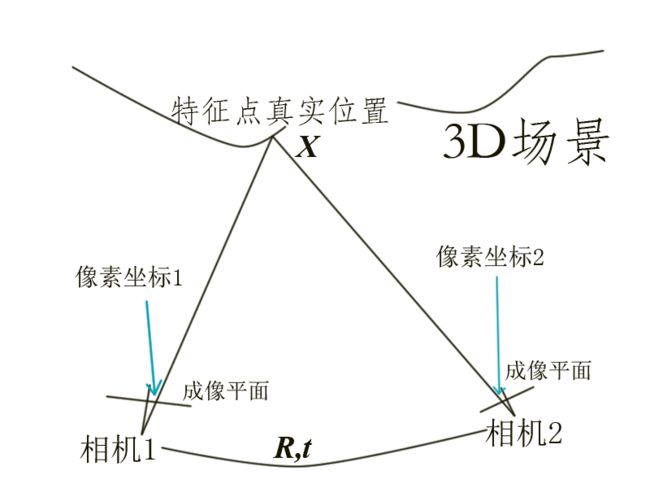

总之,假设相机1的位姿为单位矩阵,对于任意一个特征点,它在三维空间的真实坐标位于 Xj,而在两个相机坐标系上看来是 zj1,zj2。根据投影关系,我们有:

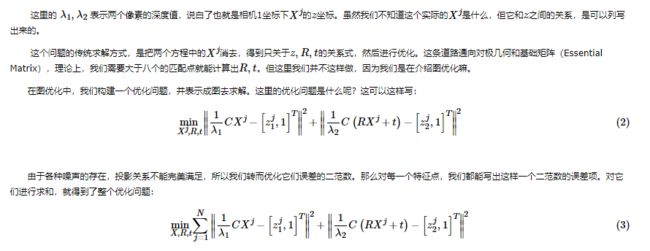
它叫做最小化重投影误差问题(Minimization of Reprojection error)。当然,它很遗憾地,是个非线性,非凸的优化问题,这意味着我们不一定能求解它,也不一定能找到全局最优的解。在实际操作中,我们实际上是在调整每个Xj,使得它们更符合每一次观测zj,也就是使每个误差项都尽量的小。由于这个原因,它也叫做捆集调整(Bundle Adjustment)。
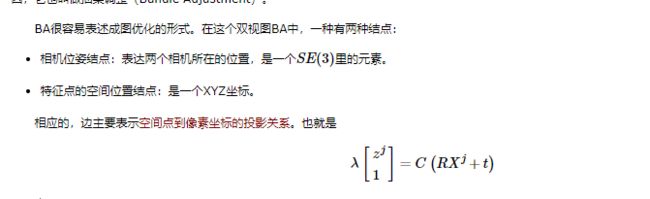
注意这个边,实际上不是那么直观的“边”也即从相机位姿到特征点位置的连线,而是空间点Xj到其在相机上的像素坐标的投影关系
也就是说 边是重投影误差
下面我们来用g2o实现一下BA。选取的结点和边如下:
结点1:相机位姿结点:g2o::VertexSE3Expmap,来自
结点2:特征点空间坐标结点:g2o::VertexSBAPointXYZ,来自
边:重投影误差:g2o::EdgeProjectXYZ2UV

而误差计算是什么意思呢:
从简单的入手:(这个边是edgesim3ProjectXYZonlePose)
这里v1为相机位姿(se3)
v1.estimate.map(Xw) 中:Xw为特征点在世界坐标系中的位置(3d)
从而这个的计算结果可以视为xyz_trans,其为特征点在相机坐标系中的位置(3d)
对这个结果xyz_trans进行cam_project,也就是得到特征点在相机坐标系中的坐标(2d) 也即u,v
其和观测值obs相减,即为误差项。
而到这里:
v1为相机1位姿(se3),v2为特征点位置(pointXYZ)(两个节点不是同一种节点)
所以 v1.estimete.map(v2.estimate),计算得到的是特征点在相机1坐标中的位置(3d)
对这个结果进行cam.cam_map,计算得到的是特征点在相机坐标系中的坐标(2d)也即u,v
这个值和观测值obs相减,得到误差项
总结,边实际上就是提供了一种误差项的计算方式,以及一种使用节点数据的方式
对于我定义的节点类型,以及我定义的误差项计算方式,找到这样的边的类型,或者自己自定义一个
在使用的时候,把边和节点连接起来,然后给边一个观测值,这个值就是用来计算误差项之中的obs
从而优化就是不断调整节点的值,使得误差项的和最小
特别篇:
刚才的节点实际上都是相机的位姿,或者说单帧位姿,但实际上,节点也可以是相对位姿,如下:
闭环检测时两帧之间相对位姿计算:OptimizeSim3
a. 参数列表
OptimizeSim3(
KeyFrame *pKF1, //匹配的两帧中的一帧
KeyFrame *pKF2, //匹配的两帧中的另一帧
vector
&vpMatches1, //共视的地图点 g2o::Sim3 &g2oS12, //两个关键帧间的Sim3变换
const float th2, //核函数阈值
const bool bFixScale)//单目进行尺度优化,双目不进行尺度优化
b. 图的结构
Vertex:
- g2o::VertexSim3Expmap(),两个关键帧的位姿
- g2o::VertexSBAPointXYZ(),两个关键帧共有的地图点
Edge:
- g2o::EdgeSim3ProjectXYZ(),BaseBinaryEdge
+ Vertex:关键帧的Sim3,MapPoint的Pw
+ measurement:MapPoint在关键帧中的二维位置(u,v)
+ InfoMatrix: invSigma2(与特征点所在的尺度有关)
- g2o::EdgeInverseSim3ProjectXYZ(),BaseBinaryEdge
+ Vertex:关键帧的Sim3,MapPoint的Pw
+ measurement:MapPoint在关键帧中的二维位置(u,v)
+ InfoMatrix: invSigma2(与特征点所在的尺度有关)
c. 具体流程
1) 把输入的KF1到KF2的位姿变换SIM3加入图中作为节点0.
2) 找到KF1中对应的所有map点, 放在vpMapPoints1中. vpMatches1为输入的匹配地图点, 是在KF2中匹配上map点的对应集合.
3) Point1是KF1的Rotation matrix*map point1的世界坐标+KF1的Translation matrix.(也即,Point1是map point 1在关键帧1的相机坐标系下的坐标(3D))
Point2是KF2的Rotation matrix*map point2的世界坐标+KF2的Translation matrix. (也即,Point2是map point 2在关键帧2的相机坐标系下的坐标(3D))
把Point1 Point2作为节点加入图中。
4) 在节点0与Point1, Point2之间都建立边连接. 测量值分别是地图点反投影在图像上的二维坐标, 信息矩阵为反投影的误差.
从而,边有两类,一类是KF2对应的特征点到KF1的投影,一类是KF1对应的特征点到KF2的投影
5) 图构建完成, 进行优化!
6) 更新两帧间转换的Sim3.
具体:添加Sim3顶点(两个关键帧的位姿变换)
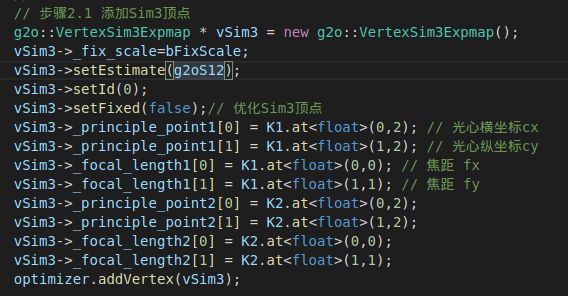
添加特征点顶点

循环 对当前循环,pmp1为关键帧1中特征点,pmp2为关键帧2中特征点,每次循环添加两个顶点
一个顶点是pmp1在相机1坐标系下的坐标,一个顶点是pmp2在相机2坐标系下的坐标
添加边:
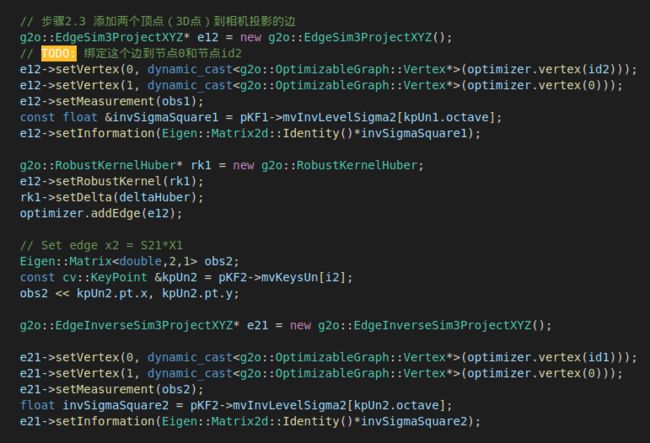
这个边的误差是
也就是说 现在,对每对匹配,有三个节点,一个节点是两帧的相对位姿变换,两个节点是特征点在相机坐标系下的位置
有两条边,第一条边连接相对位姿变换和节点2
这里比较难理解的是,v2是特征点的世界坐标,v1是相对位姿变换(而不是之前的v1是当前帧相机位姿)
那
意味着什么呢,如果v1是当前帧相机坐标的时候,这意味着计算特征点在相机坐标系下的位置
现在就意味着,计算特征点在相对位姿变换下的位置?这怎么理解
而且,测量值的确是特征点在图像上的坐标(u,v),那这就肯定要指定是在图像1,还是图像2上的坐标
总不可能是在“图像的相对变换”上的坐标吧
比如
这里的obs1,阅读代码后发现确实是特征点在图像1上的坐标
而且,这里的目的很显然是要算对称重投影误差
只是不明白的是,在节点是表示相对位姿变换的情况下,怎么投影到其中一帧上