使用cuda C完成矩阵相乘算法详解
写在前面:
- 本笔记为 NVIDIA CUDA初级教程视频的笔记
- 视频连接:https://www.bilibili.com/video/BV1kx411m7Fk?p=10
- P9和P10讲解了矩阵相乘的cuda 实现
文章目录
- 使用cuda C完成矩阵相乘算法详解
-
- Matirx Multiply:CPU实现
- Matirx Multiply:GPU实现
-
- 第1步:在算法框架中添加 CUDA memory transfers
- 第2步:CUDA C编程实现kernel
- 第3步 CUDA C编程调用kernel
- 源代码
- 优化矩阵相乘(一) —— 去除长度限制
- 优化矩阵相乘(二) —— 使用共享内存
- 优化的矩阵乘法源代码
使用cuda C完成矩阵相乘算法详解
矩阵相乘大家应该都不陌生。
设有两个矩阵M和N,假设M和N都是方阵,维度均为width × width

如果M和N均为1000 × 1000的矩阵,总共要进行1000000次点乘。其中,每次点乘有1000次乘法和1000次加法。
Matirx Multiply:CPU实现
先来看看使用普通的c代码在CPU端如何实现
void MatrixMulOnHost(float* M,float* N,float* P,int width)
{
for(int i=0;i<width;++i)
for(int j=0;i<width;j++)
{
//sum对应每一次点乘(M的某一行×N的某一列)的结果
float sum = 0;
for(int k=0;k<width;k++)
{
float a = M[i*width+k];
float b = N[k*width+j];
sum+=a*b;
}
P[i*width+j]=sum;//乘累加的结果放到对应位置上
}
}
可以看到循环计算结果P矩阵里的每一个元素。计算过程非常清晰。
从这里可以看到,这个计算存在非常大的并行性,即结果矩阵P里的每一个元素结果的计算与P中其他元素是不相关的,没有依赖性。
所以我们可以在GPU端上实现矩阵相乘。
Matirx Multiply:GPU实现

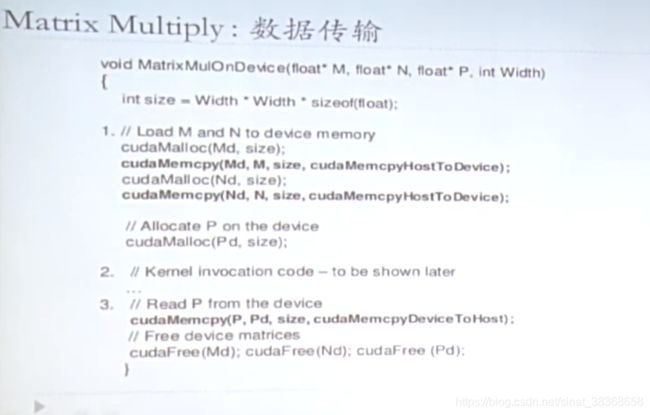
可以看到总共有3步:
- 管理内存(在GPU上分配空间,将CPU端数据拷贝到GPU端)
- GPU上并行处理(启动kernel函数)
- 将结果拷贝回到CPU端
第1步:在算法框架中添加 CUDA memory transfers
第2步:CUDA C编程实现kernel
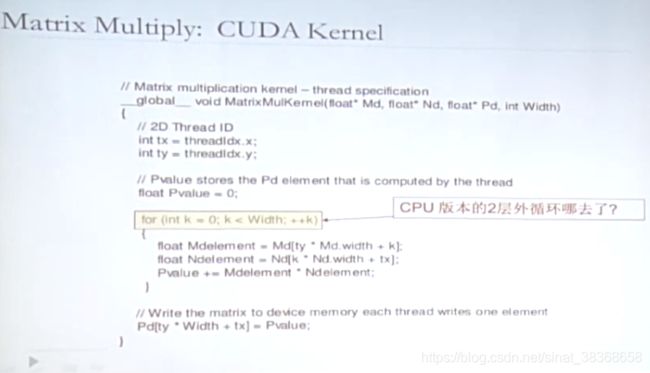
可以看到这里有2个问题
- 使用线程的索引代替了双重循环,并行去做就可以
- 不需要锁或同步,如果数据之间有依赖,存在同步问题,但这里每一个结果矩阵的元素是独立的,与别的元素无关,所以不需要锁存。
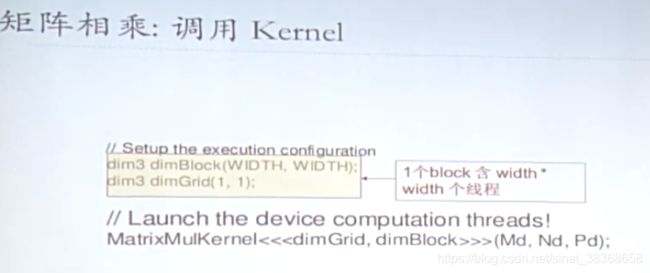
第3步 CUDA C编程调用kernel
源代码
#include 回顾一下并行实现这个样例的原理:

在这个矩阵相乘的案例中:
- 在算法实现中最主要的性能问题是什么?
- 矩阵长度限制
- 仅有一个block
- 以G80和GT200为例 —— 最多512个线程/block
- 矩阵长度限制
- 主要的限制是什么?
- 很多global memory读写访问(读Md,Nd,两次读后才写一次,这两次读耗时巨大,开销较大)
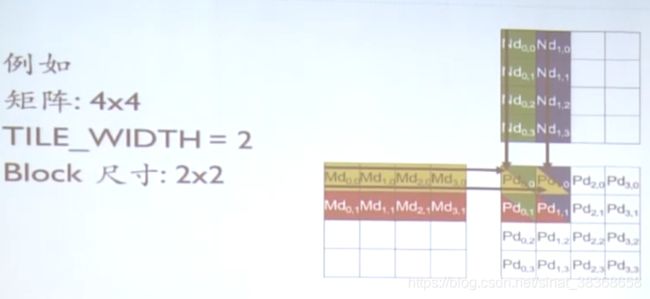
优化矩阵相乘(一) —— 去除长度限制
解决第一个问题:去除长度限制
- 将Pd矩阵拆成tile小块
- 把一个tile布置到一个block
- 通过threadIdx和blockIdx索引

由于计算结果依然是彼此独立的,所以每个block可以自己做自己的事情。
优化后的kernel函数如下:
(注意:每个线程计算的是块内子矩阵的一个元素)
__global__ void MatrixMulKernel_01(float* Md, float* Nd, float* Pd, int width)
{
//计算矩阵Pd和M的行索引
int Row = blockIdx.y*blockDim.y + threadIdx.y;
//计算矩阵Pd和N的列索引
int Col = blockIdx.x*blockDim.x + threadIdx.x;
float Pvalue = 0;
//每个线程计算块内子矩阵的一个元素
for (int k = 0; k<width; k++)
{
float Mdelement = Md[Row*width + k];
float Ndelement = Nd[k*width + Col];
Pvalue += Mdelement * Ndelement;
}
Pd[Row*width + Col] = Pvalue;
}
这种方式可以适用于大规模的问题
调用kernel代码如下:
dim3 dimGrid(Width / TILE_WIDTH, Height / TILE_WIDTH);
dim3 dimBlock(TILE_WIDTH, TILE_WIDTH);
MatrixMulKernel_01 <<<dimGrid, dimBlock >> >(Md, Nd, Pd, TILE_WIDTH);
注:如果输入的数组不是TILE_WIDTH的整数倍怎么办?扩充元素到分块的整数倍后将元素填0
优化矩阵相乘(二) —— 使用共享内存
上述代码访存受限与global memory带宽
- G80 峰值GFLOPS:346.4
- 需要1386 GB/s(每个浮点数4个bit,346*4)的带宽未达到
- G80 存储器实际带宽:86.4GB/s
- 限制代码 21.6 GFLOPS
- 实际上,代码运行速度是15 GLOPS
- 必须大幅减少对global memory的访问
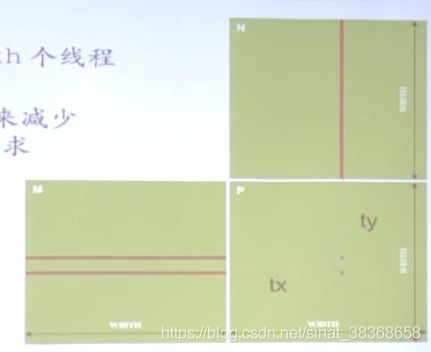
回顾之前的程序,实际上,每个输入元素被Width个线程读取(对于每一列都读取了Width次),所以使用shared memory来减少global memory带宽需求。
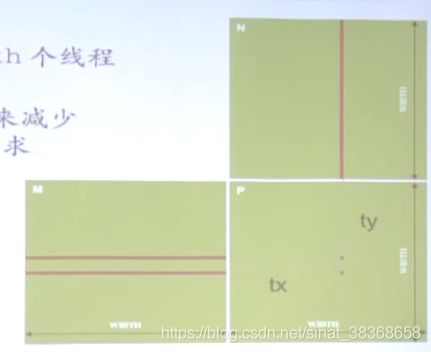
把kernel拆分成多个阶段
- 每个阶段用Md和Nd的子集累加Pd
- 每个阶段有很好的数据局部性
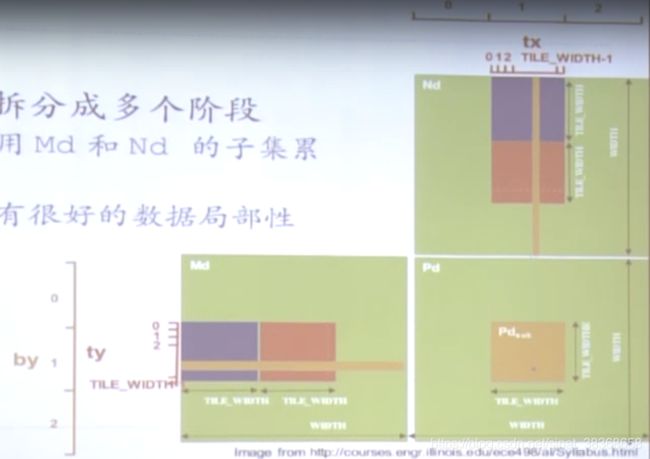
每个线程
- 读入瓦片内Md和Nd的一个元素存入shared memory
代码如下:
__global__ void MatrixMulKernel_01(float* Md, float* Nd, float* Pd, int width)
{
//块内定义shared memory存储Md和Nd的子集
__shared__ float Mds[TILE_WIDTH][TILE_WIDTH];
__shared__ float Nds[TILE_WIDTH][TILE_WIDTH];
int bx = blockIdx.x; int by = blockIdx.y;
int tx = threadIdx.x; int ty = threadIdx.y;
int Row = by*TILE_WIDTH + ty;
int Col = bx*TILE_WIDTH + tx;
float Pvalue = 0;
//注:多个块的计算的结果相加后才得到pd对应元素的值
//width/TILE_WIDTH:阶段数目
//m:当前阶段的索引
for (int m = 0; m<width/TILE_WIDTH; m++)
{
//从Md和Nd各取一个元素存入shared memory
Mds[ty][tx] = Md[Row*width + (m*TILE_WIDTH + tx)];
Nds[ty][tx] = Nd[Col + (m*TILE_WIDTH + ty)*width];
//等待block内所有线程,即等到整个瓦片存入shared memory
__syncthreads();
//累加点乘的子集
for (int k = 0; k < TILE_WIDTH; k++)
Pvalue += Mds[ty][k] * Nds[k][tx];
//注:如果没有同步,可以上一次的乘累加没完成,下一次的数已经过来把乘累加结果冲掉了
__synthreads();
}
//把最终结果写入global memory
Pd[Row*width + Col] = Pvalue;
}
如何选取TITLE_WIDTH的数值?
-
如果太大的话会怎样?
- 超出一个块允许的最大线程数
Fermi — 1024;Kerpler - 1024;具体根据不同的计算能力查表得到。
- 超出shared memory极限
以G80为例:16KM/SM 并且 B blocks/SM;
2KB/block
1KB给Nds,1KB给Mds(16 * 16 *4)
TITLE_WIDTH = 16
更大的TITLE_WIDTH将导致更少的块数
Shared memory瓦片化的好处
- global memory 访问次数减少TILE_WIDTH倍
- 16*16瓦片 减少16倍
- 以G80为例
- 现在global memory 支持345.6 GFLOPS
- 接近峰值 346.5 GFLOPS
G80线程尺寸的考虑
- 每个thread block有许多个线程
- TILE_WIDTH为16时:16*16=256个线程
- 需要许多个thread blocks
- 一个1024*1024 Pd 需要:64 * 64 = 4K thread blocks
- 每个thread block执行 2*256 =512次global memory的float读入,为了供应256 *(2 *16)= 8K mul/add操作
- 存储带宽不再是限制因素
Atomic Functions 原子操作
- 许多原子操作
//算数运算
atomicAdd();
atomicSub();
atomicExch();
atomicMin();
atomicMax();
atomicDec();
atomicCAS();
//位运算
atomicAnd();
atomicOr();
atomicXor();
- 不同块里面的线程如何协作?
- CUDA中的线程协作主要是通过共享内存实现的。使用关键字**“share”**声明共享变量
- 共享内存是用于同一个线程块内的线程之间交流的,不同线程块之间是无法通过共享内存进行交流的
- 还有更多内容待补充。
- 尽量少用原子操作,为什么?
- 原子操作比较耗时,需要在整个系统里进行排队
优化的矩阵乘法源代码
#include