halcon 基于形状模板匹配的定位与测定
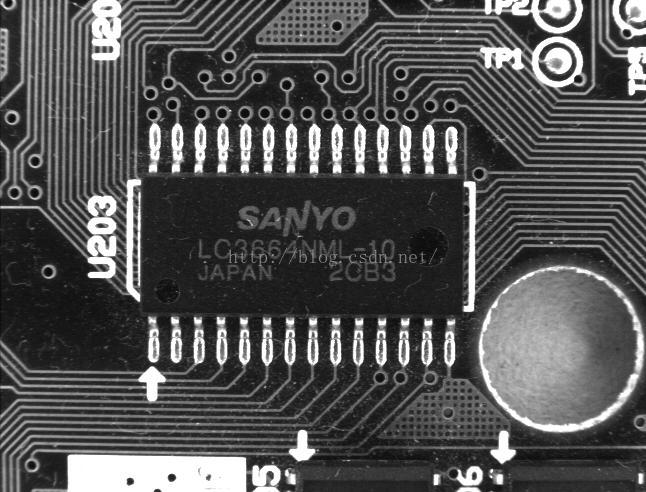
模板生成图像
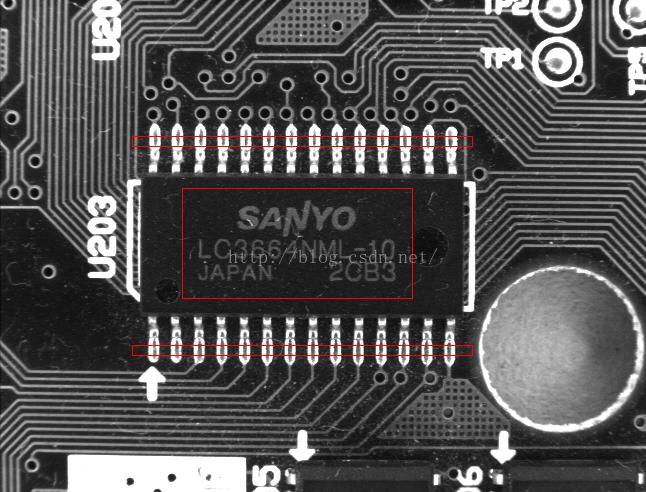
划定模板区域以及测量框区域
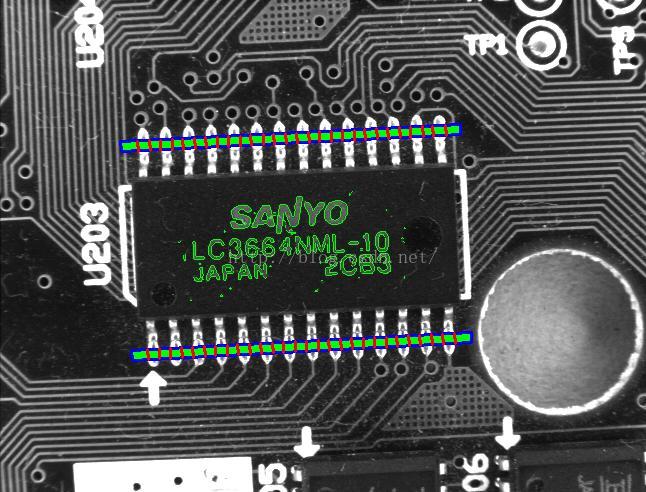
基于模板匹配定位对象,利用仿射变换对于测量框进行平移,实现对于目标区域的测量
***这个例子显示如何使用形状匹配来定位对象,并利用获取检测对象的位置和角度搜索待检测区域。
****这个例子利用IC上字符定位IC.基于检测对象的角度和位置(位姿)构造两个测量矩形,进而测定Ic针脚之间的距离,
****此外这个打光效果使得针脚的灰度值饱和为225,这使得针脚的表面宽度偏大从而缩小了针尖之间的距离。虽然所有的
***的图像采用同一个样品。
dev_update_pc ('off')
dev_update_window ('off')
dev_update_var ('off')
open_framegrabber ('File', 1, 1, 0, 0, 0, 0, 'default', -1, 'default', -1, 'default', 'board/board.seq', 'default', -1, 1, FGHandle)
grab_image (Image, FGHandle)
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
dev_open_window (Height+70, 0, Width, 120, 'black', WindowHandleText)
dev_set_window (WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
set_display_font (WindowHandleText, 16, 'mono', 'true', 'false')
dev_set_color ('red')
dev_display (Image)
***设置roi区域的大小,方便修改
Row1 := 188
Column1 := 182
Row2 := 298
Column2 := 412
gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
area_center (Rectangle, Area, Row, Column)
Rect1Row := -102
Rect1Col := 5
Rect2Row := 107
Rect2Col := 5
RectPhi := 0
RectLength1 := 170
RectLength2 := 5
****注意此处的测量矩形中心坐标是参照模板区域表示的,以便于下一步对其进行变换gen_rectangle2 (Rectangle1, Row+Rect1Row, Column+Rect1Col, RectPhi, RectLength1, RectLength2)
gen_rectangle2 (Rectangle2, Row+Rect2Row, Column+Rect2Col, RectPhi, RectLength1, RectLength2)
reduce_domain (Image, Rectangle, ImageReduced)
***参数含义依次为 选取的模板图像、金字塔的水平、最小旋转角度、匹配对象的旋转角度范围、角度步长、模型产生的方式、匹配标准、
***模板的中对象与背景阈值对比以及模板的尺寸、在图像的中的最小对比度。
create_shape_model (ImageReduced, 4, 0, rad(360), rad(1), 'none', 'use_polarity', 30, 10, ModelID)
get_shape_model_contours (ShapeModel, ModelID, 1)
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, Row, Column, HomMat2DTranslate)
affine_trans_contour_xld (ShapeModel, ShapeModelTrans, HomMat2DTranslate)
dev_display (Image)
dev_set_color ('green')
dev_display (ShapeModelTrans)
dev_set_color ('blue')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Rectangle1)
dev_display (Rectangle2)
dev_set_draw ('fill')
dev_set_line_width (1)
dev_set_color ('yellow')
disp_message (WindowHandle, ['Press left button to start','and stop the demo'], 'image', 12, 12, 'black', 'true')
get_mbutton (WindowHandle, Row3, Column3, Button1)
wait_seconds (0.5)
Button := 0
while (Button # 1)
dev_set_window (WindowHandle)
dev_set_part (0, 0, Height-1, Width-1)
grab_image (ImageCheck, FGHandle)
dev_display (ImageCheck)
***count_second***计算从开始S1到S2中算子所用时间
count_seconds (S1)
***模板搜索***
find_shape_model (ImageCheck, ModelID, 0, rad(360), 0.7, 1, 0.5, 'least_squares', 4, 0.7, RowCheck, ColumnCheck, AngleCheck, Score)
count_seconds (S2)
dev_display (ImageCheck)
***显示找到的模板图像
if (|Score| > 0)
dev_set_color ('green')
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, RowCheck, ColumnCheck, HomMat2DTranslate)
hom_mat2d_rotate (HomMat2DTranslate, AngleCheck, RowCheck, ColumnCheck, HomMat2DRotate)
affine_trans_contour_xld (ShapeModel, ShapeModelTrans, HomMat2DRotate)
dev_display (ShapeModelTrans)
******利用仿射变换对于划定ROI区域做位置变换*****
affine_trans_pixel (HomMat2DRotate, Rect1Row, Rect1Col, Rect1RowCheck, Rect1ColCheck)
affine_trans_pixel (HomMat2DRotate, Rect2Row, Rect2Col, Rect2RowCheck, Rect2ColCheck)
gen_rectangle2 (Rectangle1Check, Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2)
gen_rectangle2 (Rectangle2Check, Rect2RowCheck, Rect2ColCheck, AngleCheck, RectLength1, RectLength2)
dev_set_color ('blue')
dev_set_draw ('margin')
dev_set_line_width (3)
dev_display (Rectangle1Check)
dev_display (Rectangle2Check)
dev_set_draw ('fill')
count_seconds (S3)
gen_measure_rectangle2 (Rect1RowCheck, Rect1ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle1)
gen_measure_rectangle2 (Rect2RowCheck, Rect2ColCheck, AngleCheck, RectLength1, RectLength2, Width, Height, 'bilinear', MeasureHandle2)
measure_pairs (ImageCheck, MeasureHandle1, 2, 90, 'positive', 'all', RowEdgeFirst1, ColumnEdgeFirst1, AmplitudeFirst1, RowEdgeSecond1, ColumnEdgeSecond1, AmplitudeSecond1, IntraDistance1, InterDistance1)
measure_pairs (ImageCheck, MeasureHandle2, 2, 90, 'positive', 'all', RowEdgeFirst2, ColumnEdgeFirst2, AmplitudeFirst2, RowEdgeSecond2, ColumnEdgeSecond2, AmplitudeSecond2, IntraDistance2, InterDistance2)
close_measure (MeasureHandle1)
close_measure (MeasureHandle2)
count_seconds (S4)
dev_set_color ('red')
*****显示检测边缘
disp_line (WindowHandle, RowEdgeFirst1-RectLength2*cos(AngleCheck), ColumnEdgeFirst1-RectLength2*sin(AngleCheck), RowEdgeFirst1+RectLength2*cos(AngleCheck), ColumnEdgeFirst1+RectLength2*sin(AngleCheck))
disp_line (WindowHandle, RowEdgeSecond1-RectLength2*cos(AngleCheck), ColumnEdgeSecond1-RectLength2*sin(AngleCheck), RowEdgeSecond1+RectLength2*cos(AngleCheck), ColumnEdgeSecond1+RectLength2*sin(AngleCheck))
disp_line (WindowHandle, RowEdgeFirst2-RectLength2*cos(AngleCheck), ColumnEdgeFirst2-RectLength2*sin(AngleCheck), RowEdgeFirst2+RectLength2*cos(AngleCheck), ColumnEdgeFirst2+RectLength2*sin(AngleCheck))
disp_line (WindowHandle, RowEdgeSecond2-RectLength2*cos(AngleCheck), ColumnEdgeSecond2-RectLength2*sin(AngleCheck), RowEdgeSecond2+RectLength2*cos(AngleCheck), ColumnEdgeSecond2+RectLength2*sin(AngleCheck))
dev_set_line_width (1)
NumLeads := |IntraDistance1|+|IntraDistance2|
MinDistance := min([InterDistance1,InterDistance2])
dev_set_window (WindowHandleText)
dev_set_part (0, 0, 119, Width-1)
dev_clear_window ()
disp_message (WindowHandleText, 'Matching: Time: '+((S2-S1)*1000)$'5.2f'+'ms , Score: '+Score$'7.5f', 'image', 20, 20, 'green', 'false')
disp_message (WindowHandleText, 'Measure: Time: '+((S4-S3)*1000)$'5.2f'+' ms, Num. leads: '+(NumLeads)$'2d', 'image', 50, 20, 'red', 'false')
disp_message (WindowHandleText, ' Min. lead dist: '+MinDistance$'6.3f', 'image', 80, 20, 'red', 'false')
endif
dev_error_var (Error, 1)
dev_set_check ('~give_error')
get_mposition (WindowHandle, R, C, Button)
dev_error_var (Error, 0)
dev_set_check ('give_error')
if (Error#H_MSG_TRUE)
Button := 0
endif
endwhile
dev_set_window (WindowHandleText)
dev_close_window ()
clear_shape_model (ModelID)
close_framegrabber (FGHandle)