opencv-python 详解霍夫线变换
目录
应用场景:
数学原理:
OpenCV霍夫直线检测基本流程
实验代码请看我的另一篇文章:
应用场景:
找出二值图中的直线以及测量直线的角度
数学原理:
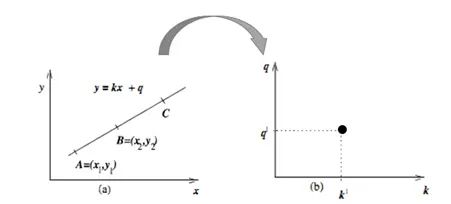
笛卡尔坐标系内,两个点可以确定一条线 y = k*x + q
霍夫空间变换是一种非常简单的变换,其实就是直线方程y=kx+q的另一种写法:
- 图像空间:y=kx+q (变量是y和x)
- 霍夫空间:q=-xk+y(变量是q和k)
变换后的空间成为霍夫空间。即:笛卡尔坐标系中一条直线,对应霍夫空间的一个点。
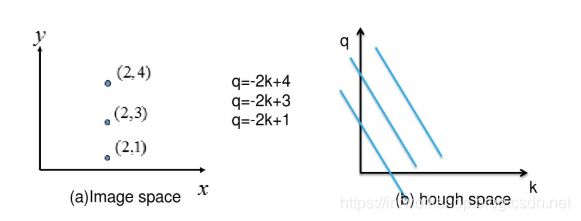
反过来同样成立(霍夫空间的一条直线,对应笛卡尔坐标系的一个点):

笛卡尔坐标系中两个点对应霍夫空间两条线

如果笛卡尔坐标系三个点共线,对应的霍夫空间的三条线相交于一点

霍夫变换的后处理的基本方式:选择由尽可能多直线汇成的点。
但是,按照直角坐标系表示的话会出现下图的情况:当图像空间中点共的线垂直于x轴时,斜率无限大,在霍夫空间无法找到交点。因而,人们最终引入了极坐标的表示法。
极坐标下的霍夫直线检测原理与直角坐标系下完全一致,唯一需要重新推导的是与霍夫空间的极坐标参数函数:
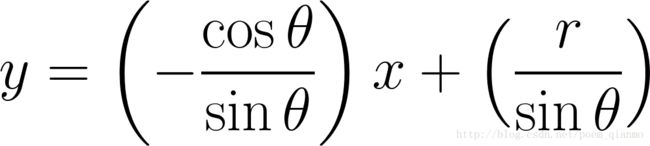
化简便可得到:

如果对于一个给定点 ,意味着每一对
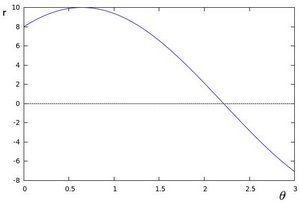
,意味着每一对 代表一条通过点的直线。我们在极坐标对极径极角平面绘出所有通过它的直线, 将得到一条正弦曲线. 例如, 对于给定点X_0= 8 和Y_0= 6 我们可以绘出下图 (在平面):
代表一条通过点的直线。我们在极坐标对极径极角平面绘出所有通过它的直线, 将得到一条正弦曲线. 例如, 对于给定点X_0= 8 和Y_0= 6 我们可以绘出下图 (在平面):
极坐标与笛卡尔坐标的转换公式,从极坐标转换 (r,θ) 在笛卡尔坐标系 (x,y) :
x = r × cos( θ )
y = r × sin( θ )从笛卡儿坐标转换 (x,y) 到极坐标 (r,θ):
r = √(x2+y2)
θ = tan-1 (y/x)这个值tan-1( y/x ) 可能需要进行调整:
象限I: 使用计算器值
象限II: Add 180°
象限III: Add 180°
象限 IV: Add 360°在极坐标系下,其实是一样的:极坐标的点→霍夫空间的直线,只不过霍夫空间不再是[k,q]的参数,而是
OpenCV霍夫直线检测基本流程
- 读取图像,边缘检测+灰度图转换
- 调用HoughLines()、HoughLinesP()
- 在图中依次绘制出每条线段
标准HoughLines()变换 和 概率霍夫线变换HoughLinesP():
cv2.HoughLines()
dst: 要检测的二值图(一般是阈值分割或边缘检测后的图)
rho : 参数极径 r 以像素值为单位的分辨率. 我们使用 1 像素,值越大,考虑越多的线
theta: 参数极角 \theta 以弧度为单位的分辨率. 我们使用 1度 (即CV_PI/180),值越小,考虑越多的线
threshold: 设置阈值: 一条直线所需最少的的曲线交点,值越小,考虑越多的线
cv2.HoughLinesP(dst, lines, 1, CV_PI/180, 50, 50, 10 )
dst: 要检测的二值图(一般是阈值分割或边缘检测后的图)
rho : 参数极径 r 以像素值为单位的分辨率. 我们使用 1 像素.
theta: 参数极角 \theta 以弧度为单位的分辨率. 我们使用 1度 (即CV_PI/180)
threshold: 设置阈值: 一条直线所需最少的的曲线交点。超过设定阈值才被检测出线段,值越大,基本上意味着检出的线段越长,检出的线段个数越少。
minLinLength: 能组成一条直线的最少点的数量. 点数量不足的直线将被抛弃.
maxLineGap: 能被认为在一条直线上的两点的最大距离。
return:返回的是含有一条直线的起始点和终点坐标[x1,y1,x2,y2] 标准霍夫变换,其本质上就是把图像中的边缘像素映射到它的霍夫空间,比如一共有M个边缘像素,则所有的边缘像素都需要进行映射,其运算量和所需内存都会很大。如果只处理图像的m(m https://blog.csdn.net/RayChiu757374816/article/details/119648808?spm=1001.2014.3001.5501实验代码请看我的另一篇文章: