基于STM32的半导体制冷片控制系统设计
一些医疗检测仪器在检测时需要模拟人体温度环境以确保检测的精确性,本文以STM32为主控制器,电机驱动芯片DRV8834 为驱动器,驱动半导体致冷器(帕尔贴)给散热片加热或者制冷。但由于常规的温度控制存在惯性温度误差的问题,无法兼顾高精度和高速性的严格要求,所以采用模糊自适应PID控制方法在线实时调整PID参数,计算PID参数Kp、Ki、Kd调整控制脉冲来控制驱动器的使能。从simulink仿真的和实验结果来看模糊PID控制系统精度高、响应速度快,能达到预期效果。
温度参数是工业生产中常用的被控对象之一,在化工生产、冶金工业、电力工程和食品加工等领域广泛应用,在医疗检测设备中时常需要模拟人体温度进行成分检测。采用直流电机驱动芯片DRV8834驱动帕尔贴的制冷和加热过程。温度随时间的变化率和变化的方向不确定且可能大幅度的变化,要求系统的实际温度快速和精确地跟踪设定温度以满足加工工艺的要求。时间程序温度控制系统具有强烈的非线性、强耦合、大时滞和时变等特点,传统PID控制虽然算法简单易于实现且调整时间较快、精度较高,但是抗干扰能力不强,容易产生振荡;模糊PID不需要精确的数学模型,能较好的处理时变、非线性、滞后等问题,有很好的鲁棒性,响应速度快。
1 过程分析及常规控制方法
恒温控制系统具有制冷、加热等功能,箱体内的温度传感器DS18B20通过不断地检测温度,与设置的很定温度作比较,当室内温度低于设置温度值时,加热模块工作,使DRV 8834输出正向直流,驱动帕尔贴元器件,使其加热;当温度高于设置温度值时,使DRV8834输出反向直流,驱动帕尔贴元器件,使其工作在制冷功能。使室内温度在设定值范围内震荡,最终趋向于稳定。同时,控制系统将协调控制制冷和加热系统,以达到箱温波动值最小、高精度控温的目标。所以温度控制成为恒温控制系统的核心问题。
2 模糊PID温度控制系统的硬件电路设计
如图1,系统主要包括以下几个部分:
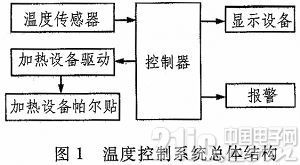
1)数字温度传感器:DS18B20是一种“一线总线”接口的温度传感器。与传统的热敏电阻等测温元件相比,它是一种新型的体积小、适用电压宽、与微处理器接口简单的数字化温度传感器,实现温度的采集。
2)控制器:采用STM32模块和存储器构成,以其丰富的外部资源和高达72 MHz的主频完成大量的PID运算。
3)加热模块:采用驱动芯片DRV8834,是一款双路桥式步进器或者直流电机驱动器。由于加热器帕尔贴是由直流控制发热或者制冷,所以用DRV8834用作直流电机驱动器来驱动帕尔贴。
DRV8834能够驱动两个直流电机或者一个步进电机,每个H桥的电流输出为1.5 A,2.2 A峰值电流,所以用1.5 A电流驱动帕尔贴加热元器件。该器件提供了带有一个故障输出引脚的内部关断功能,此功能用于过流保护、短路保护、欠压闭锁和过热。另外,还提供了一种低功耗睡眠模式以节约电能和增加元器件使用寿命。
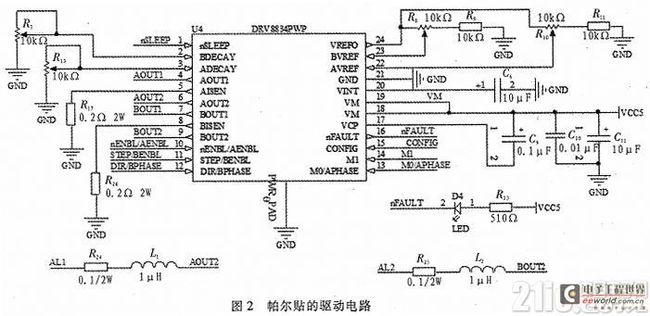
如图2,nSLEEP引脚控制驱动芯片的睡眠模式,低电平进入睡眠模式,由STM32的I/O控制;AOUT1和AOUT2为桥A的两个输出端,(这里接帕尔贴的两个输入端),并且在AOUT端串联一个0.1欧姆的电阻和1uH的电感来模拟直流电机负载;VREFO为参考电压的输出;AVREF和 BVREF通过滑动变阻器改变输入的电压,结合AISEN端的电阻设置斩波电流的输出,斩波电流计算公式:
![]()
AENABL引脚是DRV8834芯片的使能芯片;DIR引脚控制桥电流的输出方向,这里可以控制帕尔贴的加热或制冷;nFAULT引脚在芯片正常工作时输出高电平,当输出低电平时表示芯片过温、过流或者欠压以指示芯片的工作状态;VM输入5 V电压供电。
3 模糊PID温度控制系统的软件设计
3. 1 模糊控制基本原理
模糊控制是以模糊集合理论、模糊语言及模糊逻辑为基础的控制,它是模糊数学在控制系统中的应用,是一种非线性智能控制。
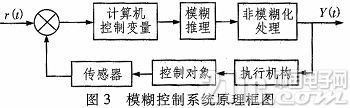
本文在常规PID基础上,以温度反馈值与目标值的误差e和误差变化率ec作为输入,一方面送入模糊控制器用模糊推理的方法计算PID参数的调整系数,进行在线自整定,以满足不同e和ec对控制器参数的不同要求。
温度控制的软件设计主要包含3个部分:系统的初始化,模糊PID的计算,驱动电路的控制。其控制流程如图4所示。
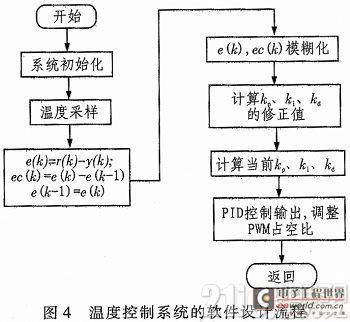
其中系统初始化包含STM32系统时钟的初始化,I/O口的初始化,数字温度传感器DS18B20的初始化,显示模块的初始化等。模糊PID的计算是 e(k)和ec(k)的值输入到模糊控制规则表然后去模糊化算出Kp、Ki、Kd的当前值。PID控制输出的控制量是STM32定时器的计数值以控制 PWM输出的占空比,PWM输出连接到帕尔贴驱动器的使能引脚控制电流的输出的通断,从而控制帕尔贴的发热量。
3.2 模糊划分及模糊化
设温度偏差e的基本论域为[-30℃,+30℃],温度偏差变化率ec的基本论域为[-12,+12],输出u的基本论域为 [-0.4,+0.4],e、ec和u的语言变量E、EC和U,均划分为7个变量等级(NB,NM,NS,Z,PS,PM,PB),各个变量的模糊论域范围为:
{E)={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
{Ec}={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
{U}={-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}。
对于模糊控制器而言,温度偏差及其变化率都是精确输入量,为了对确定的精确量进行模糊化,必须把它们转换成模糊集合的隶属函数。由于三角形函数计算较简单、性能较好,输入/输出变量的隶属度函数都采用三角形分布。
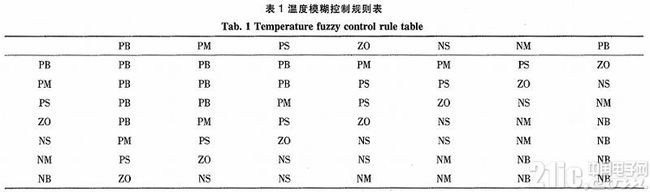
3.3 模糊控制规则
确定模糊控制规则的原则必须是系统输出响应的动、静态特性达到最佳。当误差大或较大时,选择控制量以尽快消除误差为主;而当误差较小时,选择控制量要注意防止超调,以系统的稳定性为主要出发点。
本研究根据实际运行经验进行了试验、分析、归纳,并得出一系列控制规则为:
3.4 simulink的仿真对比
采用模糊自适应PID控制与常规PID控制作对比,体现出模糊自适应在温度控制方面的优越性。帕尔贴加热散热片可以看成是一个具有时滞特性的一阶惯性环节,其传递函数为:

其中k取4,τ取500,延时部分在simulink中串联一个Transport Delay模块,延时时间取3 s。
如图5,上半部分为模糊自适应PID控制,输入的信号通过迷糊控制器算出Kp、Ki、Kd的修正值,然后加上Kp、Ki、Kd的经验值来对传递函数起作用。下面半部分就为普通的PID控制。通过虚拟的示波器观察两种控制方法的控制效果。
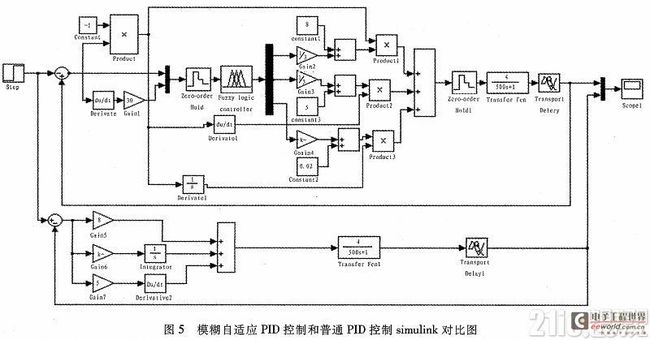
红色曲线为普通PID控制的输出曲线,黄色曲线为模糊自适应PID控制的输出曲线,通过对比可以发现,传统的PID控制存在严重的超调,并在预期值上下震荡,调整时间长。模糊自适应PID控制很好的解决了这个问题,以最快的时间最小的超调达到系统稳定。
4 结束语
本次实验采用了常用的直流电机驱动器通过适当调整电路运用到半导体制冷器件上,电路简单成本也较低。软件设计上运用PID模糊控制有效的解决了温度控制的惯性和延迟问题,实验基于STM32控制器充分利用其固件库函数大大减少了开发周期,提高了效率。此系统可以运用在医疗设备、家用小电器等一些用到温度控制的场合中,具有一定代表性。
关键字:STM32 半导体 制冷片控制系统
来源: 21ic 引用地址:http://www.eeworld.com.cn/mcu/article_24483.html
本网站转载的所有的文章、图片、音频视频文件等资料的版权归版权所有人所有,本站采用的非本站原创文章及图片等内容无法一一联系确认版权者。如果本网所选内容的文章作者及编辑认为其作品不宜公开自由传播,或不应无偿使用,请及时通过电子邮件或电话通知我们,以迅速采取适当措施,避免给双方造成不必要的经济损失。
上一篇:STM32F407高速USB口速度测试
下一篇:传感器智能采集传输控制系统的研究与设计

关注eeworld公众号
快捷获取更多信息

关注eeworld服务号
享受更多官方福利
0
推荐阅读
C51、STM32和S3C2440中断体系的比较
/* 名称:C51、STM32和S3C2440中断体系的比较 说明:对于这三个芯片的中断体系来说,就我目前了解的, 我说:差不多。这里说的差不多,是中断的本质上差不多,都是首先中断源提出申请(比如触发了外部中断,定时器中断等),然后经过中断源屏蔽寄存器,再然后中断优先级的比较,最后CPU相应中断。(我去,这好像又回到了计算机组成原理啊)。不同的是细节,C51作为低级一点的芯片,其中断少,中断能达到的功能也少,相对来说较为简单些(无论是设计还是具体使用)。而STM32和S3C2440来说,其提供的功能较多,设计起来和使用起来要复杂的多(使用的时候得配置好多好多寄存器)。目前总结的,差不多就是这些吧。*/
发表于 2018-07-21 14:40:54
STM32_GPIO之按键输入
/* 名称:STM32_GPIO之按键输入 说明:这个实验是GPIO的输入功能。基本的思路和51单片机差不多。也是 操作相应的IO口,不过不同的是对于独立按键输入实验来说,51单片机是 需要一开始把待检测的IO口设置成高电平,然后检测其何时被拉低。而对 于STM32来说,其GPIO端口就可以设置成上拉输入,即不需要再人为的把对 应的对应的IO口设置成高电平,硬件电路会自动把对应端口引脚拉成高电 平。还有一点关于条件编译要说的:这个ifndef… #endif 一般用在头文件中。书上说为了防止重复编译。就我目前了解的来看,在实际应用中,如果在两个.c源文件中都
发表于 2018-07-21 14:37:58
STM32之利用I2C协议读写EEPROM
/* 名称:STM32之利用I2C协议读写EEPROM 说明: 1.利用STM32来读写EEPROM和C51最大的不同就是,前者是直接使用I2C控制器(硬件方式)来产生所需要的I2C时序,而后者是通过软件方式来产生I2C时序。相对来说,前者使用硬件电路简化了编程的复杂性,用户只要将数据发送到相应的数据寄存器,然后I2C控制器自动按照I2C协议把数据通过SCL和SDA总线发送出去。而后者,你必须按照I2C协议手动产生SCL和SDA的高低电平。当然对于EEPROM来说,它是感受不到发送来的数据是通过硬件电路还是软件方式产生的。2.还有,STM32内部集成的I2C控制器不仅可以产生时序,还包括了一些
发表于 2018-07-21 14:36:16
STM32有关GPIO引脚的一些问题
/* 名称:STM32有关GPIO引脚的一些问题 说明:今天在编写一个键盘扫描程序的时候,出现了一些问题。 有的引脚能读出电平状态、有点引脚确一直读不出状态。改了一下午,查了好久,终于有点眉目了。现简述如下: 我在用引脚的时候,使用的是PB0、PB1、PB2、PB3、PB4…,将其引脚配置的方式是上拉输入。PB2、PB3、PB4一直有问题。PB0、PB1是可以读出状态的(但是只能单独使用)。对于PB2来说,其不仅是PB2,它也是BOOT1引脚。当系统复位之后,开始的几个系统时钟使用的是BOOT1,用来判断系统从何处读取置零。之后,PB2就可以作为普通的IO引脚使用了。由于开发板设置
发表于 2018-07-21 12:22:43
STM32定时器之控制LED灯循环显示
/* 名称:STM32定时器之控制LED灯循环显示 说明:对于STM32来说,其定时器要比C51的定时器要多,功能也更复杂。就数目来说来说,STM32的定时器可以分为基本定时器,通用定时器和高级定时器(还包括Systick、看门口定时器和窗口定时器)。就STM32F103,一般来说,它有2个高级定时器TIM1和TIM8、4个通用定时器TIM2/3/4/5、2个基本定时器TIM6和TIM7。而C51一般只有几个定时器。就功能来说, STM32中: 对于基本定时器,其功能就是和C51差不多,只有定时功能。 对于通用定时器,它的功能有定时、输出比较、输入捕获。虽然目前,我也不知道后面两个
发表于 2018-07-21 11:56:24
STM32之LED按键中断
***************************************************************************************************************************************开发板 :奋斗STM32CPU :STM32F103开发环境:keil uVsion4
发表于 2018-07-21 11:48:43
更多
热门资源推荐
-
 6英寸重掺砷硅单晶及抛光片
6英寸重掺砷硅单晶及抛光片 -
 ARM STM32F103RBT6 循迹 小车 TCRT5000 三探头 C代码
ARM STM32F103RBT6 循迹 小车 TCRT5000 三探头 C代码 - STM32 printf实验,来源《STM32 嵌入式微控制器快速上手》,很基础,不错的例程
- 基于STM32F103RBT6的GPIO中断控制机LED显示控制(基于MDK编程模板)
- 嵌入式学习路线建议
- 给你详细分析变频器是怎样控制电机转速的
- 超经典的《成为LED专家的秘籍基础篇》
- matlab数学建模实例与编程教程
小广播
ADI 伺服电机控制解决方案
Littelfuse直播:碳化硅(SiC) MOSFET和肖特基二极管产品介绍及相关应用
11月22日开播,马上预约观看有礼~
有奖直播:瑞萨电子安全物联网套件为您提供安全云联接解决方案
即日起-2018年11月20日
大咖面对面|走进Digi-Key和DFRobot
直播:英特尔FPGA可编程加速平台介绍,走近AI、数据中心、基因工程等大咖工程
即日起至11月8日,预约观看有礼~
TI模拟芯片选型指南,专为简单而生!
即日起-2018年12月17日
NI汽车研发测试总动员 挑战难题,赢取汽车碎片抽好礼
即日起-2018年11月16日
答题有礼送样片:安森美半导体重磅推出超低功耗蓝牙芯片 RSL10
即日起-2018年11月9日
2018年的全球半导体设备支出预估约630亿美元
机遇与挑战?看受益者TEL的中国战略
TI 最新应用方案,助力更智能的开发设计
>>抢先查看
ADI 伺服电机控制解决方案
Littelfuse直播:碳化硅(SiC) MOSFET和肖特基二极管产品介绍及相关应用
11月22日开播,马上预约观看有礼~
有奖直播:瑞萨电子安全物联网套件为您提供安全云联接解决方案
即日起-2018年11月20日
大咖面对面|走进Digi-Key和DFRobot
直播:英特尔FPGA可编程加速平台介绍,走近AI、数据中心、基因工程等大咖工程
即日起至11月8日,预约观看有礼~
TI模拟芯片选型指南,专为简单而生!
即日起-2018年12月17日
NI汽车研发测试总动员 挑战难题,赢取汽车碎片抽好礼
即日起-2018年11月16日
答题有礼送样片:安森美半导体重磅推出超低功耗蓝牙芯片 RSL10
即日起-2018年11月9日
2018年的全球半导体设备支出预估约630亿美元
机遇与挑战?看受益者TEL的中国战略
TI 最新应用方案,助力更智能的开发设计
>>抢先查看
热门活动
换一批
更多

■有奖直播:瑞萨电子安全物联网套件为您提供安全云联接解决方案
■帮忙他人,成就自我——EEWORLD问答榜(10期)
■等值现金悬赏,等你揭榜!
■有奖直播 11月27日上午10:00 准时开启!富士通赋能汽车电子技术变革
最新单片机文章
- LPC54608生成PDF文件
- STM32学习笔记之USB工程目录文件分析
- STM32学习笔记之USB虚拟串口描述符简介
- STM32学习笔记之以太网的通信+lwip协议移植
- STM32学习笔记:FSMC详述
- STM32学习之:读取芯片的唯一标识ID
- STM32学习之:stm32中C语言的数据类型
- STM32学习之:定时器时间计算
- STM32学习之:定时器简介
- STM32学习之:Context—M3简介
最新视频课程更多

![]() SimpleLink CC26x2CC13x2 可支持多重协议的无线微控制器
SimpleLink CC26x2CC13x2 可支持多重协议的无线微控制器

![]() SimpleLink 系列产品的安全性介绍
SimpleLink 系列产品的安全性介绍

![]() 基于 TI MSP430 Scan Interface 技术的流量表解决方案
基于 TI MSP430 Scan Interface 技术的流量表解决方案

![]() 2018 TI SimpleLink™ MCU 平台研讨会 - 回看
2018 TI SimpleLink™ MCU 平台研讨会 - 回看
![]() Simplelink 无线连接平台介绍
Simplelink 无线连接平台介绍
何立民专栏
单片机及嵌入式宝典
 北京航空航天大学教授,20余年来致力于单片机与嵌入式系统推广工作。
北京航空航天大学教授,20余年来致力于单片机与嵌入式系统推广工作。
- 《单片机与嵌入式系统应用》历年文章目录
- 物联网时代的嵌入式系统机遇
- 从嵌入式系统视角看物联网
更多相关热搜器件
- 37221
- MSP430FR6977IPZR
- MC7809CD2TR4G
- MC8641DHX1250HC
- TLV71718PDQNT
- LFXTAL035358Reel
- KMPC8347ZUAGDB
- ASTMUPLPFL-125000MHZ-LJ-E
- ECS-135.6-8-30B-CKM
- EMRA21V2H-100000M-TR
更多每日新闻
- 抢占CIS市场,索尼三星再发力
- 在摩尔定律的催化下,晶圆代工厂版图恐将越来越小
- Drive AGX Xavier成为Optimus Ride无人驾驶首选平台
- 小度语音车载与Apollo智能汽车战略形成互补
- 亚马逊云服务器将为客户提供AMD霄龙处理器芯片
- 哑巴吃黄连,高通必须将部分技术许可提供给英特尔
- 5G基站数将猛增,对光网络将提出更高需求
- 5G时代群雄逐鹿,苹果、华为、小米、OPPO锁定新战场
- 挖掘比特币所需的能量是挖黄金的三倍
- iPhone销量不佳,恐跌破万亿市值

About Us 关于我们 客户服务 联系方式 器件索引 网站地图 最新更新 手机版
站点相关: 综合资讯 51单片机 PIC单片机 AVR单片机 ARM单片机 嵌入式系统 汽车电子 消费电子 数据处理 视频教程 电子百科 其他技术STM32 MSP430 C2000 单片机论坛 单片机资源下载 单片机习题与教程


 北京市海淀区知春路23号集成电路设计园量子银座1305 电话:(010)82350740 邮编:100191
北京市海淀区知春路23号集成电路设计园量子银座1305 电话:(010)82350740 邮编:100191
电子工程世界版权所有 京ICP证060456号 京ICP备10001474号 电信业务审批[2006]字第258号函 京公海网安备110108001534 Copyright © 2005-2018 EEWORLD.com.cn, Inc. All rights reserved