STM32之PWM的使用
1. 时钟的配置
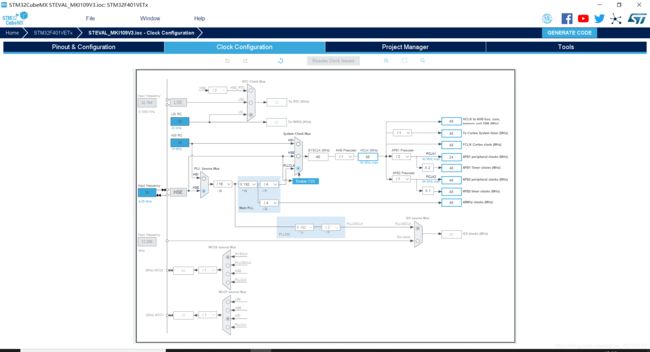
在时钟树上面,PWM对应的外设时钟为APB1 Timer Clock, 48MHz.
2. PWM通道的配置
选择内部时钟,也就是说基准频率为48MHz,通道使能CH1、CH2、CH3,其余不变。

Period=2400,也就是说PWM的频率为48000KHz/2400=20KHz
Pulse设置为1200表示高电平占用的时间
Fast Mode勾选,快速输出管脚电平,其余不变。

GPIO速度也选为最快速,慢速的话,在输出最小或者最大PWM的时候,响应会跟不上。

3. 代码生成
使用STM32Cube自动生成的代码,并且在初始化的地方,使能PWM通道:
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3);
如果需要更改PWM的占空比,直接修改寄存器,不要使用Cube提供的函数,否则PWM会有一个启停,这个在公司的项目中,就因为使用了Cube的函数,导致PWM频率中断,屏幕闪烁。
TIM3->CCR1 = pwm_pulse[1];
TIM3->CCR2 = pwm_pulse[2];
TIM3->CCR3 = pwm_pulse[3];
4. 测试代码
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t a[8] = {
0,1,2,3,4,5,6,7},i;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC1_Init();
MX_I2C1_Init();
MX_TIM3_Init();
MX_SPI4_Init();
MX_USART2_UART_Init();
MX_USB_DEVICE_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
TIM3->CCR1 = pwm_pulse[1];
TIM3->CCR2 = pwm_pulse[2];
TIM3->CCR3 = pwm_pulse[3];
for(i=0;i<8;i++)
a[i]++;
HAL_UART_Transmit(&huart2, a, 8, 100);
HAL_Delay(1000);
}
/* USER CODE END 3 */
}
5. 实验结果
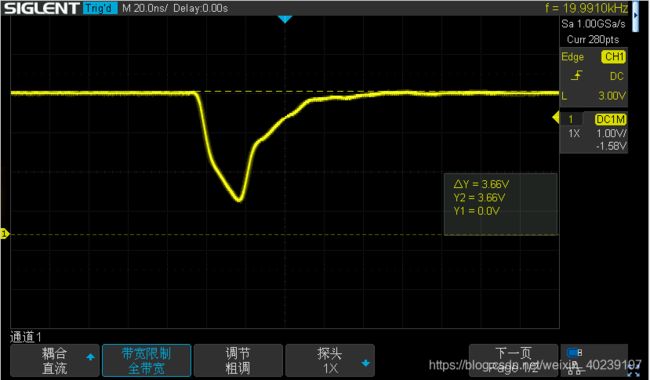
CCR3设置为1800的时候(总共2400),示波器截屏如下,占空比74.97%,接近设置值。

6. 疑问
Pulse=2400(总2400)的时候,如下图,PWM还有输出波形,为什么?理论上,不应该是100%输出高电平吗?速度太快GPIO完成不了一轮上升和下降,波形不能到0V。