深度学习模型在FPGA上的部署
编辑丨阿chai带你学AI
我是来自山区、朴实、不偷电瓶的AI算法工程师阿chai,给大家分享人工智能、自动驾驶、机器人、3D感知相关的知识
今天给大家介绍一下FPGA上部署深度学习的算法模型的方法以及平台。希望通过介绍,算法工程师在FPGA的落地上能“稍微”缓和一些,小白不再那么迷茫。阿chai最近在肝一个开源的项目,等忙完了会给大家出几期FPGA上从零部署的教程,包括一些底层的开发、模型的量化推理等等,因为涉及的东西太多了,所以得分开写 。
。

FPGA与“迷宫”
深度学习这里就不多介绍了,我们接下来介绍一下FPGA是什么。FPGA是现场可编程逻辑门阵列,灵活性非常高,现场编程真的香。说到这里小伙伴们可能还是不太明白,那么我们和ARM对比一下,ARM可以理解为比如这有一个迷宫,迷宫有很多进口也有对应的出口,道路中间有很多“暗门”可以走,对ARM芯片做编程就是触发当中一条通路,路是死的,我们不好改变。FPGA是如果我们想要一个迷宫,FPGA给提供了一个大的“盒子”,里面有很多的“隔板”,我们自己搭建一条就可以了,你想要什么样的路就什么样子,类似玩我的世界,只不过“矿”是各种逻辑门。那就意味着,FPGA可以设计外围电路也可以设计CPU,是不是很爽,当然,爽的背后开发难度也是相当的大的,这种“特定属性”非常时候做人工智能的算法加速。由于制作特殊电路,FPGA之前经常用做信号处理中,配合DSP或者ARM使用,后来也有用FPGA或者CPLD搭建“矿机”当“矿老板”(祝愿”挖矿“的天天矿难)。
小白入门A:PYNQ
PYNQ是Python + ZYNQ,用Python进行FPGA开发,首先强调一点,Python近几年非常火,虽然很强大,但是他开发硬件不是真的就做硬件,希望大家不要迷。
教程:https://github.com/xupsh/Advanced-Embedded-System-Design-Flow-on-Zynq
我们类比一下很火的MicroPython,使用Python开发硬件是得有特定的电路设计的,除非自己是大佬修改底层的固件,但是都修改底层了,是不是可以自己开发就好了。当然这个是面向小白的,对应的开发板如下图。
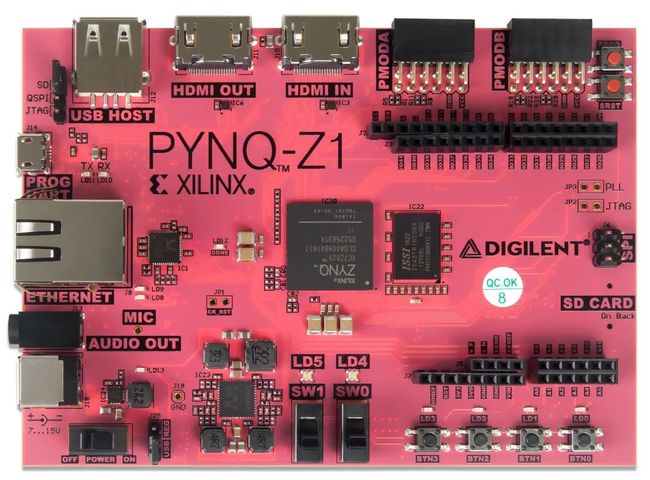
这个板子类似我们之前玩MicroPython,也是各种调包。实际上ZYNQ是一个双核ARM Cortex-A9处理器和一个FPGA,使用Python的话可以通过Jupyter进行开发,是不是很香,所以这个非常适合小白。
FPGA上跑BNN(二值神经网络)是非常不错的,“PYNQ-Z1不同的机器学习数据集(dataset)的测试结果显示:对于MNIST数据集PYNQ-Z1能实现每秒168000张图片的分类,延迟102微妙,准确率达98.4%;对于CIFAR-10、SVHN、GTSRB数据集PYN1-Z1能实现每秒1700张图片的分类,延迟2.2毫秒,准确率分别为80.1%、96.69%和97.66%,系统功耗均保持在2.5W左右。”
这个到底有多方便,我们看一段代码,首先我们调用模型:
import bnn
hw_classifier = bnn.CnvClassifier(bnn.NETWORK_CNVW1A1,'cifar10',bnn.RUNTIME_HW)
sw_classifier = bnn.CnvClassifier(bnn.NETWORK_CNVW1A1,'cifar10',bnn.RUNTIME_SW)
进行测试:
from IPython.display import display
im = Image.open('car.png')
im.thumbnail((64, 64), Image.ANTIALIAS)
display(im)
car_class = hw_classifier.classify_image_details(im)
print("{: >10}{: >13}".format("[CLASS]","[RANKING]"))
for i in range(len(car_class)):
print("{: >10}{: >10}".format(hw_classifier.classes[i],car_class[i]))
同样支持matplotlib进行数据可视化:
%matplotlib inline
import matplotlib.pyplot as plt
x_pos = np.arange(len(car_class))
fig, ax = plt.subplots()
ax.bar(x_pos - 0.25, (car_class/100.0), 0.25)
ax.set_xticklabels(hw_classifier.classes, rotation='vertical')
ax.set_xticks(x_pos)
ax.set
plt.show()
这不就是Python嘛,真的是非常的方便,而且图像处理也兼容使用Pillow。文件中给出了一些图像识别的例子,大家可以去看看。改天阿chai给大家出一个从零搭建PYNQ的教程,包括模型的量化推理等等。
小白入门B:DPU
DPU是一个用于卷积神经网络的可编程引擎。该单元包含寄存器配置模块、数据控制器模块和卷积计算模块。当然,强大的PYNQ也是支持使用DPU的,如果用这个直接看Python的API就可以了,开发板可以使用ZCU104。大神很多直接用ZYNQ开整的,但是那个难度真的不适合初学者去看,等忙完了项目阿chai给小伙伴们整个这个的教程。

我们首先clone下来项目并且编译:
git clone https://github.com/Xilinx/DPU-PYNQ.git
cd DPU-PYNQ/upgrade
make
安装pynq-dpu:
pip install pynq-dpu
启动jupyter-notebook:
pynq get-notebooks pynq-dpu -p .
模型库在如下链接中。
模型库:https://github.com/Xilinx/Vitis-AI/tree/v1.3
对于DPU的设计,我们需要在自己的电脑上进行,在添加模块后,我们使用如下命令进行编译:
make BOARD=
对于ZYNQ+DPU的开发过程阿chai会单独出一期,因为涉及的东西太多了。。。
支持国产框架:Paddle-Lite
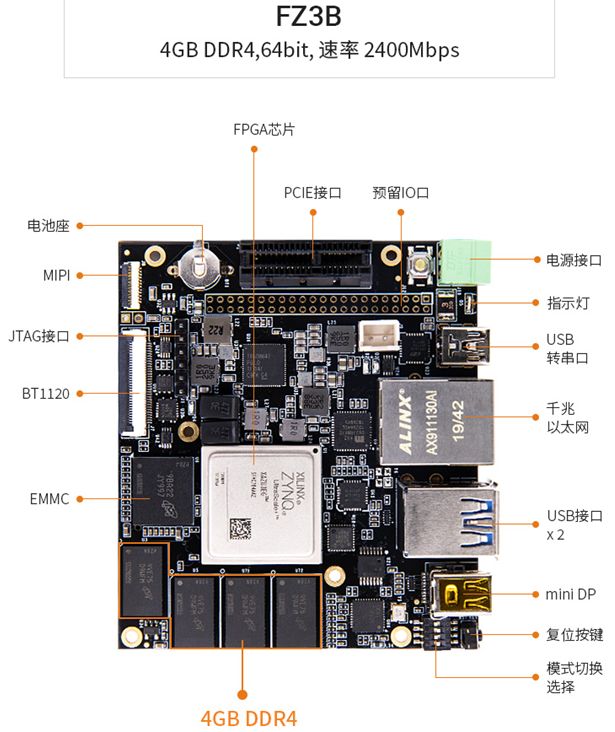
既然python都可以,那肯定Paddle-Lite这种推理框架也是可行的,百度也有专门的部署开发套件 EdgeBoard。EdgeBoard是基于Xilinx Zynq UltraScale+ MPSoC系列芯片打造的计算卡,芯片内部集成ARM处理器+GPU+FPGA的架构,既具有多核处理能力、也有视频流硬解码处理能力,还具有FPGA的可编程的特点。
其实部署的思路小伙伴们应该有一些眉目了,就是将自己训练的深度学习模型转换成Paddle Lite模型,然后移植到EdgeBoard开发板上进行测试。接下来我们简单看看是怎样操作的。
EdgeBoard中模型的测试由json文件做管理:
{
"model":"测试的模型",
"combined_model":true,
"input_width":224,
"input_height":224,
"image":"测试的路径",
"mean":[104,117,124],
"scale":1,
"format":"BGR"
"threshold":0.5
}
详细的操作请前往Paddle Lite的GitHub,这里只做简单的流程介绍。
GitHub: https://github.com/PaddlePaddle/Paddle-Lite
如果不想编译,直接在如下网址中下载编译好的文件即可。
编译后的文件:https://ai.baidu.com/ai-doc/HWCE/Yk3b95s8o
1.安装测试
我们首先在有在开发板上编译Paddle Lite,编译的时候需要设置cmake的参数,设置LITE_WITH_FPGA=ON和LITE_WITH_ARM=ON,问就是我们都用到。对应的FPGA的编译脚本是lite/tools/build_FPGA.sh,我们执行即可。
sh ./lite/tools/build_fpga.sh
make publish_inference -j2
接下来我们编译示例demo,demo也在刚才的下载链接中。
板子的使用过程请参考百度官方的文档,文档介绍的非常的清楚,阿chai这里就不花时间去讲解使用过程了。
然后进入demo中进行编译:
# classification
cd /home/root/workspace/sample/classification/
mkdir build
cd build
cmake ..
make
build目录下会出现image_classify和video_classify两个可执行文件,图片预测运行image_classify文件。
使用FPGA 进行resnet50进行测试:
./image_classify_fpga_preprocess ../configs/resnet50/drink.json
可以看到对应的输出结果,同样detection的模型测试方式也这样操作。
2.可调用的接口
C++
C++的主要包括预处理以及预测库的接口。
预处理接口主要是使用FPGA完成图片的缩放、颜色空间转换和mean/std操作。
预测库接口主要完成模型的初始化、输入参数构造、预测和结果获取。
预处理接口示例:
/**
* 判断输入图像是否是wc 16对齐
* width 输入图像宽度
* channel 输入图像高度
**/
bool img_is_align(int width, int channel);
/**
* 对齐后的大小
* width 输入图像宽度
* channel 输入图像高度
**/
int align_size(int width, int channel);
/**
* 分配存放图片的内存,析构函数会自动释放 (目前支持BGR->RGB RGB->BGR YUV422->BGR YUV->RGB) 图像最大分辨率支持1080p
* height 输入图像的框
* width 输入图像宽度
* in_format 输入图像格式 参考image_format
* return uint8_t* opencv Mat CV_8UC3
**/
uint8_t* mem_alloc(int img_height, int img_width, image_format in_format);
预测库使用步骤
1、模型初始化,构建预测对象
std::unique_ptr g_predictor;
PaddleMobileConfig config;
std::string model_dir = j["model"];
config.precision = PaddleMobileConfig::FP32;
config.device = PaddleMobileConfig::kFPGA;
config.prog_file = model_dir + "/model";
config.param_file = model_dir + "/params";
config.thread_num = 4;
g_predictor = CreatePaddlePredictor(config);
2、输入输出参数
std::vector paddle_tensor_feeds;
PaddleTensor tensor;
tensor.shape = std::vector({1, 3, input_height, input_width});
tensor.data = PaddleBuf(input, sizeof(input));
tensor.dtype = PaddleDType::FLOAT32;
paddle_tensor_feeds.push_back(tensor);
PaddleTensor tensor_imageshape;
tensor_imageshape.shape = std::vector({1, 2});
tensor_imageshape.data = PaddleBuf(image_shape, 1 * 2 * sizeof(float));
tensor_imageshape.dtype = PaddleDType::FLOAT32;
paddle_tensor_feeds.push_back(tensor_imageshape);
PaddleTensor tensor_out;
tensor_out.shape = std::vector({});
tensor_out.data = PaddleBuf();
tensor_out.dtype = PaddleDType::FLOAT32;
std::vector outputs(1, tensor_out);
3、预测
g_predictor->Run(paddle_tensor_feeds, &outputs);
4、获取结果
float *data = static_cast(outputs[0].data.data());
int size = outputs[0].shape[0];
Python
EdgeBoard系统已经安装了python环境,用户可直接使用即可,同时python接口为用户提供了paddlemobile的python安装包以及示例工程。
文件名称
说明
paddlemobile-0.0.1.linux-aarch64-py2.tar.gz |
paddlemobile的python2安装包 |
edgeboard.py |
基于python的模型预测示例 |
api.py |
edgeboard.py的api示例 |
configs.classification |
分类模型的配置文件目录,同C++示例的配置文件 |
configs.detection |
检测模型的配置文件目录,同C++示例的配置文件 |
models.classification |
分类模型的模型文件目录,同C++示例的模型文件 |
models.detection |
检测模型的模型文件目录,同C++示例的模型文件 |
安装paddlemobile-python SDK,在根目录中解压
tar -xzvf home/root/workspace/paddlemobile-0.0.1.linux-aarch64-py2.tar.gz
例如使用分类模型的测试如下:
python api.py -j 你测试的json文件
详细的使用说明请关注Paddle-Lite的GitHub。

介绍了这几种,其实大家可以看出来,入门使用并不难,难的是底层的硬件设计与算法加速量化等等,这些都是打包好的东西,我们真的开发还是得慢慢的扣底层的。在这里借用一位大神说的话,现在人工智能算法工程师和十年前的嵌入式工程师差不多,从需求到硬件、软件、算法、应用等等都能做,貌似真的是这样,太卷了,不多学点真的要凉。工具是越来越好用,难的是轮子怎么造,一起加油。
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「计算机视觉工坊」公众号后台回复:深度学习,即可下载深度学习算法、3D深度学习、深度学习框架、目标检测、GAN等相关内容近30本pdf书籍。
下载2
在「计算机视觉工坊」公众号后台回复:计算机视觉,即可下载计算机视觉相关17本pdf书籍,包含计算机视觉算法、Python视觉实战、Opencv3.0学习等。
下载3
在「计算机视觉工坊」公众号后台回复:SLAM,即可下载独家SLAM相关视频课程,包含视觉SLAM、激光SLAM精品课程。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的知识点汇总、入门进阶学习路线、最新paper分享、疑问解答四个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近3000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~