OpenCV之Canny边缘检测
边缘检测一般是识别目标图像中亮度变化明显的像素点. 因为显著变化的像素点通常反映了图像变化比较重要的地方.
1. Canny 边缘检测理论
Canny 是一种常用的边缘检测算法. 其是在 1986 年 John F.Canny 提出的.
Canny 是一种 multi-stage 算法,分别如下:
具体流程:
- 高斯滤波:平滑图像,消除噪声
- 梯度和方向计算:利用Sobel算子计算每个像素点的梯度和方向
- 非极大值抑制:消除边缘检测带来的杂散相应
- 双阈值:检测真正和潜在的边缘
- 抑制弱边缘:通过抑制弱边缘来完成边缘检测
1.1、高斯滤波
高斯滤波最重要的还是卷积核核,通常使用高斯平滑滤波器卷积降噪,这里以size=3的高斯内核为例:这里做了归一化处理(元素和为 1)
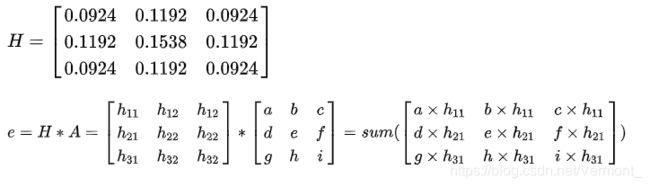
高斯去噪其实就是一个低通滤波器,滤除高频噪声。
1.2、Sobel算子计算梯度和方向
计算方法:

这里 ![]() 是指水平方向的掩码模板,
是指水平方向的掩码模板,![]() 是指垂直方向的掩码模板。根据上面的模板可以计算出图像梯度幅值和方向。
是指垂直方向的掩码模板。根据上面的模板可以计算出图像梯度幅值和方向。

1.3、非极大值抑制(定位准确的边缘同时可缩小边缘线宽)
非极大值抑制是进行边缘检测的重要步骤,通俗的来说,就是获取局部的最大值,将非极大值所对应的灰度值设置为背景像素点。像素邻近区域满足梯度值的局部最优值判断为该像素的边缘,对非极大值相关信息进行抑制。利用这个准则可以剔除大部分的非边缘点。
简单的说呢?就是保留梯度大的像素点点,对于那些在边缘旁边的杂散点,梯度相对较小,利用非极大值抑制就可以很好的去除杂散点。
1.4、双阈值检测
这里的双阈值并不是说介于阈值之间的像素保留,外面的的去除。这里的阈值检测有所不同。
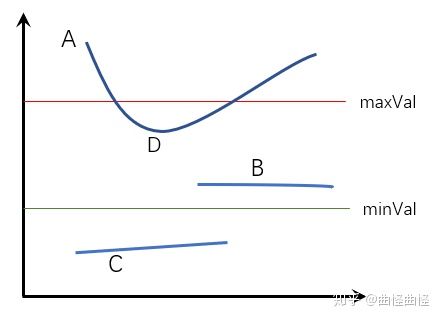
分析:
- 梯度大于maxVal的像素点保留,视为边缘
- 梯度小于minVal的像素点弃用,不视为边缘
- 梯度介于两者之间的,分情况判断:
- 四周有包含大于maxVal的像素点,视为边缘
- 四周没有大于maxVal的像素点,不视为边缘
根据上面的分析,我们可以得出来:A, D点位边界; B, C点不是边界。
注意:
具体这两个值怎么设置,我们就要分析两个值变化对图像的影响。
- maxVal: 带来最明显的差异,增大maxVal无疑会导致原来的边界点可能会直接消失。但这种消失时是成片消失。
- minVal: 增大minVal,会导致有些待定像素点被弃用,也就是靠近边界像素点的介于双阈值之间的被弃用。导致的现象就是边界出现破损,这种非成片消失。只是边界信息不完整。
下面以 video = cv2.Canny(img, 80, 250) 为例:分别增大minVal和maxVal。
- 增大minVal: (边界出现缺损)

- 增大maxVal: (边界出现成片消失,边界信息完整)

总结:
在实际应用中,观察梯度图像,如果边界信息缺损,那么适当的减小minVal;如果有不想要的区域出现,那么适当的增加MaxVal。
2. OpenCV 之 Canny 边缘检测
OpenCV 提供了 cv2.canny() 函数.
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])- 参数 Image - 输入图片,必须为单通道的灰度图
- 参数 threshold1 和 threshold2 - 分别对应于阈值 minVal 和 maxVal
- 参数 apertureSize - 用于计算图片提取的 Sobel kernel 尺寸. 默认为 3.
- 参数 L2gradient - 指定计算梯度的等式. 当参数为 True 时,采用 1.2 中的梯度计算公式,其精度更高;否则采用的梯度计算公式为:. 该参数默认为 False.
具体代码:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('test.jpg', 0)
edges = cv2.Canny(img, 100, 200)
plt.subplot(121), plt.imshow(img, cmap='gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image'), plt.xticks([]), plt.yticks([])
plt.show()
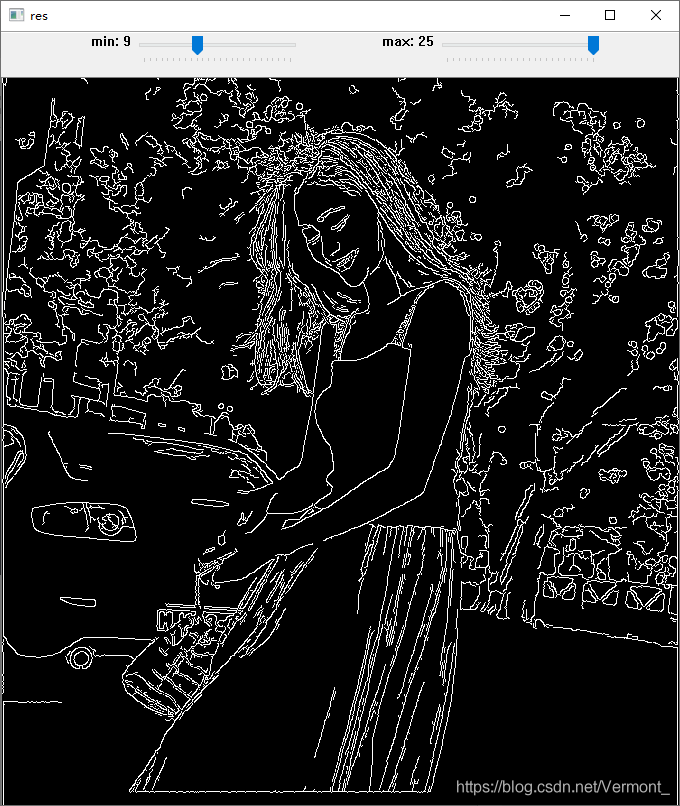
带 minVal 和 maxVal 滑动条的使用:
import numpy as np
import cv2
def nothing(x):
pass
img=cv2.imread('test.jpg',0)
cv2.namedWindow('res')
cv2.createTrackbar('min','res',0,25,nothing)
cv2.createTrackbar('max','res',0,25,nothing)
while(1):
if cv2.waitKey(1) & 0xFF == 27:
break
maxVal=cv2.getTrackbarPos('max','res')
minVal=cv2.getTrackbarPos('min','res')
canny=cv2.Canny(img,10*minVal,10*maxVal)
cv2.imshow('res',canny)
cv2.destroyAllWindows()