的假内核删掉就可以了。我们要做出于以下改变:
-
将boot文件夹下的makefile中生成kernel.bin的语句和依赖删除(自己删,或者看我的源码,这里就不啰嗦了,非常简单)
-
更改主文件夹下拷贝
kernel.bin的语句(说白了就是把copy的源改一下就可以了):sudo cp $(KERNEL_BUILD_DIR)/kernel.bin /media
简单验证
我们要验证一下到此为止是否正确执行,这里我们使用反汇编指令:
objdump -D system
找到Start Kernel部分
ffff80000010400c: 48 8d 05 f5 ff ff ff lea -0xb(%rip),%rax # ffff800000104008
ffff800000104013: 49 bb 68 11 00 00 00 movabs $0x1168,%r11
ffff80000010401a: 00 00 00
ffff80000010401d: 4c 01 d8 add %r11,%rax
ffff800000104020: eb fe jmp ffff800000104020
这里就标记出了while语句的线性地址ffff800000104020
^C00156063365i[ ] Ctrl-C detected in signal handler.
Next at t=156063366
(0) [0x000000104020] 0008:ffff800000104020 (unk. ctxt): jmp .-2 (0xffff800000104020) ; ebfe
<bochs:2> r
CPU0:
rax: ffff8000_00105170 rcx: 00000000_c0000080
rdx: 00000000_00000000 rbx: 00000000_00000000
rsp: ffff8000_00007df8 rbp: ffff8000_00007df8
rsi: 00000000_00008098 rdi: 00000000_0000bd00
r8 : 00000000_00000000 r9 : 00000000_00000000
r10: 00000000_00000000 r11: 00000000_00001168
r12: 00000000_00000000 r13: 00000000_00000000
r14: 00000000_00000000 r15: 00000000_00000000
rip: ffff8000_00104020
eflags 0x00000092: id vip vif ac vm rf nt IOPL=0 of df if tf SF zf AF pf cf
RIP寄存器存放着当前指令的地址,这里指示的正是当前的跳转指令,也就是说程序已经进入了死循环,验证结果为正确。
clion
接下来我们的项目会用clion来接管,主要原因是:好看,提示比较全,当然,由于我的git配置的原因(我故意的),大家克隆下来的项目不会有任何迹象,这里我就简单介绍一下主要的方法,这里我是用的脚本来做的一键执行,因为我们的代码中需要赋权,赋权需要密码,所以我就没把握的脚本放到github上面,这里我就把我的脚本分享一下:
#!/usr/bin/env zsh
make clean
make
echo [passowrd] | sudo -S make install
make clean
cd build
bochs
在clion配置中,配置run.sh作为项目运行的脚本即可。上面的password直接填写自己的密码即可。
屏幕显示
之前在loader中,我们已经设置了显示模式:模式号:0x180、分辨率:1440×900、颜色深度:32 bit。我们在屏幕上显示东西的原理就是:将现实的画面存储到内存中的帧缓存区域中,帧缓存中的每一个存储单元对应着屏幕上的一个像素点。帧缓存的起始地址是:0xe0000000,我们之前在定义页表的过程中,已经进行了两组映射:
0xe0000000到0xffff800000a000000xe0000000到0xa00000
在屏幕上显示色彩
屏幕布局(画布)
首先,我们需要了解屏幕的布局:

我们的坐标系是从左上角为原点的。
单点像素构成
我们刚才说了,这个用的是32bit的颜色,这个描述方式只有前24位是有效位,他们分别表示rgb的值(其实就是标准的rgb描述)。
#define COLOR_OUTPUT_ADDR (int *)0xffff800000a00000
#define LINE_SIZE 1440
// 画点的方法,给出坐标与颜色,将其覆盖
void plot_color_point(int x, int y, char r, char g, char b);
// 内核主程序,执行完内核执行头程序后会跳转到Start_Kernel函数中
void Start_Kernel() {
int *addr = (int *)0xffff800000a00000;
int row, col;
// 根据行列进行绘图,先画20行红色
for(row = 0; row < 20; row++){
for(col = 0; col < LINE_SIZE; col++){
plot_color_point(row, col, 0xff, 0x00, 0x00);
}
}
for(row = 20; row < 60; row++){
for(col = 0; col < LINE_SIZE; col++){
plot_color_point(row, col, 0x00, 0xff, 0x00);
}
}
for(row = 60; row < 140; row++){
for(col = 0; col < LINE_SIZE; col++){
plot_color_point(row, col, 0x00, 0x00, 0xff);
}
}
for(row = 140; row < 300; row++){
for(col = 0; col < LINE_SIZE; col++){
plot_color_point(row, col, 0xff, 0xff, 0xff);
}
}
while(1){
;
}
}
/**
* 在屏幕上画一个点
* @author [email protected]
* @param x 在第x行上面画点
* @param y 在第y列上面画点
* @param r 点的红色色彩值
* @param g 点的绿色色彩值
* @param b 点的蓝色色彩值
*/
void plot_color_point(int x,int y, char r, char g, char b){
int* addr = COLOR_OUTPUT_ADDR + x * LINE_SIZE +y;
*((char *)addr+0)=r;
*((char *)addr+1)=g;
*((char *)addr+2)=b;
*((char *)addr+3)=(char)0x00;
}
我们将在屏幕上画一个点的方法进行封装,我们只需要给出需要绘画的点的横纵坐标以及rgb值即可进行绘图。绘图的方法也非常简单且暴力,就是直接覆盖对应的内存区域。在主程序中,我们多次调用这个方法进行绘图,绘出了四个不同颜色的矩形,效果如下:

显示字符串
在这一小节中,我们来实现向屏幕输出单个字符以及如何向屏幕输出一个字符串。我们的目标是实现一个printk函数,能够向屏幕输出一个字符串。
一个字符如何组成
我们都知道,电脑上看到的画面是由一个一个像素点组成的,同理,我们看到的字符也是由很多的像素点组成的,在我们的系统中,一个字符占16行8列的空间,如下:
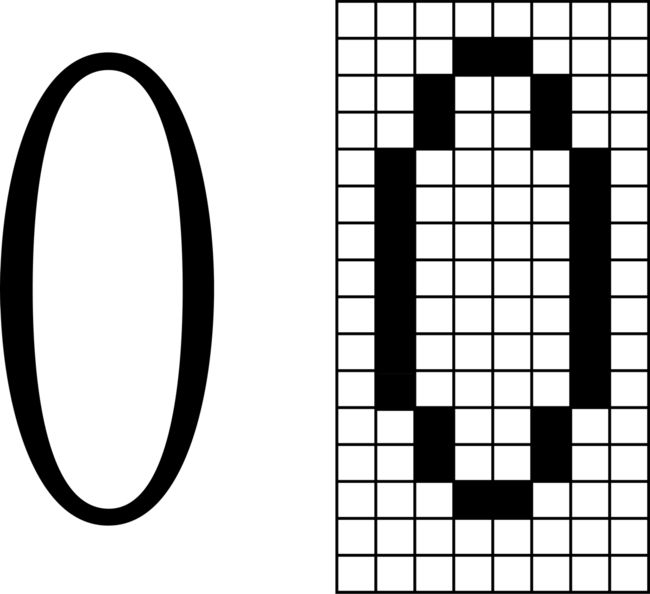
我们使用一个数组来记录每个字符的方块的内容:
unsigned char font_ascii[256][16]=
{
……
/* 0040 */
{0x02,0x04,0x08,0x08,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x08,0x08,0x04,0x02, 0x00}, // '('
{0x80,0x40,0x20,0x20,0x10,0x10,0x10,0x10,0x10,0x10,0x10,0x20,0x20,0x40,0x80, 0x00}, // ')'
{0x00,0x00,0x00,0x00,0x00,0x10,0x92,0x54,0x38,0x54,0x92,0x10,0x00,0x00,0x00, 0x00}, // '*'
{0x00,0x00,0x00,0x00,0x00,0x10,0x10,0x10,0xfe,0x10,0x10,0x10,0x00,0x00,0x00, 0x00}, // '+'
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x18,0x18,0x08,0x08, 0x10}, // ','
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xfe,0x00,0x00,0x00,0x00,0x00,0x00, 0x00}, // '-'
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x18,0x18,0x00, 0x00}, // '.'
{0x02,0x02,0x04,0x04,0x08,0x08,0x08,0x10,0x10,0x20,0x20,0x40,0x40,0x40,0x80, 0x80}, // '/'
{0x00,0x18,0x24,0x24,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0x24,0x24,0x18,0x00, 0x00}, //48 '0'
{0x00,0x08,0x18,0x28,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x3e,0x00, 0x00}, // '1'
……
};
这里是这个数组的局部,这是一个二维数组,他的size是[256][16],font_ascii[3]就代表ASCII码为3的字符的方块内容,其中一个数字代表一列,该数字的每一位代表一个像素是否进行填充。
如何移动光标并且打印文字
在上一段中,我们讲了单个字符是如何构成的,有了这个基础,就可以来学习怎么移动光标,并且打印单个文字了。
使用一个结构体来描述这些功能
在输出字符串的时候,需要对屏幕进行操作(实际上就是对用于显示的缓冲区进行操作),那么这个时候我们就想到了去建立一个"类"来描述这个过程,我们来看一下这个cursor类需要描述哪些东西:
- 屏幕的大小
- 光标的位置
- 每个字符所占的方块的尺寸
- 操作的缓冲区的起始地址以及长度
上面列出来的就是我们的缓冲区需要描述的属性,那么下一个问题,我们的光标在当前阶段需要进行哪些操作:
- 向后移动一位
- 模拟制表符操作
- 模拟回退操作
- 模拟换行操作
- 清空屏幕
- 输出一个字符
这是我所想到的,我们的缓冲区需要进行的操作,经过上面的思考后,我们的"类"就有了一个雏形(当然了,C语言没法面向对象,所以我们只能用变量+函数的形式来爽一下了):(这里我构建了一个程序position.h来描述相关的信息)
#ifndef __POSITION_H__
#define __POSITION_H__
struct Position
{
int x_resolution; // 屏幕行数
int y_resolution; // 屏幕列数
int x_position; // 当前光标左上角所在位置
int y_position; // 当前光标右上角所在位置
int x_char_size; // 每个字符所占位置的行数
int y_char_size; // 每个字符所占位置的列数
unsigned int * screen_buffer_base_address; // 显示缓冲区的首地址
unsigned long screen_buffer_length; // 显示缓冲区的长度
}Pos;
// 函数,给出一个描述屏幕的结构体,将光标后移一位
void DoNext(struct Position * cur_position);
// 函数,给出一个描述屏幕的结构体,在当前位置模拟换行操作
void DoEnter(struct Position * cur_position);
// 函数,给出一个描述屏幕的结构体,在当前位置模拟Backspace退格操作
void DoBackspace(struct Position * cur_position);
// 函数,给出一个描述屏幕的结构体,在当前位置模拟Tab制表符操作(制表符大小为8个空格)
void DoTab(struct Position * cur_position);
// 函数,给出一个描述屏幕的结构体,清空屏幕上所有的东西,并且将光标置为(0, 0)
void DoClear(struct Position * cur_position);
// 函数,给出一个描述屏幕的结构体,以及想要在当前位置输出的文字的背景颜色、文字颜色、文字格式在当前位置进行输出
void DoPrint(struct Position * cur_position,const int back_ground_color, const int font_color, const char* char_format);
#endif
各种方法的实现
接下来我们在position.c中,实现这些功能即可:
#include "position.h"
// 实现position中的一些函数
char* defaultFill = " ";
/**
* 给出当前的位置结构体,将光标移动到下一区域
* @param cur_position 一个指针,指向被操作的位置结构体
*/
void DoNext(struct Position* cur_position){
cur_position->y_position = cur_position->y_position + cur_position->y_char_size;
if (cur_position->y_position >= cur_position->y_resolution) DoEnter(cur_position); // 试探,如果错误,就直接重置
}
/**
* 给出当前的位置结构体,模拟回车时的操作
* @param cur_position 一个指针,指向被操作的位置结构体
*/
void DoEnter(struct Position * cur_position){
cur_position->y_position = 0;
cur_position->x_position = cur_position->x_position + cur_position->x_char_size; // 平移
if (cur_position->x_position >= cur_position->x_resolution) DoClear(cur_position); // 试探,如果错误,就直接重置
}
/**
* 给出当前的位置结构体,将光标置为(0, 0)[暂时不实现清空屏幕的功能]
* @param cur_position 一个指针,指向被操作的位置结构体
*/
void DoClear(struct Position * cur_position){
cur_position->x_position = 0;
cur_position->y_position = 0;
}
/**
* 给出当前的位置结构体,以及想要在当前位置输出的文字的背景颜色、文字颜色、文字格式在当前位置进行输出
* @param cur_position 一个指针,指向被操作的位置结构体
* @param back_ground_color 背景颜色
* @param font_color 字体颜色
* @param char_format 字体样式会根据字体样式进行颜色填充
*/
void DoPrint(struct Position * cur_position,const int back_ground_color, const int font_color, const char* char_format){
int row, col;
// 遍历每一个像素块,进行输出
for(row = cur_position->x_position; row < cur_position->x_position + cur_position->x_char_size; row ++){
for(col = cur_position->y_position; col < cur_position->y_position + cur_position->y_char_size; col ++){
int* pltAddr = cur_position->screen_buffer_base_address + cur_position->y_resolution * row + col; // 当前方块需要覆盖像素块的缓冲区地址
int groupId = row - cur_position->x_position; // 算出来在第几个char中
int memberNum = col - cur_position->y_position; // 算出来在该char中是第几位
char isFont = char_format[groupId] & (1 << (cur_position->y_char_size - memberNum)); // 判断该位是否为1
(*pltAddr) = isFont ? font_color : back_ground_color;
}
}
}
/**
* 给出当前的位置结构体,在当前位置模拟退格键[退格键不会将回车删除(也就是说,无论怎么退格,Y值都不会变)]
* @param cur_position 一个指针,指向被操作的位置结构体
*/
void DoBackspace(struct Position* cur_position){
// 先在当前位置画一个空格(把之前的字符覆盖掉) 画的时候背景是黑色
DoPrint(cur_position, 0x00000000, 0x00000000, defaultFill);
// 如果不是行的第一个,那么就减一个空位
cur_position->y_position = (cur_position->y_position - cur_position->y_char_size <= 0) ? 0 :
cur_position->y_position - cur_position->y_char_size;
}
/**
* 给出当前的位置结构体,在当前位置模拟输入一次制表符
* 这里无论如何都要做一次,然后直到对齐4位为止
* @param cur_position 一个指针,指向被操作的位置结构体
*/
void DoTab(struct Position * cur_position){
do{
DoNext(cur_position);
} while(((cur_position->y_position / cur_position->y_char_size) & 4) == 0);
}
这里按照惯例,来讲解一下代码,我终于摆脱了copy作者代码的阴影,开始自己创作了,下面我们来简单的讲一下这些函数:
-
DoNext:将位置向后移动一个方格,如果当前位置已经是行末,那么就调用DoEnter() -
DoEnter:将位置移动到下一行的行初,如果移动后超出了屏幕,就调用DoClear -
DoClear:将位置移动到左上角(暂时没有让他带有清空屏幕的功能) -
DoPrint:输出一个字符,在执行这个函数的过程中,有几个需要讲解的点:-
int* pltAddr = cur_position->screen_buffer_base_address + cur_position->y_resolution * row + col;:计算我们要覆盖的屏幕显示缓冲区内存地址。 -
char_format[groupId] & (1 << (cur_position->y_char_size - memberNum)):作者给出的字符表是反着的,他实际的作用如下: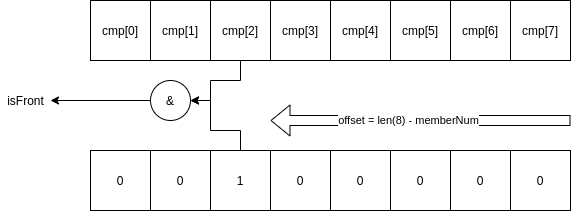
实际上就是对比当前位是否为0。
-
-
DoBackspace将当前的位置用黑色覆盖,然后将位置向前移动一个即可。 -
DoTab:无论何时使用TAB的时候,都会向后至少移动一格,基于这个理论,我们使用一个do-while()就可以非常容易解决了。后面写的判断,就是一个简易的膜4,对于CPU来说,按位与运算只需要一个时钟周期即可完成,而取余数运算是基于除法运算的,对于64位的cpu而言,最简单的除法操作需要64个时钟周期,就算用华莱士数+both来做优化,也需要让流水线停止等待很久,所以说,对于2^n形式的数字进行取余数,可以使用按位与的方式来判断其是否为0,这样可以极大地加快其运算速度。
对实现结果的验证
我们想要输出字符串,就直接连续调用这个函数即可
我们在main函数中,实例化一个结构体,并且调用一些打印的方法来验证一下我们的程序是否正确:
// 初始化屏幕
struct Position* myPos = &(struct Position){
SCREEN_ROW_LEN, SCREEN_COL_LEN, // 屏幕行列
0, 0, // 当前光标位置
CHAR_ROW_LEN, CHAR_COL_LEN, // 字符行列
COLOR_OUTPUT_ADDR, sizeof(int) * SCREEN_COL_LEN * SCREEN_ROW_LEN
};
DoClear(myPos);
int curChar;
for(curChar = 40; curChar < 130; curChar ++){ // 输出给出的表格中的每一个字符
DoPrint(myPos, 0xffffff00, 0x00000000, font_ascii[curChar]);
DoNext(myPos);
if (curChar % 10 == 0) {
if (curChar % 20 == 0) DoBackspace(myPos);
DoEnter(myPos);
if (curChar % 30 == 0) DoTab(myPos);
}
}
每输出10个字符输出一个换行符,每输出20个字符输出一个退格,每输出30个输出一个TAB,执行结果如下,完全无误:

输出带有格式化信息的字符串
-
首先,我们需要来复现一下使用场景,这里使用我们常用的
printf函数来做类比:printf("numa:%d\n", numa);我们来解读一下这个句子,首先,这个句子包括两个大的部分,前面是一个字符串,他表示我们最终需要输出的字符串,在这个字符串中,可能会有一些占位符,具体来说,这些占位符可能是基础的:
%d, %s, %c等等,也有可能是%06d这种的,当然,除此之外,这个字符串中可能还有一些较为特殊的字符,比如:\n, \t, \b这三个,他们分别表示回车、制表符、回退,这三个都无法直接输出,所以我们需要进行特殊的判断。综上所述,我们这个输出一行字的函数可以被拆分为两个阶段:
- 预处理:给出一个格式字符串如
"numa:%d\n"以及跟随的参数numa(这个参数的数量未知),对字符串进行解析,得到一个能够直接进行输出的字符串(相当于直接把后面的参数融合到字符串中)。 - 输出:读取预处理完毕的字符串,逐个字符进行输出,输出到屏幕上,这里的输出非常简单,只需要调用上面封装好的操作即可
- 预处理:给出一个格式字符串如
格式化字符串处理
这里就属于dirty work了,我直接就是一手copy(这里主要在做的工作就是解析字符串,然后来区分其中的%d,%.3f,%*d,这种的,然后再用后面的参数填充,这里我就不讲了,直接把作者的代码贴过来就可以了),当然,贴过来之前,我还是改了一下的,因为还需要适配我们写的显示模块:
#include
#include "printk.h"
#include "lib.h"
#include "linkage.h"
#include "position.h"
extern inline int strlen(char* String);
/**
* 给出一段字符串,将字符串转换为数字
* @param s 输入的字符串
* @return 返回的数字, 整数类型
*/
int SkipAtoi(const char **s)
{
int i=0;
while (IS_DIGIT(**s))
i = i*10 + *((*s)++) - '0';
return i;
}
/**
* 根据给出的参数,格式化输出一个数字
* @param str
* @param num
* @param base
* @param size
* @param precision
* @param type
* @return 一个字符串,格式化完成后的该数字
*/
static char * number(char * str, long num, int base, int size, int precision, int type)
{
char c,sign,tmp[50];
const char *digits = "0123456789ABCDEFGHIJKLMNOPQRSTUVWXYZ";
int i;
if (type&SMALL) digits = "0123456789abcdefghijklmnopqrstuvwxyz";
if (type&LEFT) type &= ~ZERO_PAD;
if (base < 2 || base > 36)
return 0;
c = (type & ZERO_PAD) ? '0' : ' ' ;
sign = 0;
if (type&SIGN && num < 0) {
sign='-';
num = -num;
} else
sign=(type & PLUS) ? '+' : ((type & SPACE) ? ' ' : 0);
if (sign) size--;
if (type & SPECIAL)
if (base == 16) size -= 2;
else if (base == 8) size--;
i = 0;
if (num == 0)
tmp[i++]='0';
else while (num!=0)
tmp[i++]=digits[DO_DIV(num,base)];
if (i > precision) precision=i;
size -= precision;
if (!(type & (ZERO_PAD + LEFT)))
while(size-- > 0)
*str++ = ' ';
if (sign)
*str++ = sign;
if (type & SPECIAL)
if (base == 8)
*str++ = '0';
else if (base==16)
{
*str++ = '0';
*str++ = digits[33];
}
if (!(type & LEFT))
while(size-- > 0)
*str++ = c;
while(i < precision--)
*str++ = '0';
while(i-- > 0)
*str++ = tmp[i];
while(size-- > 0)
*str++ = ' ';
return str;
}
/**
* 对给出的字符串进行初始化(识别占位符并且根据需求进行填入)
* @param saving_buffer 格式化后的字符串将返回到buf数组中
* @param format_string 一个字符串,表示需要进行格式化的字符串如:"numa : %06d !\n"
* @param args 用户输入的参数,用于对前面的字符串进行填充
* @return 格式化后字符串的结束位置
*/
int vsprintf(char * saving_buffer,const char *format_string, va_list args)
{
char * str,*s;
int flags;
int field_width;
int precision;
int len,i;
int qualifier; /* 'h', 'l', 'L' or 'Z' for integer fields */
for(str = saving_buffer; *format_string; format_string++)
{
if (*format_string != '%')
{
*str++ = *format_string;
continue;
}
flags = 0;
repeat:
format_string++;
switch(*format_string)
{
case '-':flags |= LEFT;
goto repeat;
case '+':flags |= PLUS;
goto repeat;
case ' ':flags |= SPACE;
goto repeat;
case '#':flags |= SPECIAL;
goto repeat;
case '0':flags |= ZERO_PAD;
goto repeat;
}
/* get field width */
field_width = -1;
if (IS_DIGIT(*format_string))
field_width = SkipAtoi(&format_string);
else if (*format_string == '*')
{
format_string++;
field_width = va_arg(args, int);
if (field_width < 0)
{
field_width = -field_width;
flags |= LEFT;
}
}
/* get the precision */
precision = -1;
if (*format_string == '.')
{
format_string++;
if (IS_DIGIT(*format_string))
precision = SkipAtoi(&format_string);
else if (*format_string == '*')
{
format_string++;
precision = va_arg(args, int);
}
if (precision < 0)
precision = 0;
}
qualifier = -1;
if (*format_string == 'h' || *format_string == 'l' || *format_string == 'L' || *format_string == 'Z')
{
qualifier = *format_string;
format_string++;
}
switch(*format_string)
{
case 'c':
if (!(flags & LEFT))
while(--field_width > 0)
*str++ = ' ';
*str++ = (unsigned char)va_arg(args, int);
while(--field_width > 0)
*str++ = ' ';
break;
case 's':
s = va_arg(args,char *);
if (!s)
s = '\0';
len = strlen(s);
if (precision < 0)
precision = len;
else if (len > precision)
len = precision;
if (!(flags & LEFT))
while(len < field_width--)
*str++ = ' ';
for(i = 0;i < len ;i++)
*str++ = *s++;
while(len < field_width--)
*str++ = ' ';
break;
case 'o':
if (qualifier == 'l')
str = number(str,va_arg(args,unsigned long),8,field_width,precision,flags);
else
str = number(str,va_arg(args,unsigned int),8,field_width,precision,flags);
break;
case 'p':
if (field_width == -1)
{
field_width = 2 * sizeof(void *);
flags |= ZERO_PAD;
}
str = number(str,(unsigned long)va_arg(args,void *),16,field_width,precision,flags);
break;
case 'x':
flags |= SMALL;
case 'X':
if (qualifier == 'l')
str = number(str,va_arg(args,unsigned long),16,field_width,precision,flags);
else
str = number(str,va_arg(args,unsigned int),16,field_width,precision,flags);
break;
case 'd':
case 'i':
flags |= SIGN;
case 'u':
if (qualifier == 'l')
str = number(str,va_arg(args,unsigned long),10,field_width,precision,flags);
else
str = number(str,va_arg(args,unsigned int),10,field_width,precision,flags);
break;
case 'n':
if (qualifier == 'l')
{
long *ip = va_arg(args,long *);
*ip = (str - saving_buffer);
}
else
{
int *ip = va_arg(args,int *);
*ip = (str - saving_buffer);
}
break;
case '%':
*str++ = '%';
break;
default:
*str++ = '%';
if (*format_string)
*str++ = *format_string;
else
format_string--;
break;
}
}
*str = '\0';
return str - saving_buffer;
}
char saving_buffer[500];
/**
* 给出颜色与需要输出的东西,进行输出
* @param FRcolor 一个整形数字,表示想要输出的字体颜色
* @param BKcolor 一个整形数字,表示想要输出的背景颜色
* @param format_string 一个字符串,表示用户输出的字符串
* @param ... 可变长的参数列表,表示想要填充到字符串中的参数
*/
int color_printk(unsigned int FRcolor,unsigned int BKcolor,const char * format_string,...)
{
int i = 0;
int count = 0;
int line = 0;
va_list args;
va_start(args, format_string);
i = vsprintf(saving_buffer,format_string, args);
va_end(args);
for(count = 0;count < i;count++)
{
if (saving_buffer[count] == '\n') DoEnter(&global_position);
else if (saving_buffer[count] == '\b') DoBackspace(&global_position);
else if (saving_buffer[count] == '\t') DoTab(&global_position);
else DoPrint(&global_position, BKcolor, FRcolor, font_ascii[saving_buffer[count]]);
DoNext(&global_position);
}
return i;
}
我们调用这个color_printk:
DoEnter(&global_position);
color_printk(YELLOW,BLACK,"Hello World!");
DoEnter(&global_position);
效果如下:

关键点1:多文件共享全局变量(讲给和我一样没学好C语言的人)
作者给出的文件的写法上存在一些错误(或者说是不规范的地方),比如我们在多个地方#include"font.h"之后,就会有multiple define的错误,经过上面的讲解,相信大家也能分析出来出现这样错误的原因:
- 文件A调用了
font.h - 文件B也调用了
font.h - 预编译、汇编、二进制 文件A,在这个过程中,没有任何错误,并且预编译文件A时已经复制了
font.h中的内容 - 同理,预编译B的时候也复制了
font.h中的内容 - 最后一步:链接,这个时候就不对了,A/B都定义了
font_ascii这个字符数组,那怎么办呢?报错吧
好了,这样就启示我们,不要在.h文件中定义数据。那问题就来了,不在.h中定义,怎么做到#include后开箱即用呢?其实也很简单,我们需要在一个.c文件中定义想要全局使用的变量(如font_ascii),然后再在.h文件中使用关键字extern引入该变量即可,我们来看一下在这个项目中,是如何使用这个方法的:
font.c
unsigned char font_ascii[256][16] = ......; // 定义数据
font.h
#ifndef __FONT_H__
#define __FONT_H__
extern unsigned char font_ascii[256][16];
#endif
其实如果用户#include"font.h",实际上就是使用了关键词extern unsigned char font_ascii[256][16];,来声明要使用这个全局变量。编译的时候,实际上编译器通过extern关键词知道我们要使用 font_ascii这个字符数组,但是实际上编译器是不知道font_ascii在哪里的。但是到了链接的时候,由于我们把font.c这个文件一起加进来编译了,所以程序执行的时候能够知道font_ascii的值。
关键点2:可变长参数
作者的程序中,#include 是引入了一个库,这个库的主要作用是:他可以让函数能够接收未知数量的变量,那么什么是未知数量的变量呢?
printf("%d,%d,%c\n", numa, numb, charc);
我们来分析一下printf这个函数的构成:首先是一个字符串"%d,%d,%c\n",然后后面会根据字符串中的占位符的数量跟上很多变量,也就是说:在写程序的时候不知道后面会跟多少参数,那么就可用这个库来解决这个问题,在这个程序中我们将color_printk声明成下面的样子:
int color_printk(unsigned int FRcolor,unsigned int BKcolor,const char * format_string,...)
这里的format_string就相当于printf中的字符串,后面的...就是未知的参数了,我们来看下如何使用这个库:
va_list args;:创建一个 va_list 类型变量va_start(args, format_string):给出上一个参数的位置,将args指向第一个可变参数va_arg(args, int):取出下一个int类型的参数va_end(vl);:结束标志
可变长参数的原理
这里我们还是来阅读下源码:
#define va_start(AP, LASTARG) \
(AP = ((char *) &(LASTARG) + __va_rounded_size (LASTARG)))//ap指向下一个参数,lastarg不变
这个地方,我们给出的va_list就对应这里的ap,给出的上一个参数format_string就对应着这里的LASTARG,这里的含义是:va_list的第一个元素的内存地址是上一个参数的内存地址+__va_rounded_size (LASTARG)。其中__va_rounded_size (LASTARG):
#define __va_rounded_size(TYPE) \
(((sizeof (TYPE) + sizeof (int) - 1) / sizeof (int)) * sizeof (int))
那么为什么这样就能指向va_list的首地址了呢?其实非常简单,我们不妨想一下函数入栈的操作:从右到左依次入栈;也就是说这些参数在内存中是线性排列的。那就是说:只要我们知道va_list前的第一个元素的地址,那么我们就不难知道va_list的地址了。
同理,我们想找到va_list下一个元素的位置也是非常简单,我们只需要知道这次想要读取的元素占了内存中多少个字节即可。
系统异常
首先通过以往的经验来谈一下什么是异常:(谈这些的时候都是基于对mips32架构的理解,而不是x86,所以和这个项目可能有些不同):
异常可能来源于中断、陷阱、系统调用、无效指令、溢出等等等等,简而言之就是如果执行到当前出现了cpu无法解决的问题的时候就会抛出异常;这里需要特别注意的是:异常是由cpu抛出的,操作系统进行处理的;在mips中,cpu检测到异常后,会将流水线停掉,将异常信息记录到cp0寄存器中,然后跳转到异常处理例程。异常处理例程是由操作系统来决定的,该例程所在内存地址是约定俗成的(固定的,必须装载在固定位置)。
异常的分类
作者给出了一些描述:
- 错误(fault)。错误是一种可被修正的异常。只要错误被修正,处理器可将程序或任务的运行环境还原至异常发生前(已在栈中保存CS和EIP寄存器值),并重新执行产生异常的指令,也就是说异常的返回地址指向产生错误的指令,而不是其后的位置。
- 陷阱(trap)。陷阱异常同样允许处理器继续执行程序或任务,只不过处理器会跳过产生异常的指令,即陷阱异常的返回地址指向诱发陷阱指令之后的地址。
- 终止(abort)。终止异常用于报告非常严重的错误,它往往无法准确提供产生异常的位置,同时也不允许程序或任务继续执行,典型的终止异常有硬件错误或系统表存在不合逻辑、非法值。
当终止异常产生后,程序现场不可恢复,也无法继续执行。当错误异常和陷阱异常产生后,程序现场可以恢复并继续执行,只不过错误异常会重新执行产生异常的指令,而陷阱异常会跳过产生异常的指令。
除此之外,还有一个异常的分类表:
| 向量号 | 助记符 | 异常/中断描述 | 异常/中断类型 | 错误码 | 触发源 |
|---|---|---|---|---|---|
| 0 | #DE | 除法错误 | 错误 | No | DIV或IDIV指令 |
| 1 | #DB | 调试异常 | 错误/陷阱 | No | 仅供Intel处理器使用 |
| 2 | — | NMI中断 | 中断 | No | 不可屏蔽中断 |
| 3 | #BP | 断点异常 | 陷阱 | No | INT 3指令 |
| 4 | #OF | 溢出异常 | 陷阱 | No | INTO指令 |
| 5 | #BR | 越界异常 | 错误 | No | BOUND指令 |
| 6 | #UD | 无效/未定义的机器码 | 错误 | No | UD2指令或保留的机器码 |
| 7 | #NM | 设备异常(FPU不存在) | 错误 | No | 浮点指令WAIT/FWAIT指令 |
| 8 | #DF | 双重错误 | 终止 | Yes(Zero) | 任何异常、NMI中断或INTR中断 |
| 9 | — | 协处理器段越界(保留) | 错误 | No | 浮点指令 |
| 10 | #TS | 无效的TSS段 | 错误 | Yes | 访问TSS段或任务切换 |
| 11 | #NP | 段不存在 | 错误 | Yes | 加载段寄存器或访问系统段 |
| 12 | #SS | SS段错误 | 错误 | Yes | 栈操作或加载栈段寄存器SS |
| 13 | #GP | 通用保护性异常 | 错误 | Yes | 任何内存引用和保护检测 |
| 14 | #PF | 页错误 | 错误 | Yes | 任何内存引用 |
| 15 | — | Intel保留,请勿使用 | — | No | — |
| 16 | #MF | x87 FPU错误(计算错误) | 错误 | No | x87 FPU浮点指令或WAIT/FWAIT指令 |
| 17 | #AC | 对齐检测 | 错误 | Yes(Zero) | 引用内存中的任何数据 |
| 18 | #MC | 机器检测 | 终止 | No | 如果有错误码,其与CPU类型有关 |
| 19 | #XM | SIMD浮点异常 | 错误 | No | SSE/SSE2/SSE3浮点指令 |
| 20 | #VE | 虚拟化异常 | 错误 | No | 违反EPT |
| 21-31 | — | Intel保留,请勿使用 | — | — | — |
| 32-255 | — | 用户自定义中断 | 中断 | — | 外部中断或执行INT n指令 |
当发生异常的时候,我们就可以通过向量号来知道异常的类型,同时通过错误码来检测异常的原因。
预备知识1:IDT表&中断门
参考:《编写操作系统之路》

在前面的学习中,IDT表已经多次出现了,我们每次都在对IDT表进行定义,以及使用lidt指令对IDT表进行更新、读取,但我们根本不知道它是干什么的。它的学名叫做中段描述符表。在IDT表中保存的是一个个“门”,那么每一个门中都保存着很多信息,在这些信息中最为关键的(我们需要理解的)就是:
- 选择子:就是段选择子
- 偏移:在相应段中的偏移地址
这个门可以被分为:中断门、调用门、陷阱门、任务门,为了方便理解,我们从调用门开始学起。
- 调用门:调用门非常简单,他的作用就是被调用,方法是
call 调用门,在执行这样的语句的时候实际上就是在做call 选择子:偏移,这个过程就等同于调用一个函数,但是于直接调用函数不同,使用调用门可以实现从低特权级到高特权级的转移。比如说:想要从用户模式的代码B调用搞特权级的A,如果直接call,那么就会出现错误(保护模式特性),这个时候使用调用门就可以解决这个问题。 - 中断门:中断门和调用门基本相同,唯一的不同点在于在使用中断门时,系统会自动屏蔽掉其他中断
预备知识2:特权级转换实现
参考:
- 《编写操作系统之路》
- 总结:特权级之间的转换
段内跳转
首先我们来看一下最简单的函数跳转(段内跳转):
; 调用函数
push eax ; 压入参数2
push ebx ; 压入参数1
call function ; 调用
; 被调用的函数
function:
mov ebx, [esp + 4] ; 取出参数1
mov ebx, [esp + 8] ; 取出参数2
...
ret ; 返回
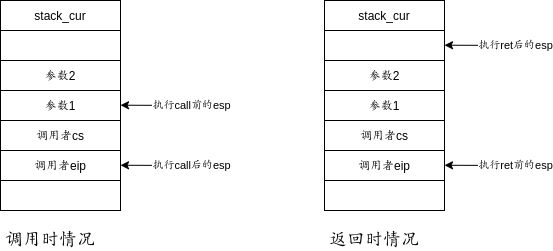
这个过程应当是大家熟悉的,我们将参数压栈的顺序和取出参数的顺序应该是相反的,这是栈的基本特征。但是同时产生了一个问题:为什么取出最后一个push进去的参数需要+4呢?
- 这是因为我们在使用
call的时候,处理器默认将下一条需要执行的指令的地址也压入了栈中,这样在执行ret结束函数时,可以直接使用栈中的地址进行跳转,来达到继续执行的目的。而这个过程对于用户来说是不可见的。
段内跳转前后的栈内存如下:
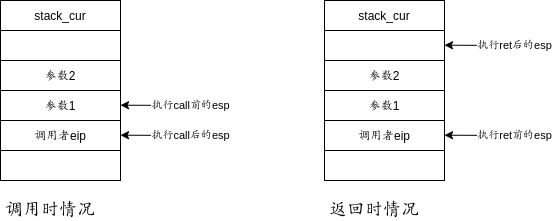
段间跳转(特权级相同)
上面所讲述的跳转方法是段内跳转的方法。下面我们来看一下段间跳转,首先来看一张图,这张图表示的是长调用且不发生特权级转移时堆栈的变化:
可以看到,唯一的区别在于长跳转的时候,不仅保存了偏移,还保存了段选择符号,以便回到不同段的代码处继续执行。
段间转换(特权级不同)
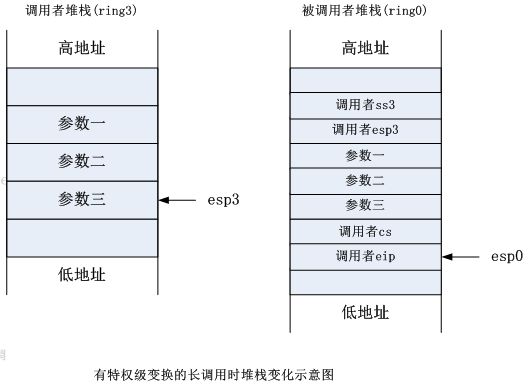
首先需要说明的是,如果需要在不同特权级的段之间进行跳转的话,那么是不可以直接使用call +地址的形式来进行跳转的。而是需要使用我们上面说的各种门描述符来进行跳转,使用的方法就是:call gate,这样的方法就能在不同特权级的代码段之间切换了。那么我们来看,如何切换:
在不同特权级下的堆栈段不同,所以每一个任务最多可能在4个特权级间转移,所以,每个任务实际上需要4个堆栈。那么我们就遇到了第一个问题:如何保存不同特权级下的堆栈?
其实解决方法非常简单,因为intel已经给我们提供好了,我们使用一个叫做TSS的表格来存储cpu当前运行时的很多状态,其中的一项就是我们这里需要存储的:不同栈的ss和esp,需要注意的是,特权级0,1的都保存在tss段 ,是只读的。只有在访问更高特权级的时候,才会创建新的堆栈,同时在调用结束的时候,相应的堆栈也会被销毁,以供下一次调用。
我们来看一下调用前后栈的变化:
返回时:
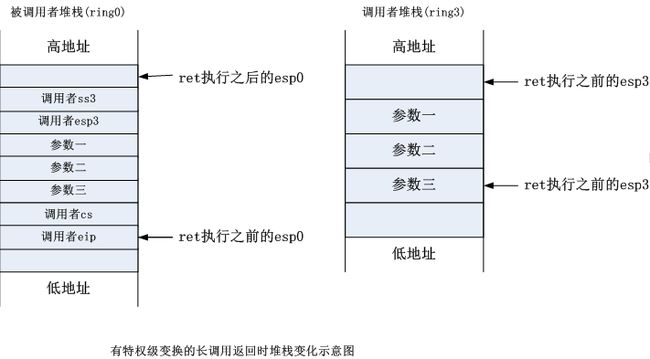
现在,我们面临着最后一个问题:中间需要的很多信息从哪里来?
其实这个问题也很简单。。我们上面不是讲了一个门嘛,门里面含有两个Byte专门用于储存目标代码段的一些属性,比如参数数量等等。
最后我们总结一下在进行特权级切换时的流程:
- 从门中获得目标的特权级,来让TSS知道该切换到哪个ss和esp
- 从TSS中读取新的ss和esp
- 对ss进行校验(如果不存在就会爆出异常)
- 暂时保存这个时候的ss:esp,也就是调用者的ss,esp
- 加载新的ss、esp
- 将刚才保存的ss、esp加载到栈中
- 将调用者堆栈中的参数拷贝到新的栈中,其中参数的数量由门中属性区域的Param Count来决定,最多只有31个参数
- 将当前调用者的cs:eip压栈。
- 加载门中指定的
cs:eip,开始执行新的代码,这样就完成了特权级变化的跳转
虽然这个过程很复杂, 但是它的原理很简单,如果你没有看懂也没有关系,你可以去网上搜索其他人的讲解。这个过程实际上是被intel公司封装好了的,我们只需要懂它的大概原理就可以进行使用了。下面一节的内容可能与现在的内容有部分重复。
预备知识3:中断处理过程(摘自《一个六十四位操作系统的设计与实现》有部分改动)
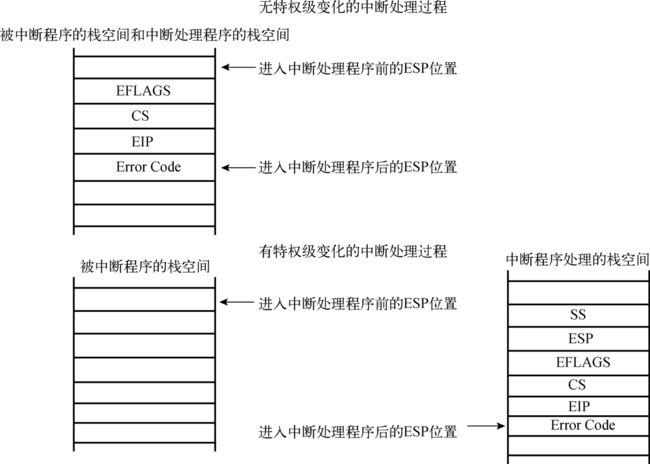
我们观察到上面的每一种异常/中断,都对应这样一个向量,发生中断时会用到之前定义过的IDT中段描述符表,来检索相应的门描述符,然后再通过地址映射的方法,找到中断处理例程的代码段的地址,最后转移到目标地址进行执行,整个过程如下图所示:

当发生中断时,会检测产生中断的程序的特权级,并且与代码寄存器的特权级进行比较:
-
如果中断/异常处理程序的特权级更高,则会在中断/异常处理程序执行前切换栈空间,以下是栈空间的切换过程:
(1) 处理器会从任务状态段TSS中取出对应特权级的栈段选择子和栈指针,并将它们作为中断/异常处理程序的栈空间进行切换。在栈空间切换的过程中,处理器将自动把切换前的SS和ESP寄存器值压入中断/异常处理程序栈。
(2) 在栈空间切换的过程中,处理器还会保存被中断程序的EFLAGS、CS和EIP寄存器值到中断/异常处理程序栈。
(3) 如果异常会产生错误码,则将其保存在异常栈内,位于EIP寄存器之后。
-
如果中断/异常处理程序的特权级与代码段寄存器的特权级相等。
(1) 处理器将保存被中断程序的EFLAGS、CS和EIP寄存器值到栈中(如图4-7所示)。
(2) 如果异常会产生错误码,则将其保存在异常栈内,位于EIP寄存器之后。
处理器必须借助
IRET指令才能从异常/中断处理程序返回。 -
异常/中断处理的标志位使用。当处理器穿过中断门或陷阱门执行异常/中断处理程序时,处理器会在标志寄存器EFLAGS入栈后复位TF标志位,以关闭单步调试功能。(处理器还会复位VM、RF和NT标志位。)在执行
IRET指令的过程中,处理器会还原被中断程序的标志寄存器EFLAGS,进而相继还原TF、VM、RF和NT等标志位。中断门与陷阱门的不同之处在于执行处理程序时对IF标志位(位于标志寄存器EFLAGS中)的操作。
- 当处理器穿过中断门执行异常/中断处理程序时,处理器将复位IF标志位,以防止其他中断请求干扰异常/中断处理程序。处理器会在随后执行
IRET指令时,将栈中保存的EFLAGS寄存器值还原,进而置位IF标志位。 - 当处理器穿过陷阱门执行异常/中断处理程序时,处理器却不会复位IF标志位。
其实,中断和异常向量同在一张IDT内,只是它们的向量号不同罢了。IDT表的前32个向量号被异常占用,而且每个异常的向量号固定不能更改,从向量号32开始被中断处理程序所用。
- 当处理器穿过中断门执行异常/中断处理程序时,处理器将复位IF标志位,以防止其他中断请求干扰异常/中断处理程序。处理器会在随后执行
检测除法错误
通过上面的学习,我们已经掌握了这部分的基本原理,接下来我们通过看作者代码+自己写的方法来进行应用。
初始化IDT表格
回顾下总体的过程,在发生异常的时候,cpu会拿着异常向量在IDT表格中进行查找,将代码跳转到相应的表项记录的地址。所以我们就需要对IDT表格进行初始化,给每一个异常号分配一个异常处理例程。这个过程非常好理解。
setup_IDT:
leaq ignore_int(%rip), %rdx
movq $(0x08 << 16), %rax
movw %dx, %ax
movq $(0x8E00 << 32), %rcx
addq %rcx, %rax
movl %edx, %ecx
shrl $16, %ecx
shlq $48, %rcx
addq %rcx, %rax
shrq $32, %rdx
leaq idt_table(%rip), %rdi
mov $256, %rcx
rp_sidt:
movq %rax, (%rdi)
movq %rdx, 8(%rdi)
addq $0x10, %rdi
dec %rcx
jne rp_sidt
我认为,我们不需要再去单句单句的去理解这段汇编干了什么了,因为说实话。。不是很有意义,我们的重点应该放在这段代码达到了什么目的上面。简单说,这段代码改变了IDT表的值,对IDT表进行了初始化,将idt表的每一项都填上了相同的值,这个值的意思是,当前门会跳转到这个ignore_int函数中进行处理,那么他是怎么实现的呢?(我还是会讲,就是不要太在意单个语句的作用,当前阶段学x86投入产出有点低):
- 首先,在
setup_IDT中,我们定义了一个标准的门(这个门会跳转到ignore_int函数) - 然后,获取了IDT表的地址
leaq idt_table(%rip), %rdi - 最后,使用循环,每次覆盖IDT表的一项,覆盖256次(这是因为IDT表格一共有256个条目【为什么有256条目?没为什么!】)
- 每执行完一次循环,就会自减
dec %rcx,直到覆盖完成后结束:jne rp_sidt。
初始化TSS
我们接着回忆过程,在跳转的时候,我们需要使用TSS来保存、切换状态,那么我们在这里需要给TSS一个初始的状态(TSS也需要初始化)
setup_TSS64:
leaq TSS64_Table(%rip), %rdx
xorq %rax, %rax
xorq %rcx, %rcx
movq $0x89, %rax
shlq $40, %rax
movl %edx, %ecx
shrl $24, %ecx
shlq $56, %rcx
addq %rcx, %rax
xorq %rcx, %rcx
movl %edx, %ecx
andl $0xffffff, %ecx
shlq $16, %rcx
addq %rcx, %rax
addq $103, %rax
leaq gdt_table(%rip), %rdi
movq %rax, 64(%rdi)
shrq $32, %rdx
movq %rdx, 72(%rdi)
mov $0x40, %ax
ltr %ax
movq go_to_kernel(%rip), %rax /* movq address */
pushq $0x08
pushq %rax
lretq
这部分程序负责初始化GDT(IA-32e模式)内的TSS Descriptor,并通过LTR汇编指令把TSS Descriptor的选择子加载到TR寄存器中。
异常处理模块
其实我觉得,前面两个部分,知道有这么个东西就可以了,这里才是重要的地方。
//======= ignore_int
ignore_int:
cld
pushq %rax
pushq %rbx
pushq %rcx
pushq %rdx
pushq %rbp
pushq %rdi
pushq %rsi
pushq %r8
pushq %r9
pushq %r10
pushq %r11
pushq %r12
pushq %r13
pushq %r14
pushq %r15
movq %es, %rax
pushq %rax
movq %ds, %rax
pushq %rax
movq $0x10, %rax
movq %rax, %ds
movq %rax, %es
leaq int_msg(%rip), %rax /* leaq get address */
pushq %rax
movq %rax, %rdx
movq $0x00000000, %rsi
movq $0x00ff0000, %rdi
movq $0, %rax
callq color_printk
addq $0x8, %rsp
Loop:
jmp Loop
popq %rax
movq %rax, %ds
popq %rax
movq %rax, %es
popq %r15
popq %r14
popq %r13
popq %r12
popq %r11
popq %r10
popq %r9
popq %r8
popq %rsi
popq %rdi
popq %rbp
popq %rdx
popq %rcx
popq %rbx
popq %rax
iretq
int_msg:
.asciz "Unknown interrupt or fault at RIP\n"
到此为止,我们就完成了对异常的监听,并且进行简单的处理(过于简单,直接输出提示,并且宕机),向main函数中加入int a = 1 / 0,获得以下结果:

完善异常处理
添加门
现在给出一段代码,这段代码可以添加一个门:
#define _set_gate(gate_selector_addr,attr,ist,code_addr) \
do \
{ unsigned long __d0,__d1; \
__asm__ __volatile__ ( "movw %%dx, %%ax \n\t" \
"andq $0x7, %%rcx \n\t" \
"addq %4, %%rcx \n\t" \
"shlq $32, %%rcx \n\t" \
"addq %%rcx, %%rax \n\t" \
"xorq %%rcx, %%rcx \n\t" \
"movl %%edx, %%ecx \n\t" \
"shrq $16, %%rcx \n\t" \
"shlq $48, %%rcx \n\t" \
"addq %%rcx, %%rax \n\t" \
"movq %%rax, %0 \n\t" \
"shrq $32, %%rdx \n\t" \
"movq %%rdx, %1 \n\t" \
:"=m"(*((unsigned long)(gate_selector_addr))), \
"=m"(*(1 + (unsigned long *)(gate_selector_addr
))),"=&a"(__d0), "=&d"(__d1) \
:"i"(attr << 8), \
"3"((unsigned long *)(code_addr)),"2"(0x8 <<
16),"c"(ist) \
:"memory" \
); \
}while(0)
实际上我们不需要理解这段代码到底是怎么运作的,我们需要知道的重点是:
- 定义的方法:
define,当我们输入_set_gate的时候,实际上就是将下面的代码全都复制进来了。 - 执行的参数:
- gate_selector_addr:对应的IDT表的向量号
- attr: 添加到IDT中的项目的类型(陷阱、中断、系统调用)
- ist: 用于填充TSS中的内容
- code_addr:跳转到的目标地址
- 执行的结果:系统遇到中断的时候,会使用中断向量进行检索IDT表,向我们已经定义好的目标地址进行带权跳转。
对添加门的代码进行二次封装
我们在这里对添加门的代码进行二次封装:
/**
* 创建陷阱门
* @param n 对应的IDT表的条目号
* @param ist 用于填充TSS
* @param addr 跳转的目标地址,需要传递一个函数指针
*/
inline void set_intr_gate(unsigned int n,unsigned char ist,void * addr)
{
_set_gate(idt_table + n , 0x8E , ist , addr); //P,DPL=0,TYPE=E
}
/**
* 创建一个陷阱门
* @param n 对应的IDT表的条目号
* @param ist 用于填充TSS
* @param addr 跳转的目标地址,需要传递一个函数指针
*/
inline void set_trap_gate(unsigned int n,unsigned char ist,void * addr)
{
_set_gate(idt_table + n , 0x8F , ist , addr); //P,DPL=0,TYPE=F
}
/**
* 创建一个DPL为3的陷阱门
* @param n 对应的IDT表的条目号
* @param ist 用于填充TSS
* @param addr 跳转的目标地址,需要传递一个函数指针
*/
inline void set_system_gate(unsigned int n,unsigned char ist,void * addr)
{
_set_gate(idt_table + n , 0xEF , ist , addr); //P,DPL=3,TYPE=F
}
/**
* 创建一个DPL是0的中断门
* @param n 对应的IDT表的条目号
* @param ist 用于填充TSS
* @param addr 跳转的目标地址,需要传递一个函数指针
*/
inline void set_system_intr_gate(unsigned int n,unsigned char ist,void * addr) //Int3Entry
{
_set_gate(idt_table + n , 0xEE , ist , addr); //P,DPL=3,TYPE=E
}
这样就可以更加方便的添加各种门了。对应的门的类型已经在代码中注明。
在这里有一个小的细节,我们还是需要讲一下的,我们在当前这个gate.h文件中写了这样的代码,尽心了一些变量类型的定义与声明:
struct GDTDescribeStruct
{
unsigned char a_byte[8];
};
struct IDTGateStruct
{
unsigned char a_byte[16];
};
extern struct GDTDescribeStruct gdt_table[];
extern struct IDTGateStruct idt_table[];
extern unsigned int TSS64_Table[26];
可以看到,这里我们使用了一个gdt_table,但是我们并没有在.c文件中进行定义,这是因为我们之前在head文件中的.global之中进行了定义,定义时的代码段如下:
.section .data
.globl gdt_table
gdt_table:
.quad 0x0000000000000000 /*0 NULL descriptor 00*/
.quad 0x0020980000000000 /*1 KERNEL Code 64-bit Segment 08*/
.quad 0x0000920000000000 /*2 KERNEL Data 64-bit Segment 10*/
.quad 0x0020f80000000000 /*3 USER Code 64-bit Segment 18*/
.quad 0x0000f20000000000 /*4 USER Data 64-bit Segment 20*/
.quad 0x00cf9a000000ffff /*5 KERNEL Code 32-bit Segment 28*/
.quad 0x00cf92000000ffff /*6 KERNEL Data 32-bit Segment 30*/
.fill 10,8,0 /*8 ~ 9 TSS (jmp one segment <7>) in long-mode 128-bit 40*/
GDT_END:
这样的定义方法,实际上和我们上一节中说的在.c文件中声明全局变量,然后再在.h文件中使用extern关键词进行引入相同。
添加各种门
在这一节中,我们会看一下作者是如何添加各种门的
作者给了我们一种实现的方法:
#include "trap.h"
void SystemInterruptVectorInit()
{
set_trap_gate(0,1,DivideErrorEntry);
set_trap_gate(1,1,DebugEntry);
set_intr_gate(2,1,NMIEntry);
set_system_gate(3,1,Int3Entry);
set_system_gate(4,1,OverflowEntry);
set_system_gate(5,1,BoundsEntry);
set_trap_gate(6,1,UndefinedOpcodeEntry);
set_trap_gate(7,1,DevNotAvailableEntry);
set_trap_gate(8,1,DoubleFaultEntry);
set_trap_gate(9,1,CoprocessorSegmentOverrunEntry);
set_trap_gate(10,1,InvalidTSSEntry);
set_trap_gate(11,1,SegmentNotPresentEntry);
set_trap_gate(12,1,StackSegmentFaultEntry);
set_trap_gate(13,1,GeneralProtectionEntry);
set_trap_gate(14,1,PageFaultEntry);
//15 Intel reserved. Do not use.
set_trap_gate(16,1,x87FPUErrorEntry);
set_trap_gate(17,1,AlignmentCheckEntry);
set_trap_gate(18,1,MachineCheckEntry);
set_trap_gate(19,1,SIMDExceptionEntry);
set_trap_gate(20,1,VirtualizationExceptionEntry);
//set_system_gate(SYSTEM_CALL_VECTOR,7,system_call);
}
同理,需要在trap.h之中预定义各种各样的处理函数:
#ifndef __TRAP_H__
#define __TRAP_H__
#include "linkage.h"
#include "printk.h"
#include "lib.h"
/*
*/
void DivideErrorEntry();
void DebugEntry();
void NMIEntry();
void Int3Entry();
void OverflowEntry();
void BoundsEntry();
void UndefinedOpcodeEntry();
void DevNotAvailableEntry();
void DoubleFaultEntry();
void CoprocessorSegmentOverrunEntry();
void InvalidTSSEntry();
void SegmentNotPresentEntry();
void StackSegmentFaultEntry();
void GeneralProtectionEntry();
void PageFaultEntry();
void x87FPUErrorEntry();
void AlignmentCheckEntry();
void MachineCheckEntry();
void SIMDExceptionEntry();
void VirtualizationExceptionEntry();
/*
*/
void SystemInterruptVectorInit();
#endif
在这里,我们定义了一些参数的偏移量:
entry.S
#include "linkage.h"
R15 = 0x00
R14 = 0x08
R13 = 0x10
R12 = 0x18
R11 = 0x20
R10 = 0x28
R9 = 0x30
R8 = 0x38
RBX = 0x40
RCX = 0x48
RDX = 0x50
RSI = 0x58
RDI = 0x60
RBP = 0x68
DS = 0x70
ES = 0x78
RAX = 0x80
FUNC = 0x88
ERRCODE = 0x90
RIP = 0x98
CS = 0xa0
RFLAGS = 0xa8
OLDRSP = 0xb0
OLDSS = 0xb8
这里定义的函数会在汇编中实现,实现方法如下:
ENTRY(DebugEntry)
pushq $0
pushq %rax
leaq DoDebug(%rip), %rax
xchgq %rax, (%rsp)
jmp error_code
这里的ENTRY是一个宏定义,是在linkage.h之中定义的,定义方法如下:
#define SYMBOL_NAME(X) X
#define SYMBOL_NAME_STR(X) #X
#define SYMBOL_NAME_LABEL(X) X##:
#define ENTRY(name) \
.global SYMBOL_NAME(name); \
SYMBOL_NAME_LABEL(name)
这个ENTERY实际上就是一个声明全局函数的方法。
在这个叫做DebugEntry的函数的最后,会进入到error_code这个代码段,改代码段如下:
error_code:
pushq %rax
movq %es, %rax
pushq %rax
movq %ds, %rax
pushq %rax
xorq %rax, %rax
pushq %rbp
pushq %rdi
pushq %rsi
pushq %rdx
pushq %rcx
pushq %rbx
pushq %r8
pushq %r9
pushq %r10
pushq %r11
pushq %r12
pushq %r13
pushq %r14
pushq %r15
cld
movq ERRCODE(%rsp), %rsi
movq FUNC(%rsp), %rdx
movq $0x10, %rdi
movq %rdi, %ds
movq %rdi, %es
movq %rsp, %rdi
GET_CURRENT(%ebx)
callq *%rdx
jmp ret_from_exception
可以看到,这个代码段实际上就是把各种寄存器的状态push到了栈中,然后调用了相应的方法,调用方法结束后跳转到ret_from_exception代码段进行复原,复原的代码段定义如下:
ret_from_exception:
/*GET_CURRENT(%ebx) need rewrite*/
ENTRY(ResetFromInterrupt)
jmp RESTORE_ALL /*need rewrite*/
而RESTORE_ALL就像下面一样:它的作用也非常简单,就是把各种push进来的都pop出去即可
RESTORE_ALL:
popq %r15;
popq %r14;
popq %r13;
popq %r12;
popq %r11;
popq %r10;
popq %r9;
popq %r8;
popq %rbx;
popq %rcx;
popq %rdx;
popq %rsi;
popq %rdi;
popq %rbp;
popq %rax;
movq %rax, %ds;
popq %rax;
movq %rax, %es;
popq %rax;
addq $0x10, %rsp;
iretq;
所以说,在整个过程中,汇编语言执行的是:将现场压入栈中,调用C语言函数进行处理、等待函数执行完毕、恢复现场的作用。我们来看一下div的异常处理:
void DoDivideError(unsigned long rsp,unsigned long error_code)
{
unsigned long * p = NULL;
p = (unsigned long *)(rsp + 0x98);
color_printk(RED,BLACK,"DoDivideError(0),ERROR_CODE:%#018lx,RSP:%#018lx,RIP:%#018lx\n",error_code , rsp , *p);
while(1){
// Endless loop
continue;
}
}
这个处理方式也是非常简单的,就是直接将错误的信息输出了。
同理,我们再来看一个:
ENTRY(InvalidTSSEntry)
pushq %rax
leaq DoInvalidTSS(%rip), %rax
xchgq %rax, (%rsp)
jmp error_code
这个与前面的DebugEntry有一些区别,区别在于:InvalidTSSEntry是一个有返回错误码的中断,intel的cpu直接隐式的帮助我们将错误码push到栈中了,所以我们就不需要重复push了,我们之前的时候push 0 实际上就是将error_code置为了0.
最后,我们来看一个特殊的(唯一一个特殊的):
ENTRY(NMIEntry)
pushq %rax
cld;
pushq %rax;
pushq %rax
movq %es, %rax
pushq %rax
movq %ds, %rax
pushq %rax
xorq %rax, %rax
pushq %rbp;
pushq %rdi;
pushq %rsi;
pushq %rdx;
pushq %rcx;
pushq %rbx;
pushq %r8;
pushq %r9;
pushq %r10;
pushq %r11;
pushq %r12;
pushq %r13;
pushq %r14;
pushq %r15;
movq $0x10, %rdx;
movq %rdx, %ds;
movq %rdx, %es;
movq $0, %rsi
movq %rsp, %rdi
callq DoNMI
jmp RESTORE_ALL
#NMI不可屏蔽中断不是异常,而是一个外部中断,从而不会生成错误码。#NMI应该执行中断处理过程,这段程序最后会跳转到DoNMI函数进行处理。了解了我们处理函数的入口后,我们接下来看一下几种错误码的组成。
在继续前进之前,我们先来梳理一下现在学习的内容,我画了一张图方便大家理解:

#TS异常错误码格式

- 段选择子:索引IDT,GDT,LDT等描述符表内的描述符
- EXT: 如果EXT是1,就说明当前异常是在程序向外投递外部事件的过程中触发,比如说想抛出异常结果抛出异常的过程的时候异常了.
- IDT: 如果是1,就说明段选择子记录的是IDT表中的描述符;为0说明是GDT或LDT的内容.
- TI: 当IDT是0的时候生效, 当TI为1则说明段选择子指向LDT内的描述符,否则指向GDT的描述符.
为了将这些错误进行报告,我们这样封装即可:
/**
* 无效的TSS段, 可能发生在:访问TSS段或者任务切换时(这个时候也访问TSS)
* 包含一个错误码, 该错误码由五个部分组成:
* - 段选择子\ TI\ IDT\ EXT _ 保留位
* @param rsp 段基址
* @param error_code 错误码,由段选择子\ TI\ IDT\ EXT _ 保留位五个部分组成
*
*/
void DoInvalidTSS(unsigned long rsp,unsigned long error_code)
{
unsigned long * p = NULL;
p = (unsigned long *)(rsp + 0x98);
printk("DoInvalidTSS(10),ERROR_CODE:%#018lx,RSP:%#018lx,RIP:%#018lx\n",error_code , rsp , *p);
switch (error_code & 6) {
case 2: printk("Ref to IDT");break; // IDT
case 4: printk("Ref to LDT");break; // LDT
case 0: printk("Ref to GDT");break; // GDT
default: printk("Ref ERROR!!!");break; // 错误码出错了
}
printk("Segment Selector Index:%#010x\n",error_code & 0xfff8);
while(1){
// Endless loop
continue;
}
}
为了输出方便,我封装了printk宏,该宏自动将背景颜色设置为黑色,将字体设置为白色(他的实现与color_printk)完全相同,只不过默认了颜色参数.
#PF异常错误码格式
PF错误是页错误,在进行内存引用时可能被触发:
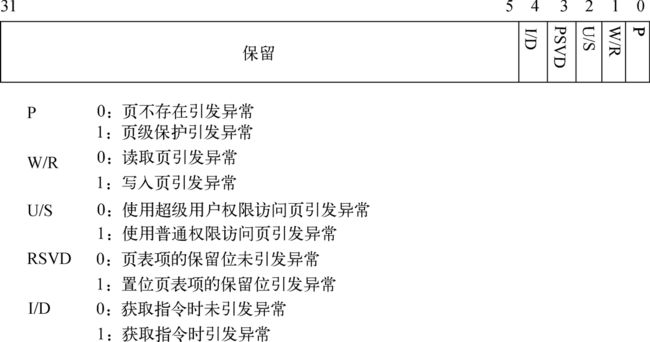
不同位置所代表的含义已经在上面被列举出来了,我们当前阶段只需要根据不同的情况进行输出即可。下面是处理程序:
/**
* 页错误,在访问内存出错时出现, 输出相应的错误类型
* @param rsp 段基址
* @param error_code 错误码,由段选择子\ TI\ IDT\ EXT _ 保留位五个部分组成
*/
void DoPageFault(unsigned long rsp,unsigned long error_code)
{
unsigned long * p = NULL;
unsigned long cr2 = 0;
__asm__ __volatile__("movq %%cr2, %0":"=r"(cr2)::"memory");
p = (unsigned long *)(rsp + 0x98);
printk("DoPageFault(14),ERROR_CODE:%#018lx,RSP:%#018lx,RIP:%#018lx\n",error_code , rsp , *p);
// 如果是0,就说明是缺页异常, 否则就说明是页级保护异常
if (!(error_code & 0x01)) printk("Page Not-Present,\t");
else printk("Page is Protected!\t");
// 检查W/R位,如果为1就说明写入错误,否则读取错误
if (error_code & 0x02) printk("Write Cause Fault,\t");
else printk("Read Cause Fault,\t");
// 检查U/S位,1代表普通用户访问时出现错误,否则超级用户访问时错误
if (error_code & 0x04) printk("Fault in user(3)\t");
else printk("Fault in supervisor(0,1,2)\t");
// RSVD位,如果为1则说明页表的保留项引发异常
if (error_code & 0x08) printk(",Reserved Bit Cause Fault\t");
// I/D位,如果为1则说明获取指令时发生异常
if (error_code & 0x10) printk(",Instruction fetch Cause Fault");
printk("\n");
printk("CR2:%#018lx\n",cr2);
while(1){
// Endless loop
continue;
}
}
相信到此为止,大家一定对异常处理的入口有了一定的理解了。我们的异常处理部分也到此为止了,如果大家有兴趣的话,可以在本次提交的源代码仓库中查看如何printk各种异常。当然,这样的做法是没有什么意义的,它只能让我们看到发生了什么样的异常,然后宕机,而不能进行真正的处理,我们可能需要在后面再进行真正的处理。
编译验证
编译
相信大家也有相同的体会,kernel的makefile脚本,随着文件数量的增多,变得越来越长了,为了解决这个问题,这里更改了makefile脚本,如下:
C_FILE_LIST=main position printk font gate trap
C_FILE_BUILD_GOALS=$(foreach file, $(C_FILE_LIST), ./build/$(file).o)
ASM_FILE_LIST=head entry
ASM_FILE_BUILD_GOALS=$(foreach file, $(ASM_FILE_LIST), ./build/$(file).o)
define \n
endef
all: system
# 生成kernel.bin
objcopy -I elf64-x86-64 -S -R ".eh_frame" -R ".comment" -O binary ./build/system ./build/kernel.bin
system: Kernel.lds build_all_c_code build_all_asm_code
#
ld -b elf64-x86-64 $(ASM_FILE_BUILD_GOALS) $(C_FILE_BUILD_GOALS) -T Kernel.lds -o ./build/system
build_all_c_code:
$(foreach file, $(C_FILE_LIST), gcc -mcmodel=large -fno-builtin -fno-stack-protector -m64 -c $(file).c -o ./build/$(file).o ${\n})
build_all_asm_code:
$(foreach file, $(ASM_FILE_LIST), gcc -E $(file).S > ./build/$(file).s ${\n} as --64 -o ./build/$(file).o ./build/$(file).s ${\n})
clean:
rm -rf ./build/*
这里的实现方式就是循环编译没一个文件,然后最后在一起链接。
验证
这里对main.c进行了更改,这里对异常处理函数进行了限定, 对TSS进行了读取与初始化,相应的,我们需要将head.S中读取TSS的代码删除,以避免重复读取,产生错误:
DoEnter(&global_position);
// TSS段描述符的段选择子加载到TR寄存器
load_TR(8);
// 初始化
set_tss64(
0xffff800000007c00, 0xffff800000007c00,
0xffff800000007c00, 0xffff800000007c00,
0xffff800000007c00, 0xffff800000007c00,
0xffff800000007c00, 0xffff800000007c00,
0xffff800000007c00, 0xffff800000007c00
);
SystemInterruptVectorInit(); // 初始化IDT表,确定各种异常的处理函数
int a = 1 / 0;
while(1){
;
}
最后执行结果如下:

可以看到,屏幕上已经打印出了相应的错误。
初级内存管理单元
在这一节中,我们讨论的是入门级的内存管理内容主要包括下面三个部分:
- 获取物理内容信息
- 统计可用物理内存页数量
- 分配物理页
简单回顾
在开始这一节的学习之前,我们来回顾一下上一章中,操作系统启动的过程中都做了些什么:
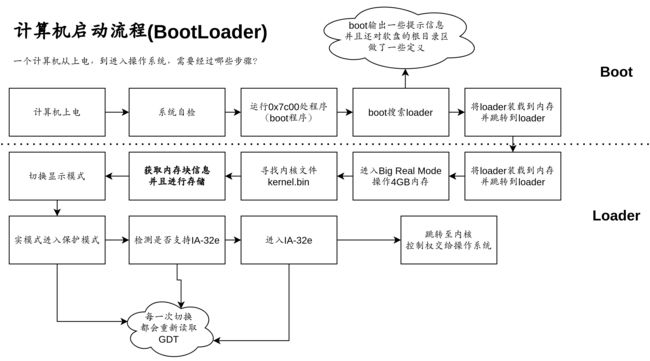
注意我标记为黑色的部分,在loader中,我们已经对计算机的内存信息进行了检查,并且将检测的信息进行了存储,相应的代码如下:
;======= 获取内存的类型及其对应的地址范围
mov ax, 1301h
mov bx, 000Fh
mov dx, 0400h ;row 4
mov cx, 44
push ax
mov ax, ds
mov es, ax
pop ax
mov bp, StartGetMemStructMessage
int 10h
mov ebx, 0
mov ax, 0x00
mov es, ax
mov di, MemoryStructBufferAddr
Label_Get_Mem_Struct:
mov eax, 0x0E820
mov ecx, 20
mov edx, 0x534D4150
int 15h
jc Label_Get_Mem_Fail
add di, 20
inc dword [MemStructNumber]
cmp ebx, 0
jne Label_Get_Mem_Struct
jmp Label_Get_Mem_OK
Label_Get_Mem_Fail:
mov dword [MemStructNumber], 0
mov ax, 1301h
mov bx, 008Ch
mov dx, 0500h ;row 5
mov cx, 23
push ax
mov ax, ds
mov es, ax
pop ax
mov bp, GetMemStructErrMessage
int 10h
Label_Get_Mem_OK:
mov ax, 1301h
mov bx, 000Fh
mov dx, 0600h ;row 6
mov cx, 29
push ax
mov ax, ds
mov es, ax
pop ax
mov bp, GetMemStructOKMessage
int 10h
这里我们通过int 15h中断,将一个个内存块的信息进行保存,我们不用完整的复习int 15h的相关内容,只需知道三个关键点:
-
一、
int 15h将内存信息保存到了es:di,这里每次做完一次之后di都会增加20 -
二、存储的内存信息格式如下:
偏移 名称 意义 0 BaseAddrLow 基地址的低 32 位 4 BaseAddrHigh 基地址的高 32 位 8 LengthLow ⻓度(字节)的低 32 位 12 LengthHigh ⻓度(字节)的高 32 位 16 Type 这个内存区域的类型 我们可以看到,这里的信息实际上就是在用
起点 + 长度的方法来描述一块内存,其中,内存类型如下:取值 名称 意义 1 AddressRangeMemory 可以被OS使用的内存 2 AddressRangeReserved 正在使用的区域或者不能系统保留不能使用的区域 其他 未定义 各个具体机器会有不同的意义,在这里我们暂时不用关心,将它视为AddressRangeReserved即可 -
三、这些信息被保存在
0x7e00地址下
那剩下的事情就变得简单且枯燥了,我们只需要从0x7e00开始读取,一次读取20字节,20字节中包含5个整形,每个整型变量都表示一个参数。剩下的事情都会变得非常自然,我们只需要读取即可。
读取内存分布
在这里,我们新建一个文件memory.h/memory.c来描述内存相关的操作,为了描述每个内存块,我们建立一个和上面表格结构相同的结构体:
/**
* 用于描述一个内存块的结构体
* baseAddrHigh : baseAddrLow 拼接起来就是基地址
* lengthHigh : lengthLow 拼接起来就是内存块长度
* type 内存类型, 1 :可被os使用, 2 : 正在使用或不可使用 其他:没有意义
*/
struct MemoryBlockE820{
unsigned int baseAddrLow;
unsigned int baseAddrHigh;
unsigned int lengthLow;
unsigned int lengthHigh;
unsigned int type;
};
除此之外,我们还需要一个函数来对内存信息进行初始化,以读取存储在内存0x7e00为首的内存信息,就叫他InitMemory,我们在memory.h中对其进行声明,在memory.c中对其进行实现即可:
/**
* 读取内存中存储的内存块信息
* 默认读取基地址为0x7e00,这里填写线性地址
* 会输出每一块内存的信息,并且输出总可用内存
*/
void InitMemory(){
unsigned long TotalMem = 0 ;
struct MemoryBlockE820 *p = NULL;
printk("Display Physics Address MAP,Type(1:RAM,2:ROM or Reserved,3:ACPI Reclaim Memory,4:ACPI NVS Memory,Others:Undefine)\n");
p = (struct MemoryBlockE820 *)0xffff800000007e00; // 将基地址对齐
// 循环遍历,输出内存信息
for(int i = 0;i < 32;i++){
// 输出内存信息
printk("Address:%#010x,%08x\tLength:%#010x,%08x\tType:%#010x\n", \
p->baseAddrHigh,p->baseAddrLow,p->lengthHigh,p->lengthLow,p->type);
// 统计可用内存
unsigned long tmp = 0;
if (p->type == 1){ // 如果内存可用
tmp = p->lengthHigh;
TotalMem += p->lengthLow;
TotalMem += tmp << 32;
}
if (p->type > 4)
break;
}
// 输出总可用内存
printk("OS Can Used Total RAM:%#018lx\n",TotalMem);
}
这个函数并没有进行存储,而直接将信息进行了输出,我们在main中添加相应的输出,进行查看(需要注意的是,你需要把除0错误去掉,要不然会宕机),更改后的程序片段如下:
SystemInterruptVectorInit(); // 初始化IDT表,确定各种异常的处理函数
InitMemory(); // 输出所有内存信息
while(1){
;
}
由于我们新建了一个memory,所以我们需要向makefile文件中添加相应的描述:
C_FILE_LIST=main position printk font gate trap memory
C_FILE_BUILD_GOALS=$(foreach file, $(C_FILE_LIST), ./build/$(file).o)
添加的方法非常简单,我们只需要将memory添加到C_FILE_LIST的尾部即可,可见我们之前的写法带来了极大的便利。
运行结果如下:
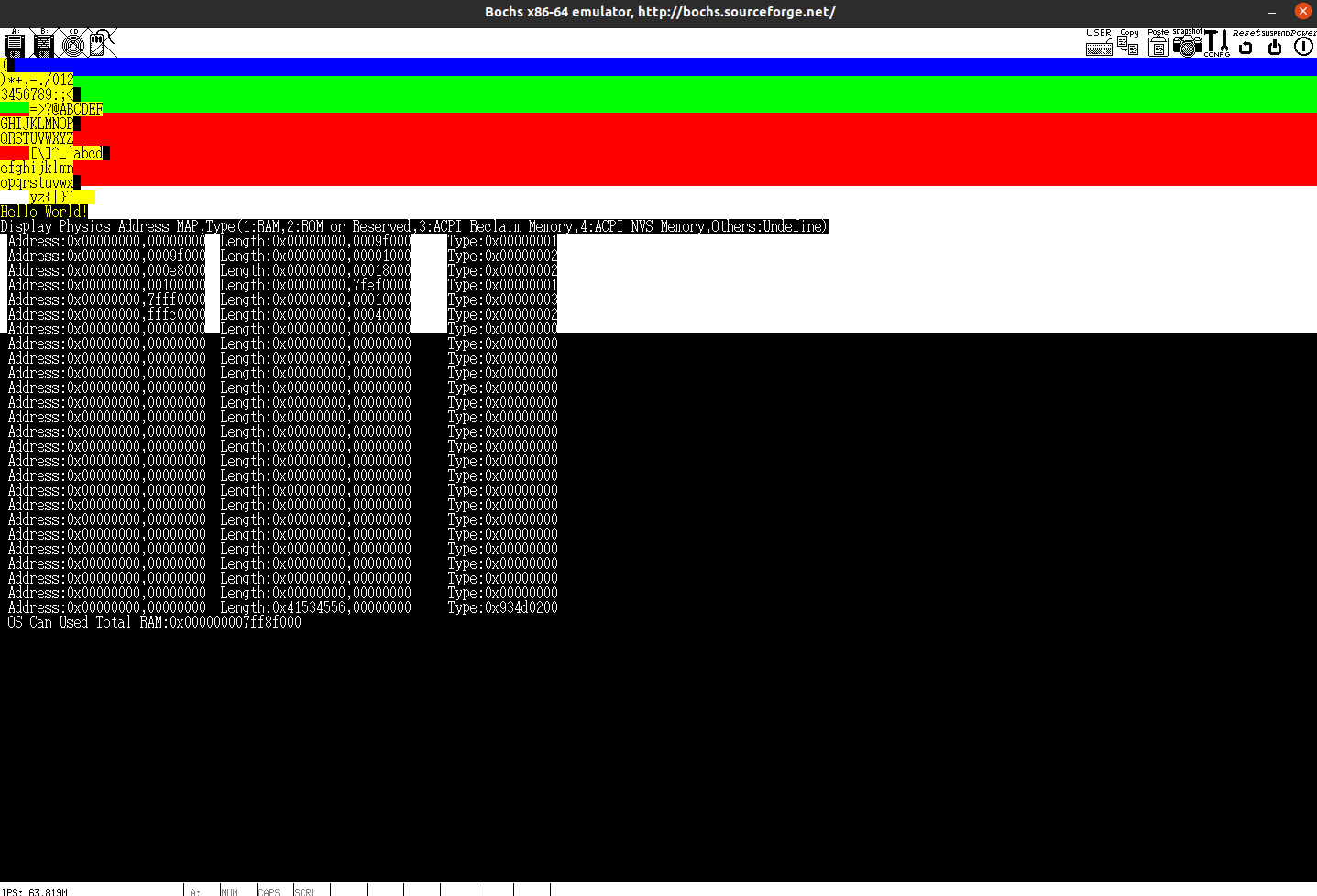
我们的这个虚拟机一共有0x7ff8f000的内存,换算一下大约是2G,这与我们之前做配置的时候分配的值是相近的,不完全相同是因为我们其他部分还占用了一部分的内存。
统计可用内存
在上一节中,我们的内存块的描述信息分了高低位来表示,但显然这不大合理。所以我们准备用新的方法来表示(就是把两个int合成一个long):
/**
* 用于描述一个内存块的结构体
* baseAddr 基地址
* length 内存块长度
* type 内存类型, 1 :可被os使用, 2 : 正在使用或不可使用 其他:没有意义
*/
struct MemoryBlockE820{
unsigned long baseAddr;
unsigned long length;
unsigned int type;
}__attribute__((packed));
同时,为了记录全局信息,我们使用一个全局描述表来进行存储,同样,全局描述表也是一个结构体:
/**
* 全局的内存信息描述
*/
struct GlobalMemoryDescriptor{
struct MemoryBlockE820 e820[32];
unsigned long e820_length;
};
extern struct GlobalMemoryDescriptor memory_management_struct;
相应的,我们需要对这部分的读取代码进行更改:
// 循环遍历,输出内存信息
for(int i = 0;i < 32;i++, p++){
// 输出内存信息
printk("Address:%#018lx\tLength:%#018lx\tType:%#010x\n", p->baseAddr,p->length,p->type);
// 统计可用内存
unsigned long tmp = 0;
if (p->type == 1) TotalMem += p->length;
// 存储内存块信息, 更新长度
memory_management_struct.e820[i] = (struct MemoryBlockE820){p->baseAddr, p->length, p->type};
memory_management_struct.e820_length = i;
if (p->type > 4) break;
}
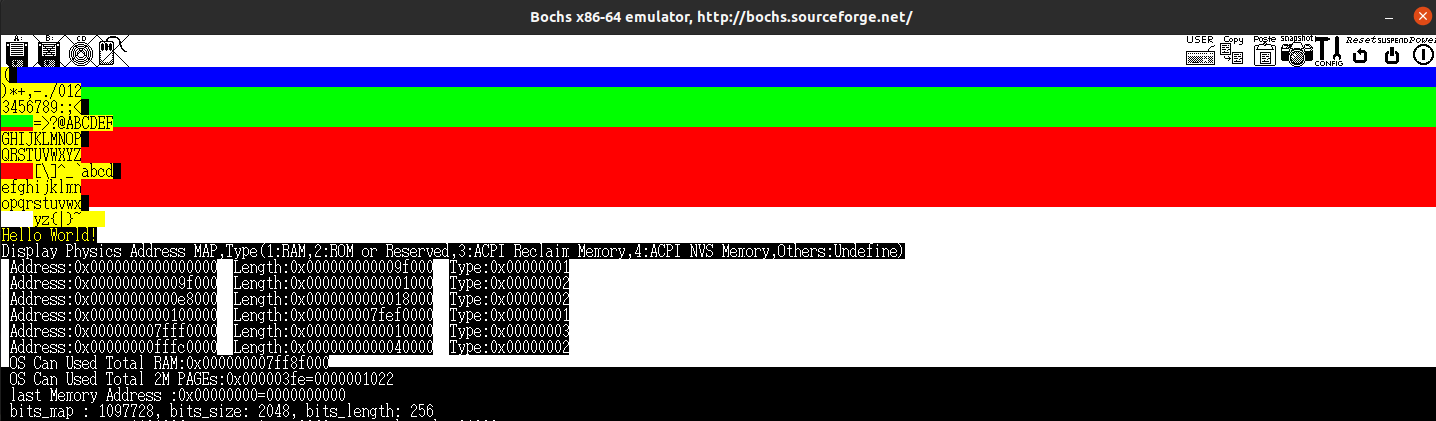
更改后运行结果如下:

实际上结果没有改变,因为我们只不过是换了个类型而已,内存空间是没有变的
接下来,我们要对结构体数组中的可用物理内存段进行2 MB物理页边界对齐,并统计出可用物理页的总量,为此,需要进行一些宏定义,这些宏定义我们就用作者给出的,如下:
#define PTRS_PER_PAGE 512 // 页表中条目的个数
#define PAGE_OFFSET ((unsigned long)0xffff800000000000) // 内核层起始线性地址
#define PAGE_1G_SHIFT 30 // 1GB = 1Byte << 30
#define PAGE_2M_SHIFT 21 // 2MB = 1Byte << 21
#define PAGE_4K_SHIFT 12 // 4kB = 1Byte << 12
#define PAGE_2M_SIZE (1UL << PAGE_2M_SHIFT) // 2M内存的大小
#define PAGE_4K_SIZE (1UL << PAGE_4K_SHIFT) // 4K内存的大小
// Mask, 类似于子网掩码
#define PAGE_2M_MASK (~ (PAGE_2M_SIZE - 1)) // 1111..0000
#define PAGE_4K_MASK (~ (PAGE_4K_SIZE - 1)) // 1111..0000
// 将参数addr按2 MB页的上边界对齐
#define PAGE_2M_ALIGN(addr) (((unsigned long)(addr) + PAGE_2M_SIZE - 1) & PAGE_2M_MASK)
#define PAGE_4K_ALIGN(addr) (((unsigned long)(addr) + PAGE_4K_SIZE - 1) & PAGE_4K_MASK)
// 将内核层虚拟地址转换成物理地址
#define CONVERT_VIRTUAL_ADDRESS_TO_PHYSICAL_ADDRESS(addr) ((unsigned long)(addr) - PAGE_OFFSET)
// 将物理地址转换成内核层虚拟地址
#define CONVERT_PHYSICAL_ADDRESS_TO_VIRTUAL_ADDRESS(addr) ((unsigned long *)((unsigned long)(addr) + PAGE_OFFSET))
各个宏的含义已经在上面的代码中定义,需要特别注意的是对齐的方法:
- 首先有一个MASK, 这个mask和计算机网络中的子网掩码非常相似,我们可以把内存块地址的前半部分看做计算机网络中的公网ip,公网ip加上偏移,就是完整的ip地址,这里我们的mask就像是子网掩码,1标记的地方描述了当前的地址空间处于那个页中(当然这个页是由我们进行划分的)。
- 对齐想要达到的目的就是:
0xxxxxxxxxx对应的内存地址,都对应0xxxxxxx000这个内存块, 这里的对齐方式不是向下对齐,而是向上对齐,所以要先加上块大小-1再进行取余

接下来我们用这个宏来统计可用页的数量:
TotalMem = 0;
for(int i = 0; i <= memory_management_struct.e820_length; i ++){
if (memory_management_struct.e820[i].type != 1) continue;
unsigned long start, end;
start = PAGE_2M_ALIGN(memory_management_struct.e820[i].baseAddr); // 计算开头的向后对齐地址
end = (
(memory_management_struct.e820[i].baseAddr + memory_management_struct.e820[i].length)
>> PAGE_2M_SHIFT
) << PAGE_2M_SHIFT; // 计算结尾的向前对齐地址
if (end <= start) continue;
TotalMem += (end - start) >> PAGE_2M_SHIFT;
printk("OS Can Used Total 2M PAGEs:%#010x=%010d\n",TotalMem,TotalMem);
}

可以看到,我们一共有1022个可用的页,当然了,这种取页的方法存在他的局限性,比如说:每一段都要掐头去尾(因为头向后对齐,尾向前对齐),段越多,浪费的空间也就越多,但是我们还是统计出了页的信息!
分配可用的物理页
组织结构
现在我们手中掌握了1022个物理页,那么下一步就是去管理他们了。为了更好的管理内存,我们创建了如下的结构体:
/**
* 描述一个页的基本信息
* @param zone_struct 指向本页所属的区域结构体
* @param PHY_address 页的物理地址
* @param attribute 页的属性
* @param reference_count 描述该页的引用次数
* @param age 描述该页的创建时间
*/
struct Page {
struct Zone * zone_struct;
unsigned long PHY_address;
unsigned long attribute;
unsigned long reference_count;
unsigned long age;
};
/**
* 可用物理内存区域
* @param pages_group 属于该zone的page的列表
* @param pages_length 当前区域包含的页的数量
* @param zone_start_address 本区域第一个页对齐后地址
* @param zone_end_address 本区域最后一个页对齐后地址
* @param zone_length 本区域经过页对齐后的地址长度
* @param attribute 空间属性
* @param GMD_struct 指针,指向全局描述Global_Memory_Descriptor 的实例化对象 memory_management_struct
* @param page_using_count 已经使用的页数量
* @param page_free_count 没有被使用的页的数量
* @param total_pages_link 本区域物理页被引用次数之和
*/
struct Zone {
struct Page * pages_group;
unsigned long pages_length;
unsigned long zone_start_address;
unsigned long zone_end_address;
unsigned long zone_length;
unsigned long attribute;
struct GlobalMemoryDescriptor * GMD_struct;
unsigned long page_using_count;
unsigned long page_free_count;
unsigned long total_pages_link;
};
相信通过上面两个结构体的定义,大家能够理解这里内存管理的组织方式了:

其中,B代表不能被我们使用的内存,那么相应的,我们全局的内存描述也需要做出相应的变化:
/**
* 全局的内存信息描述
* @param e820 cpu探索内存后存储的信息
* @param e820_length 记录有效的内存的长度,配合e820使用
* @param bits_map 物理地址空间页映射位图
* @param bits_size 物理地址空间页数量
* @param bits_length 物理地址空间页映射位图长度
* @param pages_struct 指向全局struct page结构体数组的指针
* @param pages_size struct page结构体总数
* @param pages_length struct page结构体数组长度
* @param zones_struct 指向全局zone结构体数组的指针
* @param zones_size zone结构体数量
* @param zones_length zone数组长度
* @param start_code 内核程序起始段代码地址
* @param end_code 内核程序结束代码段地址
* @param end_data 内核程序结束数据段地址
* @param end_brk 内核程序的结束地址
* @param end_of_struct 内存页管理结构的结尾地址
*/
struct GlobalMemoryDescriptor{
struct MemoryBlockE820 e820[32];
unsigned long e820_length;
unsigned long * bits_map;
unsigned long bits_size;
unsigned long bits_length;
struct Page * pages_struct;
unsigned long pages_size;
unsigned long pages_length;
struct Zone * zones_struct;
unsigned long zones_size;
unsigned long zones_length;
unsigned long start_code , end_code , end_data , end_brk;
unsigned long end_of_struct;
};
初始化全局描述子存储空间
各个变量的含义已经列出,其中bits相关字段是struct page结构体的位图映射,它们是一一对应的关系。start_code、end_code、end_data、end_brk这4个成员变量,它们用于保存内核程序编译后的各段首尾地址。同时,为了获得这四个标记符的位置,我们需要使用编译器生成的全局变量:
// 标记编译器生成的区间
extern char _text;
extern char _etext;
extern char _edata;
extern char _end;
现在,有了这些结构体之后,我们需要将这些结构体的内容进行填充,首先在主函数中,修改start_code、end_code、end_data、end_brk这4个成员变量:
memory_management_struct.start_code = (unsigned long)& _text;
memory_management_struct.end_code = (unsigned long)& _etext;
memory_management_struct.end_data = (unsigned long)& _edata;
memory_management_struct.end_brk = (unsigned long)& _end;
接下来我们开始初始化bits_map,在初始化前需要先改变上面初始化有效内存块信息时的条件:
// 循环遍历,输出内存信息
for(int i = 0;i < 32;i++, p++){
if (p->type > 4 || p->length == 0 || p->type < 1) break;
// 输出内存信息
printk("Address:%#018lx\tLength:%#018lx\tType:%#010x\n", p->baseAddr,p->length,p->type);
// 统计可用内存
unsigned long tmp = 0;
if (p->type == 1) TotalMem += p->length;
// 存储内存块信息, 更新长度
memory_management_struct.e820[i] = (struct MemoryBlockE820){p->baseAddr, p->length, p->type};
memory_management_struct.e820_length = i;
}
这样的做法是为了截断并且剔除脏数据。完成后,再对bits_map进行初始化:
/**
* ==========初始化 全局描述子中 与 bits map 相关的成员变量 ==========*/
// 计算bits_map的首地址, 计算方法为:内核程序的结束地址向后对齐, 即: 内核地址结束后的4k向后对齐
memory_management_struct.bits_map = (unsigned long *)((memory_management_struct.end_brk + PAGE_4K_SIZE - 1) & PAGE_4K_MASK);
// 计算bits_size, 即bits_map的大小, 其大小为最后一块可用内存地址/ 每一页的大小, 即:所有内存划分为页的页数
memory_management_struct.bits_size = TotalMem >> PAGE_2M_SHIFT;
// 计算位图的内存长度
memory_management_struct.bits_length = (((unsigned long)(TotalMem >> PAGE_2M_SHIFT) + sizeof(long) * 8 - 1) / 8) & ( ~ (sizeof(long) - 1));
// 将bitsmap置位,全都置位为1
memset(memory_management_struct.bits_map,0xff,memory_management_struct.bits_length);
// 输出相关信息
printk("bits_map : %d, bits_size: %d, bits_length: %d\n",
memory_management_struct.bits_map, memory_management_struct.bits_size, memory_management_struct.bits_length);
其中,每一步在做什么已经在注释中写得非常清楚了,相信大家也能够模糊的了解到bits_map与页之间的关系——即bits_map与内存中的页结构一一对应。
执行结果如下:
这里大家可能存在一个疑问:为什么这里统计出来有2048页,上面统计出来有1022页?有这个疑问的人一看就是前面没仔细看,前面在统计页数的时候,统计的是可用的页数。这里在记录页数的时候,统计方法是可用地址的最后一块的地址 / 每一页的大小,两种统计方法完全不同。
接下来按照相同的思路,我们初始化zones以及pages:
/**
* ==========初始化 pages ==========*/
// 记录本数组的初始地址, 初始化方法: bits_map的结束地址向后对齐
memory_management_struct.pages_struct = (struct Page *)(((unsigned long)memory_management_struct.bits_map + memory_management_struct.bits_length + PAGE_4K_SIZE - 1) & PAGE_4K_MASK);
// 记录页的数量
memory_management_struct.pages_size = TotalMem >> PAGE_2M_SHIFT;
// 记录page占用的物理空间
memory_management_struct.pages_length = ((TotalMem >> PAGE_2M_SHIFT) * sizeof(struct Page) + sizeof(long) - 1) & ( ~ (sizeof(long) - 1));
// 全都清空为0
memset(memory_management_struct.pages_struct,0x00,memory_management_struct.pages_length);
// 输出相关信息
printk("pages_struct : %d, pages_size: %d, pages_length: %d\n",
memory_management_struct.pages_struct, memory_management_struct.pages_size, memory_management_struct.pages_length);
/**
* ==========初始化 zones ==========*/
// 同样的方法:pages_struct首地址加物理长度
memory_management_struct.zones_struct = (struct Zone *)(((unsigned long)memory_management_struct.pages_struct + memory_management_struct.pages_length + PAGE_4K_SIZE - 1) & PAGE_4K_MASK);
// 初始化的时候,还没有zones,zones需要在后期进行统计
memory_management_struct.zones_size = 0;
// 计算zone占用的内存空间,暂时按照五个zone来计算
memory_management_struct.zones_length = (5 * sizeof(struct Zone) + sizeof(long) - 1) & (~(sizeof(long) - 1));
// 全部清空为0
memset(memory_management_struct.zones_struct,0x00,memory_management_struct.zones_length); //init zones memory
// 输出相关信息
printk("zones_struct : %d, zones_size: %d, zones_length: %d\n",
memory_management_struct.zones_struct, memory_management_struct.zones_size, memory_management_struct.zones_length);

这一小节中,我们将全局描述子GlobalMemoryDescriptor的存储空间进行了初始化,接下来我们要对其中的值进行填充。
初始化全局描述子内容
在前面的讲解中,我们已经搞明白了全局描述子、zones、pages之间的关系了,这里只需要实现即可。
/**
* ==========初始化 zones & pages 的内容信息 ==========
*/
for(int cur_block = 0; cur_block <= memory_management_struct.e820_length; cur_block ++ ){
// 如果内存块不可用,那么跳过
if (memory_management_struct.e820[cur_block].type != 1) continue;
/*===================计算开始、结尾地址===================*/
// 和上面统计可用页一样, 这里起点是右规后的地址
unsigned long start = PAGE_2M_ALIGN(memory_management_struct.e820[cur_block].baseAddr);
// 计算结尾的向前对齐地址
unsigned long end = (
(memory_management_struct.e820[cur_block].baseAddr + memory_management_struct.e820[cur_block].length)
>> PAGE_2M_SHIFT
) << PAGE_2M_SHIFT;
// 如果没有可用空间就跳过
if (end <= start) continue;
/*===================初始化zone===================*/
// 指针指向
struct Zone* curZone = memory_management_struct.zones_struct + memory_management_struct.zones_size;
memory_management_struct.zones_size ++;
curZone->zone_start_address = start;
curZone->zone_end_address = end;
curZone->zone_length = end - start;
curZone->page_using_count = 0;
curZone->page_free_count = (curZone->zone_length >> PAGE_2M_SHIFT);
curZone->total_pages_link = 0; // 总引用为0
curZone->attribute = 0;
curZone->GMD_struct = &memory_management_struct; // 这里取的是地址,因为前面的是指针
curZone->pages_length = (curZone->zone_length >> PAGE_2M_SHIFT);
// 基地址+起点所在页的数量
curZone->pages_group = (struct Page *)(memory_management_struct.pages_struct + (start >> PAGE_2M_SHIFT));
/*===================初始化Pages===================*/
struct Page* curPage = curZone->pages_group; // 指向最开始的页地址
// 遍历该内存区域中的每一个页, 写完一个页之后, 就接着写下一个页, 直到把当前zone中的页写完
for(int curPageId = 0; curPageId < curZone->pages_length; curPageId ++, curPage ++){
curPage->zone_struct = curZone; // 将当前的页指向当前的zone
// 当前page的物理地址就是: 当前zone的物理地址 + 第curPageId * 每一页的大小,其中curPageId从0开始
curPage->PHY_address = start + PAGE_2M_SIZE * curPageId;
curPage->attribute = 0;
curPage->reference_count = 0;
curPage->age = 0;
// 把当前struct page结构体所代表的物理地址转换成bits_map映射位图中对应的位。
// 这里的bits_map之中,每个变量都是一个unsigned long 类型的 64位整数
// 每一位可以表示该位所对应的page是否使用
*(memory_management_struct.bits_map + ((curPage->PHY_address >> PAGE_2M_SHIFT) >> 6)) ^=
1UL << (curPage->PHY_address >> PAGE_2M_SHIFT) % 64;
}
}
我们看一下整体的流程:
- 我们先初始化了Zone的信息,对于每一个内存块,如果该块的
Type是1,则添加一个Zone,zone的范围是块的首地址向后对齐,尾地址向前对齐,这样的做法能够让Zone分配页的时候足够安全。 - 分配完zone后,我们循环遍历zone中每一块可用的2MB_Page,将其分配为一个Page,并将该Page的所属Zone指向当前的Zone
这有一点不好理解,需要我们特殊强调。回忆一下我们如何初始化bits_map:
// 计算位图的内存长度
memory_management_struct.bits_length = (((unsigned long)(TotalMem >> PAGE_2M_SHIFT) + sizeof(long) * 8 - 1) / 8) & ( ~ (sizeof(long) - 1));
这里在做的事情是:将页的数量除八后以八为单位向后对齐,那么接下来,除八有什么意义么?实际上,我们结合这一段代码中的:
// 把当前struct page结构体所代表的物理地址转换成bits_map映射位图中对应的位。
// 这里的bits_map之中,每个变量都是一个unsigned long 类型的 64位整数
// 每一位可以表示该位所对应的page是否使用
*(memory_management_struct.bits_map + ((curPage->PHY_address >> PAGE_2M_SHIFT) >> 6)) ^=
1UL << (curPage->PHY_address >> PAGE_2M_SHIFT) % 64;
就会非常好理解了:bitsmap的每一位对应着一个page是否可用,那么一个字节就能够表达8个page;到此为止相信大家一定能理解为什么需要除8后对齐以及bitsmap与page之间一对一的关系了。(不懂的回去多看几遍)他们之间的关系实际上就是bitsmap的每一位都是用来表示一个page是否被使用,在初始化时,bitsmap被置为全1,在初始化page的时候,将可以使用的page置为0,代表可用。
在中间插入一些printk函数,输出一些提示信息,如下(下一小节会根据这些信息来进行一些讲解):

进行初始化的收尾工作
先来讲为什么要收尾:可以注意到,第一段内存的大小不足2MB,无法构成一个页,所以他不会被初始化。这是一个随机事件么?不!这是因为0~2 MB的物理内存页包含多个物理内存段,其中还囊括了内核程序。所以必须对该页进行特殊初始化:
/**
* ==========对第一段内存进行初始化(第一段比较特殊,包含多个物理内存段所以要特殊处理)==========
*/
// 将pages_struct的初始地址指向
memory_management_struct.pages_struct->zone_struct = memory_management_struct.zones_struct;
memory_management_struct.pages_struct->PHY_address = 0UL;
memory_management_struct.pages_struct->attribute = 0;
memory_management_struct.pages_struct->reference_count = 0;
memory_management_struct.pages_struct->age = 0;
memory_management_struct.zones_length = (memory_management_struct.zones_size * sizeof(struct Zone) + sizeof(long) - 1) & ( ~ (sizeof(long) - 1));
接下来我们还需要进行一些其他的设置:
// 两个不同类型的地址区间,现在付的值暂时没有意义
ZONE_DMA_INDEX = 0;
ZONE_NORMAL_INDEX = 0;
for(int i = 0;i < memory_management_struct.zones_size;i++) {
struct Zone * z = memory_management_struct.zones_struct + i;
printk("zone_start_address:%#018lx,zone_end_address:%#018lx,\n\
zone_length:%#018lx,pages_group:%#018lx,pages_length:%#018lx\n", \
z->zone_start_address,z->zone_end_address,z->zone_length,z->pages_group,z->pages_length);
// 如果起始地址符合条件,那么就将其设置为非映射区间
if (z->zone_start_address == 0x100000000)
ZONE_UNMAPED_INDEX = i;
}
// 记录向后规格化后的结束地址
memory_management_struct.end_of_struct = (unsigned long)((unsigned long)
memory_management_struct.zones_struct + memory_management_struct.zones_length + sizeof(long) * 32
) & ( ~ (sizeof(long) - 1));
这段程序主要是记录从哪一段开始没有被页表映射,以及全局内存描述结构体的结束地址。接下来,我们将全局描述结构体所在的页以及该页前面的页描述为:正在使用+经过页表映射的页+内核初始化程序+内核层页,程序如下:
/**
* ==========输出提示信息以及将前面的页设置为 正在使用+经过页表映射的页+内核初始化程序+内核层页==========
*/
printk("start_code:%#018lx,end_code:%#018lx,end_data:%#018lx, end_brk:%#018lx,end_of_struct:%#018lx\n",memory_management_struct.start_code, memory_management_struct.end_code,memory_management_struct.end_data,memory_management_struct.end_brk, memory_management_struct.end_of_struct);
// 获取结构体所在页
int curPageId = CONVERT_VIRTUAL_ADDRESS_TO_PHYSICAL_ADDRESS(memory_management_struct.end_of_struct) >> PAGE_2M_SHIFT;
// 对前面的页进行初始化
for(int pageId = 0;pageId <= curPageId;pageId++)
PageInit(memory_management_struct.pages_struct + pageId,PG_PTable_Maped | PG_Kernel_Init | PG_Active | PG_Kernel);
这里一使用了一些宏,这些宏的部分定义如下:
// 经过页表映射的页
#define PG_PTable_Maped (1 << 0)
// 内核初始化程序
#define PG_Kernel_Init (1 << 1)
// 被引用的页
#define PG_Referenced (1 << 2)
// 脏的页
#define PG_Dirty (1 << 3)
// 使用中的页
#define PG_Active (1 << 4)
// 内核层页
#define PG_Kernel (1 << 7)
// 共享属性
#define PG_K_Share_To_U (1 << 8)
不同关键词的含义已经在注释中写清楚了,不同的位代表不同的属性,相互之间或起来互不影响,想要判断有没有该属性直接与该数字按位与就可以与出来了。接下来我们看一下PageInit函数:
/**
* @param page 指针,指向想要被初始化的 page
* @param flag 初始化时的参数
*/
void PageInit(struct Page * page,unsigned long flag){
if (!page->attribute) { // 如果该页没有使用过
*(memory_management_struct.bits_map + ((page->PHY_address >> PAGE_2M_SHIFT) >> 6)) |= 1UL << (page->PHY_address >> PAGE_2M_SHIFT) % 64;
page->attribute = flag; // 将状态置为flag
page->reference_count++; // 被使用了,ref ++
// 对对应的zone进行修改
page->zone_struct->page_using_count++;
page->zone_struct->page_free_count--;
page->zone_struct->total_pages_link++;
}
// 如果已经被引用,或是有共享属性,那么就不需要在调整可用页数,而是直接改变引用数量,并且调整页的属性即可
else if ((page->attribute & PG_Referenced) || (page->attribute & PG_K_Share_To_U) || (flag & PG_Referenced) || (flag & PG_K_Share_To_U)) {
page->attribute |= flag;
page->reference_count++;
page->zone_struct->total_pages_link++;
}
// 既没有被引用,又没有共享属性,而且状态也不为空,那么就 添加页表属性,并置位bit映射位图的相应位。
else {
*(memory_management_struct.bits_map + ((page->PHY_address >> PAGE_2M_SHIFT) >> 6)) |= 1UL << (page->PHY_address >> PAGE_2M_SHIFT) % 64;
page->attribute |= flag;
}
return 0UL;
}
这个函数中包含着三种情况:
- 如果该页从来没有使用过,那么就直接将flag赋值上去,并且添加引用,降低可用页数量
- 如果已经被引用或共享,那么就对没有的属性进行添加(使用或运算符进行运算),并且添加引用
- 如果都不是,那么仅仅是添加页表属性,并置位
bit映射位图的相应位。
清空页表项
Global_CR3 = GET_GDT();
color_printk(INDIGO,BLACK,"Global_CR3\t:%#018lx\n",Global_CR3);
color_printk(INDIGO,BLACK,"*Global_CR3\t:%#018lx\n",*CONVERT_PHYSICAL_ADDRESS_TO_VIRTUAL_ADDRESS(Global_CR3) & (~0xff));
color_printk(PURPLE,BLACK,"**Global_CR3\t:%#018lx\n",*CONVERT_PHYSICAL_ADDRESS_TO_VIRTUAL_ADDRESS(*CONVERT_PHYSICAL_ADDRESS_TO_VIRTUAL_ADDRESS (Global_CR3) & (~0xff)) & (~0xff));
for(i = 0;i < 10;i++)
*(CONVERT_PHYSICAL_ADDRESS_TO_VIRTUAL_ADDRESS(Global_CR3) + i) = 0UL;
FLUSH_TLB();
首先使用GET_GDT获取CR3寄存器的基地址,CR3是页目录基址寄存器,保存页目录表的物理地址,也就是说:*Global_CR3表示的就是页表的地址,**Global_CR3表示的就是页表的第一项的内容。紧接着为了消除一致性页表映射,将页表的前十项清零,并且使用FLUSH_TLB使清零生效。
其中,Get_gdt与FLUSH_TLB代码如下,这里就不做讲解了:
#define FLUSH_TLB() \
do \
{ \
unsigned long tmpreg; \
__asm__ __volatile__ ( \
"movq %%cr3, %0 \n\t" \
"movq %0, %%cr3 \n\t" \
:"=r"(tmpreg) \
: \
:"memory" \
); \
}while(0)
unsigned long * GET_GDT()
{
unsigned long * tmp;
__asm__ __volatile__ (
"movq %%cr3, %0 \n\t"
:"=r"(tmp)
:
:"memory"
);
return tmp;
}
程序执行结果如下:
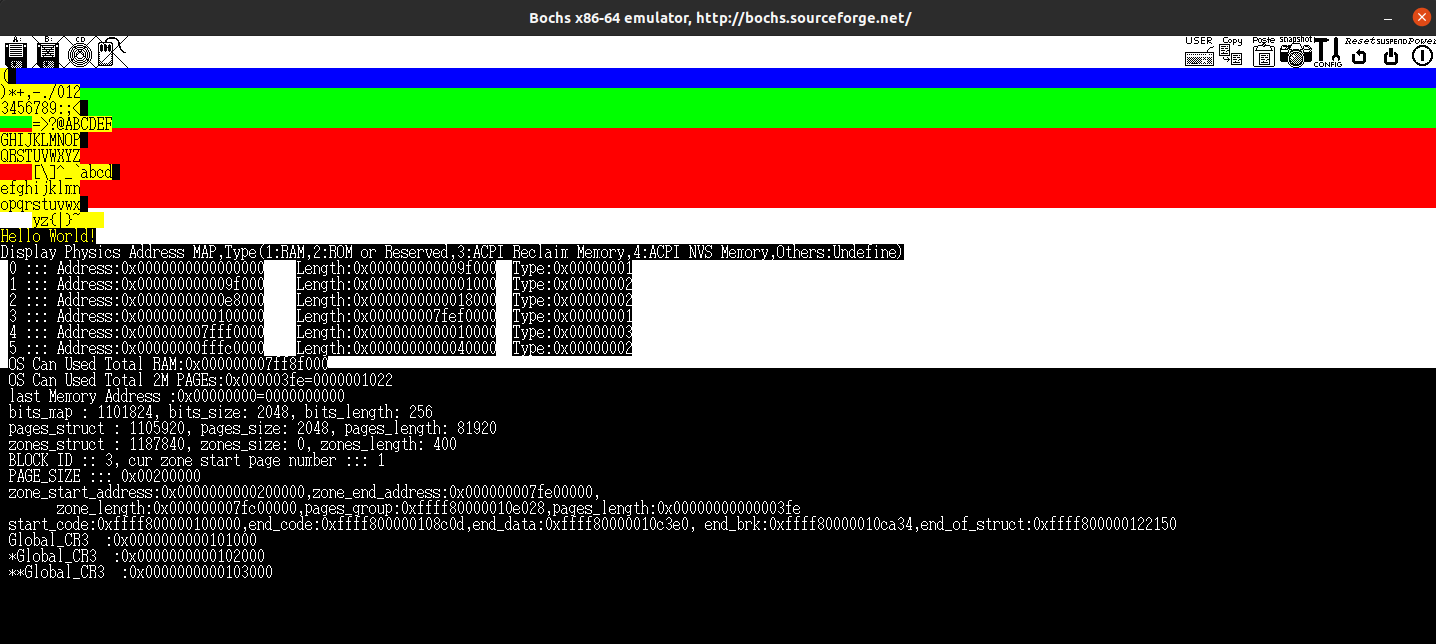
分配物理内存页函数
在分配的过程中,为了描述需要的内存的类型,有了下面三个宏定义:
// 内核使用的内存
#define ZONE_DMA (1 << 0)
// 普通内存
#define ZONE_NORMAL (1 << 1)
// 不被页表映射的内存
#define ZONE_UNMAPED (1 << 2)
我们来梳理一下应该怎么去分配内存:
- 首先根据不同的需求,查找不同的zone
- 在满足需求的段中,查找可用page
- 将可用page进行
init操作,然后返回
在这个过程中,我们将zone_dma和zone_NORMAL都设置为了0,因为我们暂时不会对这两种内存进行查找,在日后我们还会对其进行更改。而UNMAPD非映射内存的区间我们已经定义。剩下的事情,只需要按照需求进行遍历即可,我们在memory.h中定义一个函数
struct Page* malloc_page(int zone_select,int number,unsigned long page_flags);
并且在memory.c中实现它,首先我们需要根据需求的内存类型确定查找范围:
int begin_zone, end_zone;
// 根据zone_select选择开始的zone
switch (zone_select){
case ZONE_DMA:
begin_zone = 0;
end_zone = ZONE_DMA_INDEX;
break;
case ZONE_NORMAL:
begin_zone = ZONE_DMA_INDEX;
end_zone = ZONE_NORMAL_INDEX;
break;
case ZONE_UNMAPED:
begin_zone = ZONE_UNMAPED_INDEX;
end_zone = memory_management_struct.zones_size;
break;
default:
printk("Malloc ERROR ! NO SUCH KIND OF MEMORY!");
return NULL;
break;
}
如果需要的内存类型有误,那么最后的结果将为空。接下来我们逐一检索:
// 遍历每一个zone进行检索
for(int cur_zone_id = begin_zone; cur_zone_id < end_zone; cur_zone_id ++){
struct Zone* cur_zone = memory_management_struct.zones_struct + cur_zone_id; // 获取当前zone
// 如果当前的Zone中,没有足够的页,那么就找下一个
if (cur_zone->page_free_count < number) continue;
unsigned long start = (cur_zone->zone_start_address >> PAGE_2M_SHIFT); // 开始的页号
unsigned long end = (cur_zone->zone_end_address >> PAGE_2M_SHIFT); // 结束的页号
unsigned long cur_jump_width = 64 - (start % 64); // 当前想要走到64位对齐的下一个位置需要走多远
// 顺序检查
for(int cur_page_id = start; cur_page_id < end; cur_page_id += (cur_page_id % 64 == 0) ? 64 : cur_jump_width ){
unsigned long *cur_bits_map = memory_management_struct.bits_map + (cur_page_id >> 6); // 将指针指向当前page所在的bitsmap元素
unsigned long shift_index = (cur_page_id % 64);// 确定当前bitsmap元素的哪一位描述当前页
for(int check_page_id = shift_index; check_page_id < 64 - shift_index; check_page_id ++){
if ( !(((*cur_bits_map >> check_page_id) |(*(cur_bits_map + 1) << (64 - check_page_id))) &
(number == 64 ? 0xffffffffffffffffUL : ((1UL << number) - 1))) ){
// 如果当前bitsmap元素中,0 ~ number 的没有被使用,那么就将其分配
unsigned long st_page;
st_page = cur_page_id + check_page_id - 1;
// 循环初始化
for(int init_page_id = 0; init_page_id < number; init_page_id ++){
struct Page* init_page_ptr = memory_management_struct.pages_struct + st_page + init_page_id;
PageInit(init_page_ptr,page_flags);
}
// 找到了就返回页
return (struct Page *)(memory_management_struct.pages_struct + st_page);
}
}
}
}
// 没找到就返回空
return NULL;
这里实现的方法非常的弱,简而言之就是这样:
- 检查每一个bitsmap, 从开头进行检查(如果当前对齐64位的话,那么就从第0位开始,如果没有就从当前位开始):
- 有没有连续number个可以分配的page?没有的话就找下一个bitsmap元素,有的话就返回
通过这个算法我们就看出来,这个算法有非常多的bug:
- 空间够但是分配不了的问题(随便一想就有很多):
- 一、不在同一个bitsmap元素中,但是连续空间足够
- 二、在同一个bitsmap元素中,但是最开始的被分配了
- 等等
这两种情况我画了个图:
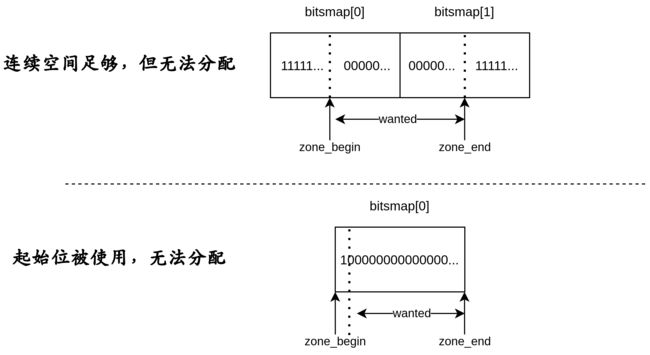
在未来,我们会对这种算法进行优化,如果我们使用这种内存分配算法,那么我们写出来的操作系统一定是一场灾难。但是现在,我们的主要关注点在于如何组织内存、如何描述内存、内存块、zone、page之间的关系,以及如何使用bitsmap位图来描述特定页是否被使用。这才是这一节的重点。
接下来我们来验证一下:
InitMemory(); // 输出所有内存信息
printk("alloc pages!\n");
struct Page* pages = AllocPages(ZONE_NORMAL,64,PG_PTable_Maped | PG_Active | PG_Kernel);
for(int i = 0;i <= 64;i++){
printk("page%d\tattribute:%#018lx\taddress:%#018lx\t",i,(pages + i)->attribute,(pages + i)->PHY_address);
i++;
printk("page%d\tattribute:%#018lx\taddress:%#018lx\n",i,(pages + i)->attribute,(pages + i)->PHY_address);
}
printk("memory_management_struct.bits_map:%#018lx\n",*memory_management_struct.bits_map);
printk("memory_management_struct.bits_map:%#018lx\n",*(memory_management_struct.bits_map + 1));
结果如下:
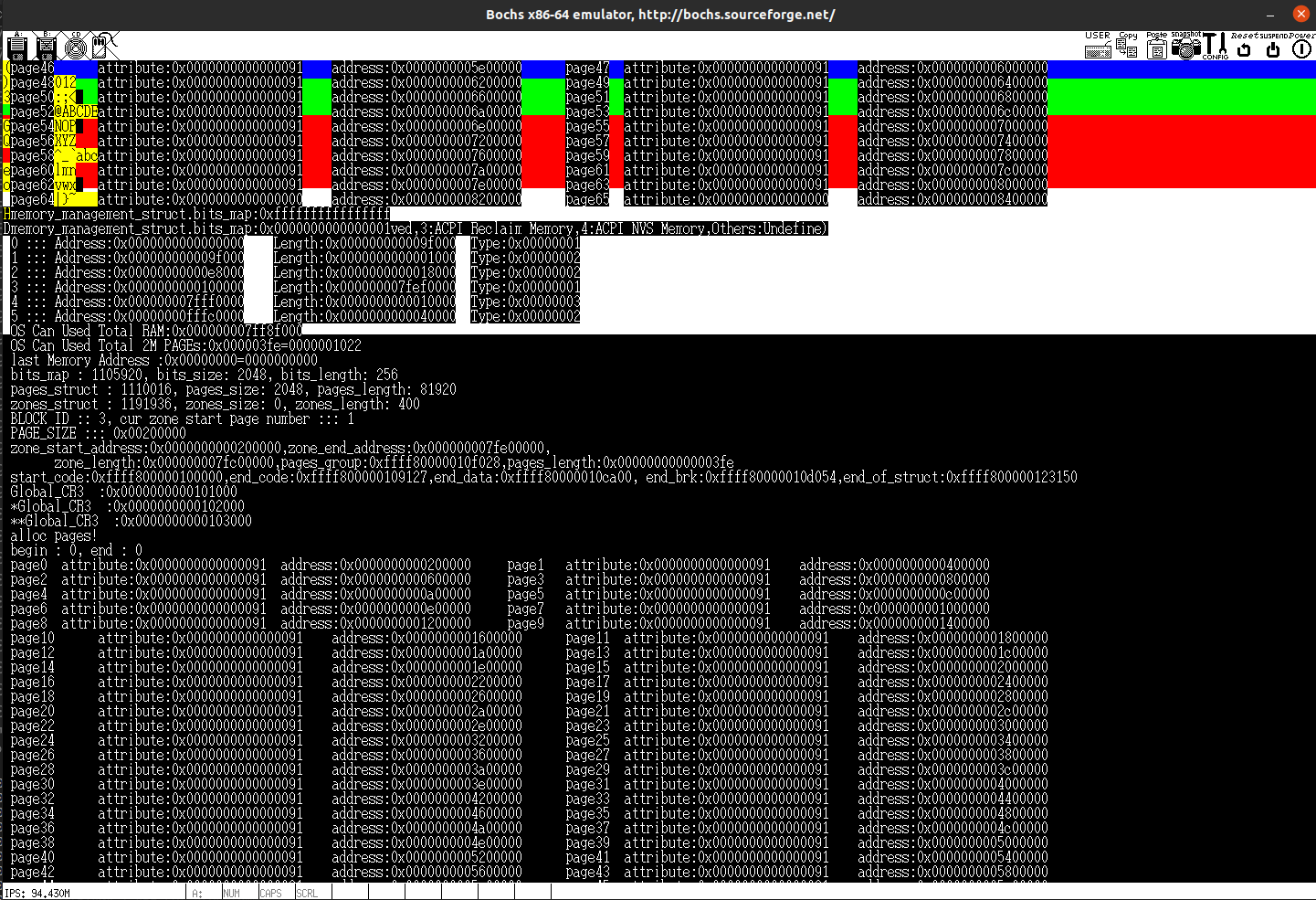
额,我们输出的太多了,效果非常不好,于是我决定把前面乱输出的给去了,最后显示如下:
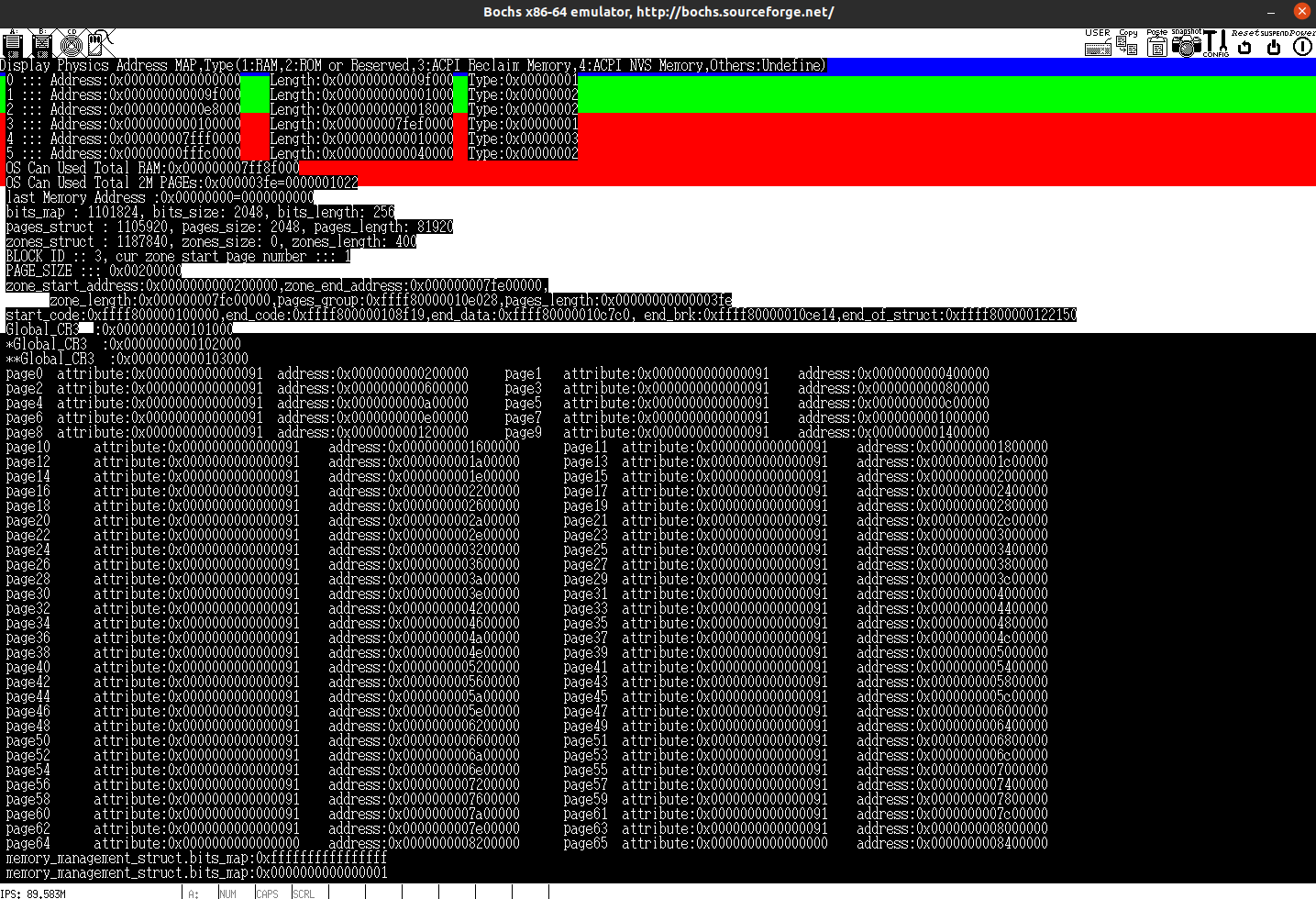
-
前64个(0~63)内存页结构的属性值已被设置为
0x91 -
物理地址从
0x200000开始,这与zone_start_address成员变量记录的地址值是一致的
结果是正确的,但是这个函数仍然有非常非常多的bug,但是正如前面所说,这一部分最重要的是认识、学习内存的组织形式等等基础知识。
中断处理
在这一节中,我们了解一下计算机是如何与外部设备进行通信的,相信大家都有听说过,计算机的键盘是通过中断进行相关操作的,那么这里我们来看一下与之配对的设备:这里我们介绍的是一个比较早年间的设备,它是单核处理器时代的经典中断控制器,在当年被广泛使用。
8259A PIC 与CPU之间的连通
首先,8259A PIC可以被分为主芯片与从芯片,如下图所示:
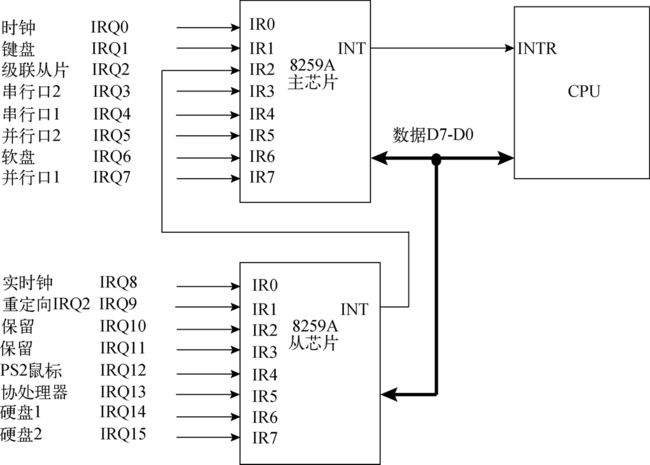
总体来说,结构如下:
- CPU与只能与主芯片进行通信,如果从芯片想要与CPU进行通信,那么需要通过主芯片的
IR2引脚导入,并从主芯片的INT引脚导出,来将中断信号发送给CPU的INTR引脚,进行相关处理。 INT信号更像是一个使能信号,他负责标记是否发生中断,与之共同工作的事一条数据总线:它包含着八位数据,主芯片、从芯片、CPU都可以进行读写。
不同端口的作用已经在图中列出,我们的键盘应该就是连接在主芯片上的,接下来我们来看一下8259A 主芯片中的具体结构:
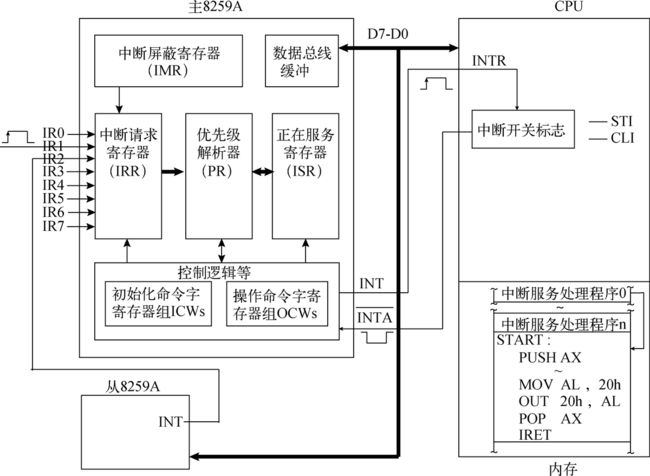
通过这张图,我们来梳理一下当中断事件发生时8259A芯片以及CPU都扮演着什么样的角色:
- 主芯片检测到中断事件:中断事件发生(
IR 0-- 7寄存器捕获到了时钟上升沿) - 使用中断屏蔽寄存器进行筛选:如果发生的事件是被允许的(不被屏蔽的),那么就继续,反之则结束
- 通过优先级解析器选择处理顺序:将所有待处理中断按照设定进行排序,先处理优先级更高的中断事件,向正在处理服务寄存器发送该事件
- 与CPU之间第一次握手:正在��务寄存器接到新的事件并且存储结束后,会向CPU发送INT中断(上升沿),CPU返回
INTA信号,表示收到 - 与CPU之间第二次握手:随后CPU会再次返回一个
INTA信号,这时,正在服务寄存器存储对应事件,8259A芯片向数据总线中写入中断向量号,cpu读取到总线中的中断向量后,执行异常处理例程(我们已经写过了)。 - 收尾处理:
- 8259A 使用自动结束中断:在第二个INTA脉冲信号的结尾处复位正在服务寄存器ISR的对应位
- 8259A 未使用自动结束中断:CPU必须在中断处理程序的结尾处向8259A芯片发送一个EOI(End of Interrupt,结束中断)命令,来复位ISR的对应位。如果中断请求来自于从芯片,那么我们就需要发送两个
EOI。
相信经过上面的阅读,大家能够了解主、从芯片与CPU之间的关系,以及他们是如何发送异常事件、CPU如何根据信号进行处理、如何进行收尾的了。在这个过程中,有一些不确定的状态:
- 优先级如何确定?
- 屏蔽何种中断?
- 是否使用自动结束中断模式?
- 等等
为了更改这些状态,我们在下一节中会对该芯片进行配置。
8259A PIC 初始化
通过配置ICW寄存器组和OCW寄存器组,可控制8259A芯片的初始模式与运行模式。
ICW
ICW寄存器是一个32位的寄存器,他可以被分为:ICW1, ICW2, ICW3, ICW4四个寄存器,作者给出了这些寄存器不同位的描述:
ICW1
| 位 | 描述 |
|---|---|
| 5~7 | 对于PC机,该位必须为0 |
| 4 | 对于ICW,该位必须为1 |
| 3 | 触发模式,现已忽略,必须为0 |
| 2 | 忽略,必须为0 |
| 1 | 1=单片8259A,0=级联8259A |
| 0 | 1=使用ICW4,0=不使用ICW4 |
主/从8259A芯片的ICW1寄存器都固定初始化为00010001B(11h)。
ICW2
| 位 | 描述 |
|---|---|
| 3~7 | 中断向量号 |
| 0~2 | 0 |
主8259A芯片的中断向量号设置为20h(占用中断向量号20h27h),从8259A芯片的中断向量号设置为28h(占用中断向量号28h2fh)。
ICW3
- 对于主芯片而言:
| 位 | 描述 |
|---|---|
| 7 | 1=IR7级联从芯片,0=无从芯片 |
| 6 | 1=IR6级联从芯片,0=无从芯片 |
| 5 | 1=IR5级联从芯片,0=无从芯片 |
| 4 | 1=IR4级联从芯片,0=无从芯片 |
| 3 | 1=IR3级联从芯片,0=无从芯片 |
| 2 | 1=IR2级联从芯片,0=无从芯片 |
| 1 | 1=IR1级联从芯片,0=无从芯片 |
| 0 | 1=IR0级联从芯片,0=无从芯片 |
这个用于记录各个引脚是否级联了从芯片。
- 对于从芯片而言:
| 位 | 描述 |
|---|---|
| 3~7 | 必须为0 |
| 0~2 | 从芯片连接到主芯片的IR引脚号 |
ICW4
| 位 | 描述 |
|---|---|
| 5~7 | 恒为0 |
| 4 | 1=SFNM模式,0=FNM模式 |
| 3、2 | 缓冲模式:00=无缓冲模式,10=从芯片缓冲模式,11=主芯片缓冲模式 |
| 1 | 1=AEOI模式,0=EOI模式 |
| 0 | 1=8086/88模式,0=MCS 80/85模式 |
在这个项目中,我们遵从作者的意见将主/从8259A芯片的ICW4寄存器设置为01h即可,即:FNM + 无缓冲模式 + EOI + 8086/88 模式:
- AEOI模式:此模式可使中断控制器收到CPU发送来的第2个INTA中断响应脉冲后,自动复位ISR寄存器的对应位。
- EOI模式:在EOI模式下,处理器执行完中断处理程序后,必须手动向中断控制器发送中断结束
EOI指令,来复位ISR寄存器的对应位。- FNM(Fully Nested Mode,全嵌套模式):在此模式下,中断请求的优先级按引脚名从高到低依次为IR0~IR7。如果从8259A芯片的中断请求正在被处理,那么该从芯片将被主芯片屏蔽直至处理结束,即使从芯片产生更高优先级的中断请求也不会得到执行。
- SFNM(Special Fully Nested Mode,特殊全嵌套模式):该模式与FNM基本相同,不同点是当从芯片的中断请求正在被处理时,主芯片不会屏蔽该从芯片,这使得主芯片可以接收来自从芯片的更高优先级中断请求。在中断处理程序返回时,需要先向从芯片发送
EOI命令,并检测从芯片的ISR寄存器值,如果ISR寄存器仍有其他中断请求,则无需向主芯片发送EOI命令。
OCW
OCW由OCW 1 -- 3三个寄存器构成,这些都不是我们了解的重点,所以这里直接摘抄作者的书了:
OCW1寄存器
OCW1是中断屏蔽寄存器,该寄存器共有8位,每位的含义如表4-12所示。
表4-12 OCW1寄存器位功能说明
位 描述 7 1=屏蔽IRQ7中断请求,0=允许IRQ7中断请求 6 1=屏蔽IRQ6中断请求,0=允许IRQ6中断请求 5 1=屏蔽IRQ5中断请求,0=允许IRQ5中断请求 4 1=屏蔽IRQ4中断请求,0=允许IRQ4中断请求 3 1=屏蔽IRQ3中断请求,0=允许IRQ3中断请求 2 1=屏蔽IRQ2中断请求,0=允许IRQ2中断请求 1 1=屏蔽IRQ1中断请求,0=允许IRQ1中断请求 0 1=屏蔽IRQ0中断请求,0=允许IRQ0中断请求 这个寄存器非常好理解。但还请注意,尽量屏蔽掉不使用的中断请求引脚,以防止接收不必要的中断请求,进而导致中断请求过于拥堵。
OCW2寄存器
OCW2依然是个8位的寄存器,表4-13是其每位的含义。
表4-13 OCW2寄存器位功能说明
位 描述 7 优先级循环状态 6 特殊设定标志 5 非自动结束标志 4 恒为0 3 恒为0 0~2 优先级设定 对于OCW2寄存器的D5~D7位,它们可以组合成多种模式,表4-14记录了这些组合值代表的含义。
表4-14 OCW2寄存器的D5~D7位组合值含义
D7 D6 D5 含义 0 0 0 循环AEOI模式(清除) 0 0 1 非特殊 EOI命令(全嵌套方式)0 1 0 无操作 0 1 1 特殊 EOI命令(非全嵌套方式)1 0 0 循环AEOI模式(设置) 1 0 1 循环非特殊 EOI命令1 1 0 设置优先级命令 1 1 1 循环特殊 EOI命令循环模式(D7=1):8259A芯片使用一个8位的循环队列保存各引脚中断请求,当一个中断请求结束后,这个引脚的优先级将自动降为最低,然后排入优先级队列的末尾处,以此类推。
特殊循环(D7=1,D6=1):特殊循环模式在循环模式的基础上,将D0~D2位指定的优先级设置为最低优先级,随后再按照循环模式循环降低中断请求的优先级。
OCW3寄存器
OCW3同样是一个8位的寄存器,表4-15是对OCW3寄存器各位功能的描述。
表4-15 OCW3寄存器位功能说明
位 描述 7 恒为0 6、5 特殊屏蔽模式:11=开启特殊屏蔽,10=关闭特殊屏蔽 4 恒为0 3 恒为1 2 1=轮询,0=无查询 1、0 10=读IRR寄存器,11=读ISR寄存器 特殊屏蔽模式:在某些场合,我们希望中断处理程序能够被更低优先级的中断请求打断,采用特殊屏蔽模式,可在置位IMR寄存器(OCW1寄存器)的同时复位对应的ISR寄存器位,从而可以处理其他优先级的中断请求。
触发中断
在开始这个模块之前,请大家来回忆一下异常处理相关的内容:异常处理是如何被触发的?
- CPU在执行指令的时候检测到异常,检测到异常的时候,不同异常对应不同的异常向量
- 根据异常向量在IDT中进行检索,找到对应的异常处理门
- 保存现场,通过该门进行一次远跳转,进入异常处理例程
- 异常处理例程处理结束后,恢复现场
那么中断又应该被如何处理呢?实际上中断处理的过程与异常处理的过程完全相同,因为我们在异常处理那一节中就讲过了: 异常可能来源于中断、陷阱、系统调用、无效指令、溢出等等等等,换而言之中断就是异常的一种,那么中断和我们前面处理的又有什么不同呢?中断是由外部设备产生的任务暂停,而普通的异常就是处理器产生的暂停。
那么总体来说,他们的处理方法基本上还是完全一致的,那么我们按照原有的思路进行书写即可:
制作入口函数
保存现场
// 宏定义, 用于保存现场
#define SAVE_ALL \
"cld; \n\t" \
"pushq %rax; \n\t" \
"pushq %rax; \n\t" \
"movq %es, %rax; \n\t" \
"pushq %rax; \n\t" \
"movq %ds, %rax; \n\t" \
"pushq %rax; \n\t" \
"xorq %rax, %rax; \n\t" \
"pushq %rbp; \n\t" \
"pushq %rdi; \n\t" \
"pushq %rsi; \n\t" \
"pushq %rdx; \n\t" \
"pushq %rcx; \n\t" \
"pushq %rbx; \n\t" \
"pushq %r8; \n\t" \
"pushq %r9; \n\t" \
"pushq %r10; \n\t" \
"pushq %r11; \n\t" \
"pushq %r12; \n\t" \
"pushq %r13; \n\t" \
"pushq %r14; \n\t" \
"pushq %r15; \n\t" \
"movq $0x10, %rdx; \n\t" \
"movq %rdx, %ds; \n\t" \
"movq %rdx, %es; \n\t"
这里和error_code模块非常相似,也是用于保存中断事件发生时的通用寄存器的值的,但是不同的是,中断触发的过程中,是不会压入错误码的,所以这里无法复用error_code模块。
生成入口函数的宏定义
#define IRQ_NAME2(nr) nr##Interrupt(void)
#define IRQ_NAME(nr) IRQ_NAME2(IRQ##nr)
#define BUILD_IRQ(nr) \
void IRQ_NAME(nr); \
__asm__ ( SYMBOL_NAME_STR(IRQ)#nr"Interrupt: \n\t" \
"pushq $0x00 \n\t" \
SAVE_ALL \
"movq %rsp, %rdi \n\t" \
"leaq ResetFromInterrupt(%rip), %rax \n\t" \
"pushq %rax \n\t" \
"movq $"#nr", %rsi \n\t" \
"jmp DoIRQ \n\t" \
);
这段宏代码用于定义中断处理程序的入口部分,我们就不在讲解了。
使用宏定义生成入口函数
上面我们写了一个生成入口函数的宏定义,只需要给出中断向量号就可以生成相应的入口函数了,在这里使用这个宏定义来生成我们需要的入口函数:
BUILD_IRQ(0x20)
BUILD_IRQ(0x21)
BUILD_IRQ(0x22)
BUILD_IRQ(0x23)
BUILD_IRQ(0x24)
BUILD_IRQ(0x25)
BUILD_IRQ(0x26)
BUILD_IRQ(0x27)
BUILD_IRQ(0x28)
BUILD_IRQ(0x29)
BUILD_IRQ(0x2a)
BUILD_IRQ(0x2b)
BUILD_IRQ(0x2c)
BUILD_IRQ(0x2d)
BUILD_IRQ(0x2e)
BUILD_IRQ(0x2f)
BUILD_IRQ(0x30)
BUILD_IRQ(0x31)
BUILD_IRQ(0x32)
BUILD_IRQ(0x33)
BUILD_IRQ(0x34)
BUILD_IRQ(0x35)
BUILD_IRQ(0x36)
BUILD_IRQ(0x37)
// 定义并初始化中断处理函数表
void (* interrupt[24])(void) = {
IRQ0x20Interrupt,IRQ0x21Interrupt,IRQ0x22Interrupt,
IRQ0x23Interrupt,IRQ0x24Interrupt,IRQ0x25Interrupt,
IRQ0x26Interrupt,IRQ0x27Interrupt,IRQ0x28Interrupt,
IRQ0x29Interrupt,IRQ0x2aInterrupt,IRQ0x2bInterrupt,
IRQ0x2cInterrupt,IRQ0x2dInterrupt,IRQ0x2eInterrupt,
IRQ0x2fInterrupt,IRQ0x30Interrupt,IRQ0x31Interrupt,
IRQ0x32Interrupt,IRQ0x33Interrupt,IRQ0x34Interrupt,
IRQ0x35Interrupt,IRQ0x36Interrupt,IRQ0x37Interrupt,
};
入口函数定义完毕后,我们将其加入到一个数组中,该数组标记着不同中断向量所对应着的处理函数。根据我们的定义:
"jmp DoIRQ \n\t"
这些函数被执行后,都将跳转到DoIRQ函数进行统一处理。
在最后,我们使用一个函数,将这些信息录入到IDT表格中:
/**
* 初始化中断处理程序的地址
*/
void InitInterrupt(){
// 装载 IDT Table
for(int i = 32;i < 56;i++)
set_intr_gate(i , 2 , interrupt[i - 32]);
printk("8259A init \n");
// 设置寄存器
//8259A-master ICW1-4
io_out8(0x20,0x11);
io_out8(0x21,0x20);
io_out8(0x21,0x04);
io_out8(0x21,0x01);
//8259A-slave ICW1-4
io_out8(0xa0,0x11);
io_out8(0xa1,0x28);
io_out8(0xa1,0x02);
io_out8(0xa1,0x01);
//8259A-M/S OCW1
io_out8(0x21,0x00);
io_out8(0xa1,0x00);
sti();
}
到此为止,我们对中断的初始化就告一段落了,接下来就写一个函数DoIRQ来处理中断即可:
中断处理函数DoIRQ
// 中断处理程序DoIRQ
void DoIRQ(unsigned long regs,unsigned long nr) {
printk("DoIRQ:%#08x\t",nr); // 中断处理(直接输出)
io_out8(0x20,0x20); // 向主芯片返回信息
}
可以看到这里的IRQ处理非常的简易,仅仅是做了输出与例行返回。
测试
在makefile中添加新建的interrupt,并且在main.c中进行引入,在main.c中调用InitInterrupt函数进行中断函数的初始化,执行后结果如下:
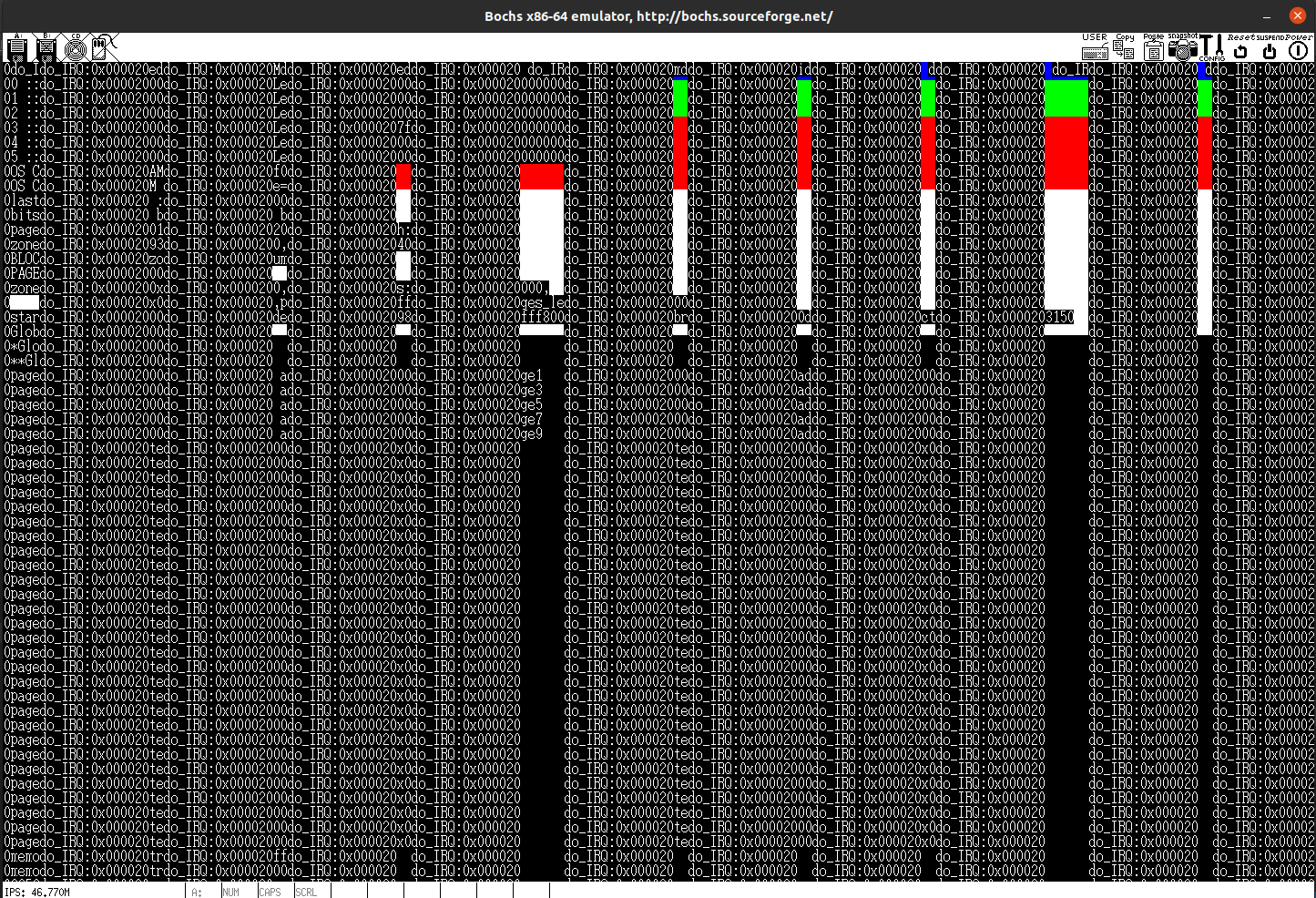
屏幕上不断的输出0x20的时钟中断。
之后的输出可能会很多,我们更改do_clear()函数,让其刷新整个屏幕(刷新缓冲区):
/**
* 给出当前的位置结构体,将光标置为(0, 0)[暂时不实现清空屏幕的功能]
* @param cur_position 一个指针,指向被操作的位置结构体
*/
void DoClear(struct Position * cur_position){
cur_position->x_position = 0;
cur_position->y_position = 0;
memset(cur_position->screen_buffer_base_address, 0x00, cur_position->screen_buffer_length);
}
当输出超过当前屏幕之后,屏幕会被清空(就像翻页了一样,只不过翻不回来了),执行结果如下:
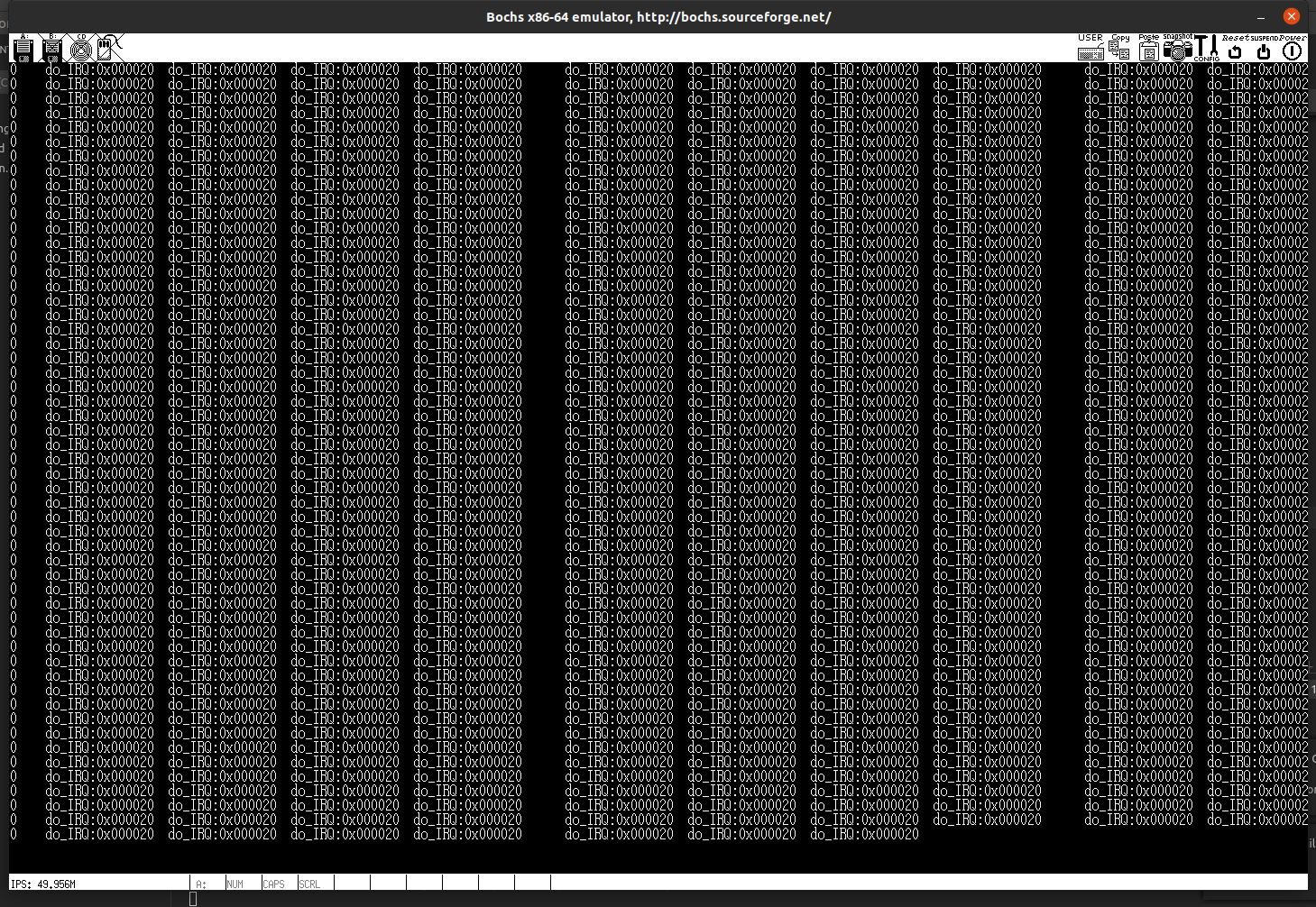
是的,没啥区别,就是好看了一点点。
键盘驱动
在开始键盘驱动这个部分之前,我们先来明确一下目的:就像上一节和上上节一样,我们在当前阶段的目的是学习、了解一个雏形,而非掌握全部知识。所以在这一节键盘驱动中,也是同理,我们将学习一个简单的键盘驱动模型,并且进行简单的实现。首先我们来看一张图:

在这个过程中,主要涉及到三个设备:
- 8259:主芯片,刚才已经介绍过了
- 8042:键盘控制器芯片,用于与键盘连通,用于处理相关的信号,也可以用来处理鼠标相关的信息
- 8048:键盘上面的芯片,当用户按键后会将相应的信息发送到8042
当键盘被按下后,8048会向8042发送信号;8042接收到信号后会将其编码为统一的键盘扫描码,并且将其放置在输出缓冲区中待处理器读取。如果处理器没有读取、清空的话,那么8042就不会接收8048传输的信息。
接下来我们要干的事情就是:接收中断信号,输出编码信息,清空缓冲区:
想要完成这些更改非常简单:
/**
* 初始化中断处理程序的地址
*/
void InitInterrupt(){
// 装载 IDT Table
for(int i = 32;i < 56;i++)
set_intr_gate(i , 2 , interrupt[i - 32]);
printk("8259A init \n");
// 设置寄存器
//8259A-master ICW1-4
io_out8(0x20,0x11);
io_out8(0x21,0x20);
io_out8(0x21,0x04);
io_out8(0x21,0x01);
//8259A-slave ICW1-4
io_out8(0xa0,0x11);
io_out8(0xa1,0x28);
io_out8(0xa1,0x02);
io_out8(0xa1,0x01);
//8259A-M/S OCW1
io_out8(0x21,0xfd);
io_out8(0xa1,0xff);
sti();
}
// 中断处理程序DoIRQ
void DoIRQ(unsigned long regs,unsigned long nr) {
printk("DoIRQ:%#08x\t",nr);
unsigned char x = io_in8(0x60);
printk("key code:%#08x\n",x);
io_out8(0x20,0x20);
}
更改结束后结果如下(我在bochs的界面中一顿操作后的结果):
进程管理
接下来我们进入到进程管理的模块,在这个模块中,我们先来了解什么是进程管理;进程管理需要管理哪些资源;我们会实现简单的进程机制并且创建出第一个进程;最终实现进程管理相应的内容,接下来我们先看第一个问题:
进程管理是什么?
首先需要说明的是,在这里我们讨论的是比较古老的CPU进程管理的模型。

我们都知道,对于单核单线程的CPU来说,CPU在同一时刻只能执行一条指令,不能执行多条指令。但是回想一下我们平时使用计算机的应用场景:我们在办公,带开了VSCode,又打开了QQ准备看看消息,那么这里的VSCode和QQ是两个毫不相干的app,他们两个就可以被看作两个进程,我们想用谁就用谁,但是从本质上来说他们两个不可能同时运行,只能以极快的速度进行交替,来达到同时运行的效果。那么在这个过程中来控制不同的进程如何切换、何时切换的就是进程管理机制了。
进程控制结构体
在上一小节中,我们知道了什么是进程,现在需要思考的是:想要管理进程,需要记录进程的哪些信息?
TaskStruct——进程信息描述结构体
/**
* 描述进程的资源使用情况的结构体
* @param list 双向链表,用于连接各个进程控制结构体
* @param state 用于记录进程的状态,随时可能改变,所以使用volatile关键字声明
* @param flags 进程标志,表示(线程、进程、内核线程)
* @param mm 内存空间分布描述结构体,用来描述程序段信息、内存页表等
* @param thread 进程切换时使得保留信息
* @param addr_limit 进程地址空间范围 0x00000000,00000000 - 0x00007FFF,FFFFFFFF为应用程,0xffff,8000,0000,0000 - 0xffff,ffff,ffff,ffff 为内核层
* @param pid 进程id
* @param counter 进程可用时间片
* @param signal 进程的信号量
* @param priority 进程的优先级
*/
struct TaskStruct {
struct List list;
volatile long state;
unsigned long flags;
struct MemoryStruct *mm;
struct thread_struct *thread;
/*0x0000,0000,0000,0000 - 0x0000,7fff,ffff,ffff 用户层*/
/*0xffff,8000,0000,0000 - 0xffff,ffff,ffff,ffff 内核层*/
unsigned long addr_limit;
long pid;
long counter;
long signal;
long priority;
};
这个结构体描述了一个进程需要拥有的一些基本信息,他们的意义已经在注释中写好了。其中的mm_struct、thread_struct还没有定义。除此之外,还是用了volatile关键词来声明state,这是因为进程的状态可能会在意想不到的地方被修改,所以需要每次使用该变量的时候,都从内存中直接读取,这样就可以保证使用该变量的最新版本了。
MemoryStruct——内存分布描述结构体
在这一小节中,我们来看一下上节中提到的MemoryStruct结构体:
/**
* 用于描述一个进程的内存空间的结构体
* @param pgd 内存页表指针(页目录基地址与页表属性的组合值)
* @param start_code 代码段起始地址
* @param end_code 代码段结束地址
* @param start_data 数据段起始地址
* @param end_data 数据段结束地址
* @param start_rodata 只读数据段起始地址
* @param end_rodata 只读数据段结束地址
* @param start_brk 堆区起始地址
* @param end_brk 堆区结束地址
* @param start_stack 应用层栈基址
*
*/
struct MemoryStruct {
pml4t_t *pgd;// 指向一个页表
unsigned long start_code,end_code;
unsigned long start_data,end_data;
unsigned long start_rodata,end_rodata;
unsigned long start_brk,end_brk;
unsigned long start_stack;
};
同理,可以通过注释就可以了解到一个进程对应的内存部分的描述信息了。
这里的pml4t_t的定义如下:
typedef struct {unsigned long pml4t;} pml4t_t;
#define mk_mpl4t(addr,attr) ((unsigned long)(addr) | (unsigned long)(attr))
#define set_mpl4t(mpl4tptr,mpl4tval) (*(mpl4tptr) = (mpl4tval))
thread_struct——进程调度切换现场
/**
* 用于保存进程调度、切换的现场
* @param rsp0 内核层栈基地址
* @param rip 内核层代码指针
* @param rsp 内核层当前栈指针
* @param fs 相应寄存器
* @param gs 相应寄存器
* @param cr2 相应寄存器
* @param trap_nr 异常号
* @param error_code 错误码
*/
struct thread_struct {
unsigned long rsp0;
unsigned long rip;
unsigned long rsp;
unsigned long fs;
unsigned long gs;
unsigned long cr2;
unsigned long trap_nr;
unsigned long error_code;
};
TaskUnion——使用联合体分配内核层的栈与进程描述子空间
什么是联合体?
联合体使用union来进行声明,和struct类似,在一个union中可以声明多个属性,但是不同点在于:结构体中所有成员线性排列,互不影响,联合体中所有成员都挤在一起,一定会互相影响,我们来看一下这里的TaskUnion:
/**
* task_struct和内核层栈区共用一段内存
* task --> stack 两者公用 stack的空间
*/
union TaskUnion {
struct TaskStruct task;
unsigned long stack[STACK_SIZE / sizeof(unsigned long)];
}__attribute__((aligned (8))); //8 Bytes align
这里生成了一个联合体,我们来看一下他的内存结构,为了演示他的内存结构,我们来单独写一个小程序:
#include
#define STACK_SIZE 1234
union TaskUnion {
int temp;
unsigned long stack[STACK_SIZE / sizeof(unsigned long)];
}__attribute__((aligned (8))); //8 Bytes align
int main(){
union TaskUnion temp;
printf("%ld,%ld\n", &(temp.temp), (temp.stack));
return 0;
}
运行结果如下:
140736676612912,140736676612912
换而言之:temp成员和stack成员的首地址相同,他们享有同样的内存空间,可以通过不同类型的成员完成不同类型的调用,放到我们这个联合体中就是:

将task_union实例化
/** 实例化第一个进程 */
struct TaskStruct *init_task[NR_CPUS] = {&init_task_union.task,0};
struct MemoryStruct init_mm = {0};
// 初始化调用现场
struct thread_struct init_thread = {
.rsp0 = (unsigned long)(init_task_union.stack + STACK_SIZE / sizeof(unsigned long)),
.rsp = (unsigned long)(init_task_union.stack + STACK_SIZE / sizeof(unsigned long)),
.fs = KERNEL_DS,
.gs = KERNEL_DS,
.cr2 = 0,
.trap_nr = 0,
.error_code = 0
};
// 零号进程的实例
union TaskUnion init_task_union __attribute__((__section__ (".data.init_task"))) = (union TaskUnion){
.task = {
.state = TASK_UNINTERRUPTIBLE,
.flags = PF_KTHREAD,
.mm = &init_mm,
.thread = &init_thread,
.addr_limit = 0xffff80000000000,
.pid = 0,
.counter = 1,
.signal = 0,
.priority = 0
}
};
在这里,我们init_task_union放到了.data.init_task这个程序段中,放入后我们在链接脚本中,对该段进行特殊的说明,添加的部分如下:
.rodata : {
_rodata = .;
*(.rodata)
_erodata = .;
}
. = ALIGN(32768);
.data.init_task : {
*(.data.init_task) }
实质上这里多出来了一个只读数据区,并且将刚才实例化的union放到了这个只读数据区中,实现的方法是将.data.init_task : { *(.data.init_task) }放置到了.rodata部分下。同时在放置的时候,使用32KB对齐的方法,可以避免今后申请空间时产生的隐患。
TSSStruct——IA-32e模式下的tss结构
声明
struct TSSStruct{
unsigned int reserved0;
unsigned long rsp0;
unsigned long rsp1;
unsigned long rsp2;
unsigned long reserved1;
unsigned long ist1;
unsigned long ist2;
unsigned long ist3;
unsigned long ist4;
unsigned long ist5;
unsigned long ist6;
unsigned long ist7;
unsigned long reserved2;
unsigned short reserved3;
unsigned short iomapbaseaddr;
}__attribute__((packed));
实例化:
struct TSSStruct init_tss[NR_CPUS] = {
[0 ... NR_CPUS-1] = {
.reserved0 = 0,
.rsp0 = (unsigned long)(init_task_union.stack + STACK_SIZE / sizeof(unsigned long)),
.rsp1 = (unsigned long)(init_task_union.stack + STACK_SIZE / sizeof(unsigned long)),
.rsp2 = (unsigned long)(init_task_union.stack + STACK_SIZE / sizeof(unsigned long)),
.reserved1 = 0,
.ist1 = 0xffff800000007c00,
.ist2 = 0xffff800000007c00,
.ist3 = 0xffff800000007c00,
.ist4 = 0xffff800000007c00,
.ist5 = 0xffff800000007c00,
.ist6 = 0xffff800000007c00,
.ist7 = 0xffff800000007c00,
.reserved2 = 0,
.reserved3 = 0,
.iomapbaseaddr = 0
}
};
这里的tss结构体使用__attribute__((packed))进行声明,这个我们之前也接触过了,这是紧凑结构,不会对变量进行字节对齐。
PTRegs —— 用于记录调用现场的结构体
struct PTRegs {
unsigned long r15;
unsigned long r14;
unsigned long r13;
unsigned long r12;
unsigned long r11;
unsigned long r10;
unsigned long r9;
unsigned long r8;
unsigned long rbx;
unsigned long rcx;
unsigned long rdx;
unsigned long rsi;
unsigned long rdi;
unsigned long rbp;
unsigned long ds;
unsigned long es;
unsigned long rax;
unsigned long func;
unsigned long errcode;
unsigned long rip;
unsigned long cs;
unsigned long rflags;
unsigned long rsp;
unsigned long ss;
};
之后我们会实现系统调用,系统调用的执行过程与我们之前接触到的中断与异常类似。我们同样需要记录一些寄存器在调用前的值,调用前的值被存储在该结构体中。
get_current——获取当前进程
首先我们来研究一下,我们是怎么获取当前进程描述结构体的首地址的,来看下面这张图(参考自 : 《内核 current宏解析》):

一个线程对应着两个栈,一个是内核栈还有一个是用户栈,sp指针指向内核栈。图中的结构就是我们定义的:TaskUnion,现在我们知道这个TaskUnion的中间地址了,我们该如何得知这个联合体的首地址呢?这就要用到刚才定义的32Btye对齐了,当他是三十二字节对其的情况下,我们直接将当前地址向前对齐就可以得到首地址了。当然了,值得注意的是我们的栈大小为32Byte,和上图所示有细微的差异,不过整体来说方法完全相同:
inline struct TaskStruct * get_current() {
struct TaskStruct * current = NULL;
__asm__ __volatile__ ("andq %%rsp,%0 \n\t":"=r"(current):"0"(~32767UL));
return current;
}
#define current get_current()
#define GET_CURRENT \
"movq %rsp, %rbx \n\t" \
"andq $-32768,%rbx \n\t"
init 进程
在上面的程序中,我们声明并初始化了第一个进程的描述结构体:init_task_union,并且了解了进程信息是如何保存的,以及如何通过地址对齐获得当前执行的进程。下面我们将继续学习进程相关的内容:
进程切换函数
#define switch_to(prev,next) \
do{ \
__asm__ __volatile__ ( "pushq %%rbp \n\t" \
"pushq %%rax \n\t" \
"movq %%rsp, %0 \n\t" \
"movq %2, %%rsp \n\t" \
"leaq 1f(%%rip), %%rax \n\t" \
"movq %%rax, %1 \n\t" \
"pushq %3 \n\t" \
"jmp __switch_to \n\t" \
"1: \n\t" \
"popq %%rax \n\t" \
"popq %%rbp \n\t" \
:"=m"(prev->thread->rsp),"=m"(prev->thread->rip) \
:"m"(next->thread->rsp),"m"(next->thread->rip),"D"(prev),"S"(next) \
:"memory" \
); \
}while(0)
可以看到,这个switch_to在做的事情实际上就是:将RDI和RSI寄存器的值作为参数传递给__switch_to函数,然后再在__switch_to函数中进行具体的处理,接下来继续看__switch_to函数:
/**
* 进程切换的处理函数, 得到当前和下一个进程的地址, 进行切换
*/
void __switch_to(struct TaskStruct *prev,struct TaskStruct *next) {
init_tss[0].rsp0 = next->thread->rsp0;
set_tss64(init_tss[0].rsp0, init_tss[0].rsp1, init_tss[0].rsp2, init_tss[0].ist1, init_tss[0].ist2, init_tss[0].ist3, init_tss[0].ist4, init_tss[0].ist5, init_tss[0].ist6, init_tss[0].ist7);
__asm__ __volatile__("movq %%fs, %0 \n\t":"=a"(prev->thread->fs));
__asm__ __volatile__("movq %%gs, %0 \n\t":"=a"(prev->thread->gs));
__asm__ __volatile__("movq %0, %%fs \n\t"::"a"(next->thread->fs));
__asm__ __volatile__("movq %0, %%gs \n\t"::"a"(next->thread->gs));
printk("prev->thread->rsp0:%#018lx\n",prev->thread->rsp0);
printk("next->thread->rsp0:%#018lx\n",next->thread->rsp0);
}
这里进行了如下操作:
- 将
next进程的内核层栈基地址设置到TSS结构体对应的成员变量中。 - 保存当前进程的FS与GS段寄存器值
- 将
next进程保存的寄存器信息还原
使用进程切换函数
/**
* 初始化init进程, 并且进行进程切换
*/
void TaskInit() {
struct TaskStruct *p = NULL;
// 初始化初始进程
init_mm = (struct MemoryStruct){
(pml4t_t *)Global_CR3,
memory_management_struct.start_code, memory_management_struct.end_code,
(unsigned long)&_data, memory_management_struct.end_data,
(unsigned long)&_rodata, (unsigned long)&_erodata,
0, memory_management_struct.end_brk,
_stack_start
};
set_tss64(init_thread.rsp0, init_tss[0].rsp1, init_tss[0].rsp2, init_tss[0].ist1, init_tss[0].ist2, init_tss[0].ist3, init_tss[0].ist4, init_tss[0].ist5, init_tss[0].ist6, init_tss[0].ist7);
init_tss[0].rsp0 = init_thread.rsp0;
list_init(&init_task_union.task.list); // 将当前的前后都置为自己
CreateKernelThread(init, 10, CLONE_FS | CLONE_FILES | CLONE_SIGNAL);
init_task_union.task.state = TASK_RUNNING;
p = CONTAINER_OF(list_next(¤t->list),struct TaskStruct,list);
switch_to(current,p);
}
这个函数可以分为前后两段:
-
前半段中, 对
init进程的内存结构进行了设置,其中_stack_start是一个全局变量,其定义如下:ENTRY(_stack_start) .quad init_task_union + 32768 -
后半段中
CreateKernelThread使用init函数创建出了第二个进程,并且使用switch_to宏定义进行了函数之间的切换。这个被创建出来,并且切换过去的进程就是init进程。这里传入的
init如下:/** * 第一个进程,清空屏幕并输出Hello World! 激动人心的时刻! */ unsigned long init(unsigned long arg) { DoClear(&global_position); printk("Hello World!\ninit task is running,arg:%#018lx\n",arg); return 1; }有了
init进程需要执行的程序,接下来我们调用了CreateKernelThread来为操作系统创建进程:/** * 创建进程的函数, 传入一个函数指针以及一些参数, 为操作系统创建一个进程 */ int CreateKernelThread(unsigned long (* fn)(unsigned long), unsigned long arg, unsigned long flags) { struct PTRegs regs; // 用于保存现场的结构体 memset(®s,0,sizeof(regs)); regs.rbx = (unsigned long)fn; regs.rdx = (unsigned long)arg; regs.ds = KERNEL_DS; regs.es = KERNEL_DS; regs.cs = KERNEL_CS; regs.ss = KERNEL_DS; regs.rflags = (1 << 9); regs.rip = (unsigned long)KernelThreadFunc; return DoFork(®s,flags,0,0); }在这个函数中,我们创建了一个
PTRegs结构体,来为新的进程准备执行现场的数据,我们最需要关注其中的两点-
regs.rip = (unsigned long)KernelThreadFunc;:将KernelThreadFunc的入口进行保存,在执行相应进程前,会先执行KernelThreadFunc函数。 -
DoFork(®s,flags,0,0):将新进程的执行现场数据传递给DoFork函数,进行进一步处理 -
DoFork函数的实现unsigned long DoFork(struct PTRegs * regs, unsigned long clone_flags, unsigned long stack_start, unsigned long stack_size) { struct TaskStruct *tsk = NULL; struct thread_struct *thd = NULL; struct Page *p = NULL; printk("AllocPages,bitmap:%#018lx\n",*memory_management_struct.bits_map); p = AllocPages(ZONE_NORMAL,1,PG_PTable_Maped | PG_Active | PG_Kernel);// 申请页 printk("AllocPages,bitmap:%#018lx\n",*memory_management_struct.bits_map); tsk = (struct TaskStruct *)CONVERT_PHYSICAL_ADDRESS_TO_VIRTUAL_ADDRESS(p->PHY_address); // 将线程描述子放到相应的页中 printk("struct TaskStruct address:%#018lx\n",(unsigned long)tsk); memset(tsk,0,sizeof(*tsk)); // 复制当前进程(复制的是势力, 没有改变指针指向的位置) *tsk = *current; list_init(&tsk->list); list_add_to_before(&init_task_union.task.list,&tsk->list); // 添加关系, 链接入进程队列并且伪造执行现场 tsk->pid++; tsk->state = TASK_UNINTERRUPTIBLE; thd = (struct thread_struct *)(tsk + 1); tsk->thread = thd; memcpy(regs,(void *)((unsigned long)tsk + STACK_SIZE - sizeof(struct PTRegs)),sizeof(struct PTRegs)); thd->rsp0 = (unsigned long)tsk + STACK_SIZE; thd->rip = regs->rip; thd->rsp = (unsigned long)tsk + STACK_SIZE - sizeof(struct PTRegs); // 如果 if (!(tsk->flags & PF_KTHREAD)) // 进程运行于应用层空间, 就将预执行函数设置为: ResetFromInterrupt thd->rip = regs->rip = (unsigned long)ResetFromInterrupt; tsk->state = TASK_RUNNING; return 0; }在这个函数中:
- 我们首先为新的进程设置了内存空间
- 然后将当前进程控制结构体中的数据复制到新分配物理页中,并进一步初始化
- 最后根据程序是否运行在应用层空间,设置不同的执行函数(这里的
ResetFromInterrupt是在异常处理阶段定义的函数,用于恢复异常处理现场)
-
KernelThreadFunc的实现extern void KernelThreadFunc(void); __asm__ ( "KernelThreadFunc: \n\t" " popq %r15 \n\t" " popq %r14 \n\t" " popq %r13 \n\t" " popq %r12 \n\t" " popq %r11 \n\t" " popq %r10 \n\t" " popq %r9 \n\t" " popq %r8 \n\t" " popq %rbx \n\t" " popq %rcx \n\t" " popq %rdx \n\t" " popq %rsi \n\t" " popq %rdi \n\t" " popq %rbp \n\t" " popq %rax \n\t" " movq %rax, %ds \n\t" " popq %rax \n\t" " movq %rax, %es \n\t" " popq %rax \n\t" " addq $0x38, %rsp \n\t" / " movq %rdx, %rdi \n\t" " callq *%rbx \n\t" " movq %rax, %rdi \n\t" " callq DoTaskExit \n\t" );这一段代码负责还原进程执行现场、运行进程以及退出进程,退出进程前,会执行
DoTaskExit函数退出进程。-
DoTaskExit实现:unsigned long DoTaskExit(unsigned long code) { printk("exit task is running,arg:%#018lx\n",code); while(1){ // Endless loop continue;
}
return 0UL;}
-
-
-
回到
TaskInit函数, 我们后面使用宏定义CONTAINER_OF获得了对应的结构体,并且使用switch_to进行了切换。#define CONTAINER_OF(ptr,type,member) \ ({ \ typeof(((type *)0)->member) * p = (ptr); \ (type *)((unsigned long)p - (unsigned long)&(((type *)0)->member)); \ })总体来说这段程序非常让人崩溃,其中最重要的就是:
- 0指针的使用:
typeof(((type *)0)->member) * p = (ptr);:获取给出的成员的地址(unsigned long)&(((type *)0)->member)): 这里的(((type *)0)->member))可以计算出该成员相对该结构体头部地址的相对地址,那么该成员的地址减掉该成员的相对地址,就是该结构体的地址了。
- 0指针的使用:
测试与调试
如果你在过程中和我一样出现了问题,你可以看一下这一部分,我的主要问题在于:触发了保护中断,这是由于内存地址错误而导致的,通过观察我们异常处理的输出(RIP寄存器)我的错误定位在:从__switch_to函数退出时,执行ret语句时,出现了错误。于是我联想到这可能是因为退出后跳转到的地址有误而触发的中断,遂使用printk语句输出了将要跳转到的KernelThreadFunc函数的地址,果然,该函数地址存在错误,引发了cpu产生中断。
解决方法: 我这里并没有对这个错误产生的原因过度追究,因为我不大想学太多汇编的知识,还是希望将注意力集中在主线任务上。但是还是可以通过以往的经验提供一条行之有效的解决方案:将KernelThreadFunc的定义迁移到entry.S中,声明为全局变量即可,声明如下:
.global KernelThreadFunc
KernelThreadFunc:
popq %r15
popq %r14
popq %r13
popq %r12
popq %r11
popq %r10
popq %r9
popq %r8
popq %rbx
popq %rcx
popq %rdx
popq %rsi
popq %rdi
popq %rbp
popq %rax
movq %rax, %ds
popq %rax
movq %rax, %es
popq %rax
addq $0x38, %rsp
movq %rdx, %rdi
callq *%rbx
movq %rax, %rdi
callq DoTaskExit
同理,我们在task.h中使用extern语句进行引用即可。
运行测试
在main.c中的 Start_Kernel函数中加入TaskInit函数:
InitMemory(); // 输出所有内存信息
InitInterrupt();
TaskInit();
使用bochs虚拟机进行执行:

其中,下面的四条信息是由键盘中断产生的(要截屏得嘛),上面的信息是由我们的init进程以及exit函数输出的。
这一章花了我三个周的时间,在前一个半周我就已经将全部内容基本完成了,在后一个半周中我陷入了刚才所说的bug中,再加之我还有挺多其他的事情要做,遂多次产生过想要放弃的想法,但是最后还是稳定住了心态,一次一次的找错最后才把这个问题解决。