自己动手做个DIY波士顿机器狗
我想来整个DIY波士顿机器狗。
中文的介绍:
https://www.qbitai.com/2020/08/17572.html
软件安装:
https://github.com/mike4192/spotMicro
硬件制作:
https://www.thingiverse.com/thing:3445283

中文介绍是这样的:
用树莓派DIY波士顿机器狗,帮你省下50万:教程开源,人人皆可上手
软件部分在运行Ubuntu 16.04的树莓派3B计算机上实现。
所以首先,需要准备一个价值人民币230元左右的树莓派3B开发板。
控制部分的组件,包括价格不到30元,接口为I2C的伺服驱动PCA9685。
以及12个伺服电机PDI-HV5523MG,单个价格约为70+元。
另外,还需要配备一块16×2,I2C接口的液晶显示器。
电池方面,采用的是2s 4000mAh的锂电池,直接连接电源伺服,价格在160元左右。
稳压器用到的是HKU5 5V/5A UBEC,为树莓派、液晶面板、PCA9695控制板供电,价格折合人民币约为45元。
整个一套下来,算上3D打印机,成本不超过4000元
https://www.thingiverse.com/thing:3445283 介绍硬件制作
部件很多都是3D打印加工的,有stl 和图片下载包,我没找到清单,下载里有不同版本的。
硬件组装有youtube 视频,我看了一遍。
Assembly video part 1 :https://youtu.be/03RR-mz2hwA
Assembly video part 2 :https://youtu.be/LV5vvmhwtxM
Instagram :https://www.instagram.com/kim.d.yeon/
Electronics
12 × MG 996 R servo motor
1 × Arduino Mega
2 × HC-SR04 Ultrasonic sensor
1 × HC-06 Bluetooth module
1 × MPU-6050 Gyro sensor
1 × I2C 16x2 LCD Module
1 × Rleil rocker switch RL3-4
7.4v Battery
Screws, Nuts and Bearings
8 × 'M5×15'
40 × 'M4×20'
8 × 'M4×15'
48 × 'M4 nut'
4 × 'M3×20'
28 × 'M3×10'
16 × 'M3 nut'
8 × 'F625zz Flange ball bearing'
下载文件中stl 文件的目录如下:
https://www.thingiverse.com/thing:3445283 页面里有下载的链接,就是DownloadAllFiles 下载,我也给一个我的链接,下载链接是:http://www.liwensoft.com/downloads/robotdog.zip
下载的文件不是都要打印。注意伺服电机有2种,主板也有2种。根据你主板和伺服电机的选择而选择需要打印的文件。下面是我的一个说明:
_cls 采用 cls6336hv 伺服电机
_mg 采用 mg995 或 mg996r 伺服电机
non-mega 指树莓派主板的不同,可能是 arduino mega vs uno
比如你采用mega 主板,那些标记non-mega 就不要打印, 相反你采用的 不是Mega (应该指uno),你就应该打印有non-mega标记的,而其对应没标记的就不要打印。
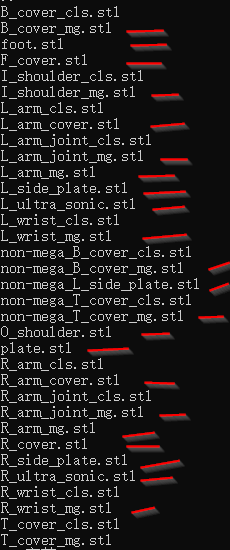
我标红线的是mg 电机的。归类一下,B_cover, F_cover, T_cover, plate, 4个的:I_shoulder, O_shoulder, foot, 2个的: L-arm, L_arm_cover, L_arm_joint, L_wrist, L_side_plate,R-arm, R_arm_cover, R_arm_joint, R_wrist, R_side_plate, 可选打印的,你需要超声波检测才需要 L_ultra_sonic, R_ultra_sonic。 这是我归类的,不一定准确。
整理了一下mg 电机,mega 主板需要打印的文件,readme.txt 有打印清单和数量,下载为:http://www.liwensoft.com/downloads/sportDog995.zip
部件安装视频1:http://www.liwensoft.com/downloads/SpotmicroAssemblyPart1.mp4
部件安装视频2:http://www.liwensoft.com/downloads/SpotmicroAssemblyPart2.mp4
https://github.com/mike4192/spotMicro 介绍了软件安装,也有源代码
12个伺服电机Servos 应该按下面编号连接到 PCA 9685 控制板(control board):
- Right front knee
- Right front shoulder
- Right front hip
- Right back knee
- Right back shoulder
- Right back hip
- Left back knee
- Left back shoulder
- Left back hip
- Left front knee
- Left front shoulder
- left front hip
资料还在整理中,你有好的建议,或链接吗?
用pynq 做的链接:https://www.hackster.io/adam-taylor/pynq-robotarm-478833