Python - 动态规划之寻找并显示所有路径
一.引言
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。
求可能的路径个数。

二.获取路径条数
1.动态规划
这是动态规划最基础的一个题目,转化到坐标系中,主要信息有两个:
A. 网格大小 M x N,起始点 (0,0) 终点 (m-1, n-1)
B. 每次只能向下或者向右移动,假设当前点 (k, j),则下一步的坐标可能为 (k , j+1) 或者是 (k+1, j)
def uniquePaths(m, n):
"""
:type m: int
:type n: int
:rtype: int
"""
# 构建初始网格
grid = [[0] * n for _ in range(m)]
printMap(grid)
# 初始化计数
for i in range(m):
grid[i][0] = 1
for j in range(n):
grid[0][j] = 1
printMap(grid)
for i in range(1, m):
for j in range(1, n):
left = up = 0
up = grid[i - 1][j]
left = grid[i][j - 1]
grid[i][j] = left + up
printMap(grid)
return grid
m = 3
n = 7
result = uniquePaths(m, n)2.代码分析
上面是主函数,主要分3个步骤:
A.构建初始网络
这一步主要初始化一个 M x N 的网格代表机器人 前进的地图
[0, 0, 0, 0, 0, 0, 0]
[0, 0, 0, 0, 0, 0, 0]
[0, 0, 0, 0, 0, 0, 0]B.初始化计数
由于要求只能向下或者向右行进,所以针对最左边 (0, y) 和最上边 (x, 0) 的值都为1,因为到达所有位置的路线只有 1 条
[1, 1, 1, 1, 1, 1, 1]
[1, 0, 0, 0, 0, 0, 0]
[1, 0, 0, 0, 0, 0, 0]C.遍历累加
对除了 (0, y) 和 (x , 0) 的点进行状态累加,对于位置 (1, 1) 从起始点到其位置可能性有两种,一种是 (0, 1) -> (1, 1) 或者是 (1, 0) -> (1, 1) ,所以 v(1, 1) = 1 + 1 = 2 ,即左侧和上面的可能性之后,之后的点以此类推,这里把整个规划问题分成若干个局部小问题解决。最后 (m-1, n-1) 的数值代表所有的可能性。
========================
[1, 1, 1, 1, 1, 1, 1]
[1, 2, 0, 0, 0, 0, 0]
[1, 0, 0, 0, 0, 0, 0]
========================
[1, 1, 1, 1, 1, 1, 1]
[1, 2, 3, 0, 0, 0, 0]
[1, 0, 0, 0, 0, 0, 0]
========================
[1, 1, 1, 1, 1, 1, 1]
[1, 2, 3, 4, 0, 0, 0]
[1, 0, 0, 0, 0, 0, 0]
========================
......
========================
[1, 1, 1, 1, 1, 1, 1]
[1, 2, 3, 4, 5, 6, 7]
[1, 3, 6, 10, 15, 0, 0]
========================
[1, 1, 1, 1, 1, 1, 1]
[1, 2, 3, 4, 5, 6, 7]
[1, 3, 6, 10, 15, 21, 0]
========================
[1, 1, 1, 1, 1, 1, 1]
[1, 2, 3, 4, 5, 6, 7]
[1, 3, 6, 10, 15, 21, 28]
========================def printMap(m):
for line in m:
print(line)
print("========================")辅助函数负责把网格打出来,可以看到完整的过程。
三.获取路径坐标
上面通过动态规划的方法,可以获得起点到终点路线方案总和,但是不能只管的看到路径的走向,下面通过决策树方法遍历的到所有路径。
1.构造决策树
对于每一个点,他都有 0-2 种可能, 0 对应终点,1 对应下边界, 2 对应其他点,从起点 (0, 0) 开始,依次递归,最终到达 (m-1, n-1) 的终点。对于这样发散延伸的结构,适合树结构,所以除了使用动态规划的方法,可以使用树,不仅可以求路径总数,也可以获取全部路径坐标。
A.获取每个点的下一步
col_bound = n - 1
row_bound = m - 1
start = "0_0"
end = changeIndex(row_bound, col_bound)
print("start: %s end: %s" % (start, end))
def getAllPossibility():
possibility = {}
print("Col 边界: %s Row 边界: %s" % (col_bound, row_bound))
for i in range(0, m):
for j in range(0, n):
cur_index = "%d_%d" % (i, j)
possibility[cur_index] = []
if (i + 1) <= row_bound and j <= col_bound:
possibility[cur_index].append(changeIndex(i + 1, j))
if i <= row_bound and (j + 1) <= col_bound:
possibility[cur_index].append(changeIndex(i, j + 1))
return possibility
# 获取全部情况
allPossibility = getAllPossibility()根据上面最后的结果图,可以遍历出来每个点可以走的点位,终点 (m-1, n-1) 的 List 为空 ,这里
changeIndex 就是把 row,col 通过 _ 拼接起来:
def changeIndex(_i, _j):
return "%d_%d" % (_i, _j){'0_0': ['1_0', '0_1'], '0_1': ['1_1', '0_2'], '0_2': ['1_2', '0_3'],
'0_3': ['1_3', '0_4'], '0_4': ['1_4', '0_5'], '0_5': ['1_5', '0_6'],
'0_6': ['1_6'], '1_0': ['2_0', '1_1'], '1_1': ['2_1', '1_2'],
'1_2': ['2_2', '1_3'], '1_3': ['2_3', '1_4'], '1_4': ['2_4', '1_5'],
'1_5': ['2_5', '1_6'], '1_6': ['2_6'], '2_0': ['2_1'], '2_1': ['2_2'],
'2_2': ['2_3'], '2_3': ['2_4'], '2_4': ['2_5'], '2_5': ['2_6'], '2_6': []}
B.生成决策树
通过上面的 dict 可以递归生成决策树,根据列表 [] 的长度判断向左还是向右递归,有需要可以在 BitNode 逻辑中加入前序,中序,后续遍历的逻辑,前面也给到过: 遍历决策树https://blog.csdn.net/BIT_666/article/details/118222309?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163550588716780264063245%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=163550588716780264063245&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_v2~rank_v29-1-118222309.pc_v2_rank_blog_default&utm_term=dfs&spm=1018.2226.3001.4450 https://blog.csdn.net/BIT_666/article/details/118222309?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163550588716780264063245%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=163550588716780264063245&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_v2~rank_v29-1-118222309.pc_v2_rank_blog_default&utm_term=dfs&spm=1018.2226.3001.4450
https://blog.csdn.net/BIT_666/article/details/118222309?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163550588716780264063245%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=163550588716780264063245&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_v2~rank_v29-1-118222309.pc_v2_rank_blog_default&utm_term=dfs&spm=1018.2226.3001.4450
# 构建二叉树类
class BitNode:
def __init__(self):
self.data = None
self.left = None
self.right = None
def map2tree(pro, root_data, leap_data):
data = pro[root_data]
length = len(data)
if length != 0:
_root = BitNode()
_root.data = root_data
if length == 1:
_root.left = map2tree(pro, data[0], leap_data)
else:
_root.left = map2tree(pro, data[0], leap_data)
_root.right = map2tree(pro, data[1], leap_data)
else:
_root = BitNode()
_root.data = leap_data
return _root
# 获取决策树
root = map2tree(allPossibility, start, end)2.获取根节点到每个叶节点的路径
决策树的基本操作,继续使用递归实现,concatPath 方法不断累加路径长度并递归,直到终点达到递归退出条件随后将完整路径添加至 all_path
all_path = []
# 获取一棵树顶点到每个叶节点的路径
def getPath(_root):
if _root.left is None and _root.right is None:
all_path.append(_root.data)
else:
if _root.left is not None:
concatPath(_root.left, _root.data)
if _root.right is not None:
concatPath(_root.right, _root.data)
def concatPath(_root, data):
if _root.left is None and _root.right is None:
all_path.append(data + "->" + _root.data)
return
else:
if _root.left is not None:
concatPath(_root.left, data + "->" + _root.data)
if _root.right is not None:
concatPath(_root.right, data + "->" + _root.data)
# 获取全部路径
getPath(root)0_0->1_0->2_0->2_1->2_2->2_3->2_4->2_5->2_6
0_0->1_0->1_1->2_1->2_2->2_3->2_4->2_5->2_6
0_0->1_0->1_1->1_2->2_2->2_3->2_4->2_5->2_6
0_0->1_0->1_1->1_2->1_3->2_3->2_4->2_5->2_6
......
0_0->0_1->0_2->0_3->0_4->1_4->1_5->1_6->2_6
0_0->0_1->0_2->0_3->0_4->0_5->1_5->2_5->2_6
0_0->0_1->0_2->0_3->0_4->0_5->1_5->1_6->2_6
0_0->0_1->0_2->0_3->0_4->0_5->0_6->1_6->2_6
Total Path Num: 28
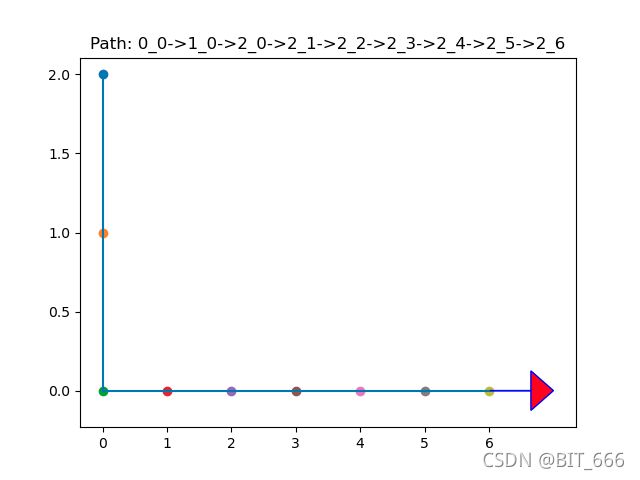
四.绘制路线图
本来上面拿到全部路径就够了,心想还是不够完美,如果是一个完整的项目需求,除了线路坐标,如果能够给出真实的线路图那就更好了,所以接下来使用 matplotlib 把所有路径简单展示一下。
def plotPathMap(path):
points = list(map(lambda point: point.split("_"), path.split("->")))
lines = [[], []]
for row, col in points:
change_row = col
change_col = int(row_bound) - int(row)
lines[0].append(change_row)
lines[1].append(change_col)
plt.scatter(change_row, change_col)
plt.plot(lines[0], lines[1])
plt.title("Path: " + path)
plt.arrow(col_bound, 0, 1, 0, length_includes_head=True, head_width=0.25, head_length=0.35, fc='r', ec='b')
plt.show()
for path in all_path:
print(path)
plotPathMap(path)
print("Total Path Num: %d" % len(all_path))由于原始坐标系和 matplotlib 的坐标系是中心对称且上下颠倒的的,所以得到的坐标需要经过转换才能还原到图布中,当然如果不想转换坐标系,也可以讲题目修改为机器人在左下角,目标点在右上角。为了表示方向,这里使用了 arrow 增加了箭头指向。
......

五.总结
上面大概是基本的动态回归和树相关的实现,有更好的实现思路和方法可以一起进步!