OpenCV: 读取图片中某个点的像素值
读取图片中某个点的像素值
RGB图 → \rightarrow → 降噪 → \rightarrow → Gray图 → \rightarrow → 两次降采样 → \rightarrow → 边缘检测图
此例子中未降噪

注意:
此图来源

创建时先列后行
//确定某个像素点
cv::Vec3b intensity=img_rgb.at<cv::Vec3b>(x,y); //列,行
访问时先行后列
//访问某个像素点
(uint)img_gry.at<uchar>(y,x) //行,列
main.cpp
#include 未对下图中的值进行强制类型转换,导致出现终端显示乱码
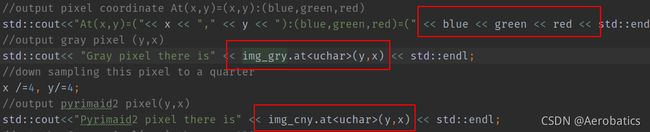

对上面的问题进行处理 (强制类型转换)

像素点(16,32)的读取结果(136,122,104)
灰度图中像素点(16,32)的值为118
两次降采样后像素点(4,8)的值为0(黑色)

灰度图
修改像素点(4,8)的值变为255 (白色)
img_cny.at<uchar>(x,y)=255;
两次降采样后的边缘检测图
