Linux 设备驱动开发(三)---基于驱动的超声波距离检测
超声波模块
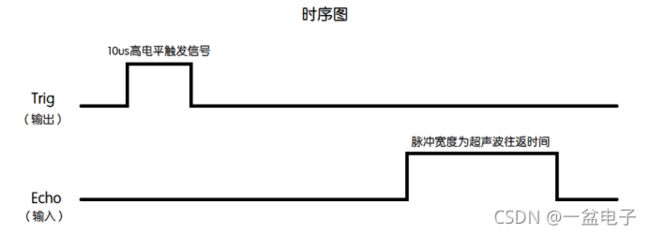
超声波是 4Pin(VCC, Trig, Echo, GND),工作时需要 Trig 发送触发信号,发送超声波信号,回波检测引脚 Echo 接收超声波返回信号。
工作过程:
1、Trig 设置成输出模式,给至少 10us 的高电平信号。
2、Echo设置成输入模式,等待有信号返回,当检测到一个高电平,高电平持续的时间就是超声波从发射到返回的时间,测试距离=(高电平时间*声速(340m/s))/2。
基于wiringPi库的超声波检测程序
#include "wiringPi.h"
#include 既然学了设备驱动,就任性一回,不用wiringPi库的函数,自己写驱动控制I/O口。
上一节只对pin4设置输出模式,控制输出高/低电平。这节对代码进行修改,pin17为发射引脚Trig,设置为输出模式。pin27为接收引脚Echo,设置为输入模式。pin4接蜂鸣器模块的信号线,设置为输出模式。
一、知识补充
1、寄存器
GPLEVn (物理地址:0x3F200034) 检测I/O口:高/低电平

2、内核函数
copy_to_user函数
unsigned long copy_to_user(void *to, const void *from, unsigned long n)
to:用户空间指针
from:内核空间的指针
n:将要拷贝数据的字节数
返回:成功返回0,失败返回没有拷贝成功的数据字节数。
二、驱动代码
1、pin27–> Echo引脚
//文件pin27driver.c
#include 2、pin17–> Trig引脚
//文件pin17driver.c
#include3、pin4->蜂鸣器Bee引脚
//文件pin4driver.c
#include 三、应用层测试代码
方法一
//文件ultra.c
#include 方法二
//文件ultra.c
#include 方法一与方法二的区别在于:方法一中pin17直接通过内核驱动输出10us的脉冲,而方法二中的pin17通过内核驱动先被拉高10us后被拉低。