Android 平台人脸检测并不复杂
一、前言
上周,我们将于老师分享给开发者的 libfacedetection 开源库在 Windows 11 CLion 环境下实践了一把,速度快,效果好。
恰逢今日不加班,秉承着实践出真知的原则移植至 Android 平台。
二、环境准备
-
Android Studio 2020.3.1
-
OpenCV 4.5.4
-
CMake 3.10.2
-
libfacedetection 源码(https://github.com/ShiqiYu/libfacedetection)
三、工程实践
实现效果:基于 libfacedetection 源码实现 Android 平台图片人脸检测
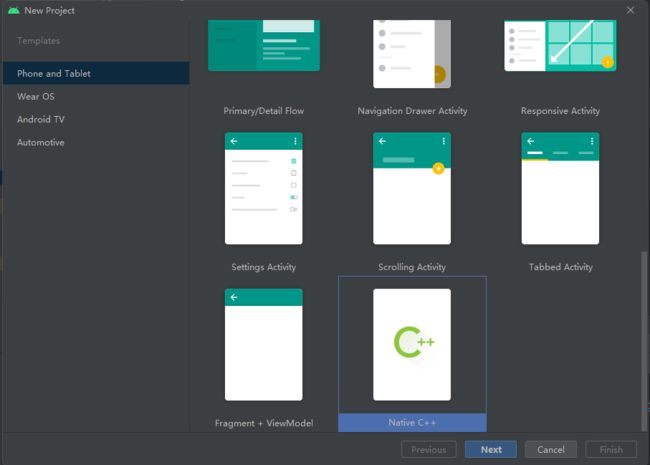
3.1 创建工程
File -> New -> New Project -> Native C++
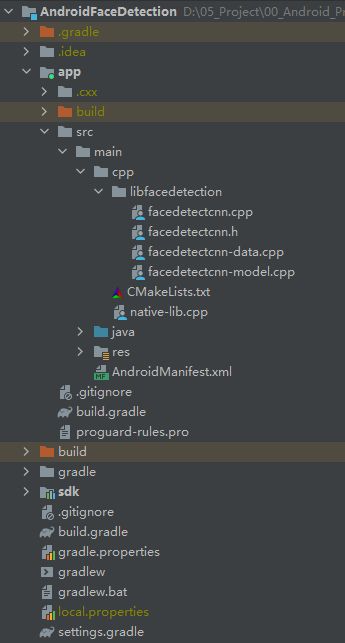
3.2 CPP 目录下导入 libfacedetection 源码
新建文件夹
libfacedetection,并复制src目录下的 4 个文件即可。
为了避免编译错误和提高运行效率,做如下几点调整:
| 文件名 | 调整内容 |
|---|---|
| facedetectcnn.h | 注释掉 #include "facedetection_export.h" |
| facedetectcnn.h | 删除 FACEDETECTION_EXPORT |
3.3 导入OpenCV-android-sdk
下载地址:https://sourceforge.net/projects/opencvlibrary/files/4.5.4/opencv-4.5.4-android-sdk.zip/download
解压后,将文件夹 OpenCV-android-sdk\sdk 以 Module 的形式导入至我们刚才新建的工程。这里就不得不提到之前我们讲到的一个 Android Studio BUG,如果你无法正常导入,按照文中方式操作即可。导入操作完成后,目录结构应大致如下:
3.3 修改 CMakeLists.txt
3.3.1 添加配置项
option(ENABLE_OPENMP "use openmp" ON)
option(ENABLE_INT8 "use int8" ON)
option(ENABLE_AVX2 "use avx2" OFF)
option(ENABLE_AVX512 "use avx512" OFF)
option(ENABLE_NEON "whether use neon, if use arm please set it on" ON)
option(DEMO "build the demo" OFF)
add_definitions("-O3")
if(ENABLE_OPENMP)
message("using openmp")
add_definitions(-D_OPENMP)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} ${OpenMP_CXX_FLAGS}")
set(CMAKE_EXE_LINKER_FLAGS "${CMAKE_EXE_LINKER_FLAGS} ${OpenMP_EXE_LINKER_FLAGS}")
endif()
if(ENABLE_INT8)
message("using int8")
add_definitions(-D_ENABLE_INT8)
endif()
IF(CMAKE_CXX_COMPILER_ID STREQUAL "GNU"
OR CMAKE_CXX_COMPILER_ID STREQUAL "Clang")
message("use -O3 to speedup")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -O3")
ENDIF()
if(ENABLE_AVX512)
add_definitions(-D_ENABLE_AVX512)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -mavx512bw")
endif()
if(ENABLE_AVX2)
add_definitions(-D_ENABLE_AVX2)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -mavx2 -mfma")
endif()
if(ENABLE_NEON)
message("Using NEON")
add_definitions(-D_ENABLE_NEON)
add_definitions(-DANDROID_ARM_NEON=ON)
endif()
3.3.2 配置头文件、源文件和 OpenCV
set(opencv_libs ${PROJECT_SOURCE_DIR}/../../../../sdk/native/libs)
set(opencv_includes ${PROJECT_SOURCE_DIR}/../../../../sdk/native/jni/include)
include_directories(${PROJECT_SOURCE_DIR}/include)
include_directories(${opencv_includes})
add_library(libopencv_java4 SHARED IMPORTED)
set_target_properties(libopencv_java4 PROPERTIES
IMPORTED_LOCATION "${opencv_libs}/${ANDROID_ABI}/libopencv_java4.so")
file(GLOB_RECURSE face_source_files ${PROJECT_SOURCE_DIR}/libfacedetection/*.cpp)
message("${face_source_files}")
3.3.3 编译目标
add_library( # Sets the name of the library.
detection
# Sets the library as a shared library.
SHARED
# Provides a relative path to your source file(s).
native-lib.cpp
${face_source_files})
3.3.4 链接
target_link_libraries( # Specifies the target library.
detection
# Links the target library to the log library
# included in the NDK.
${log-lib}
libopencv_java4)
3.4 编写示例
对源码
mobile/Android目录下的示例代码,稍加调整,已供参考。
3.4.1 native-lib.cpp
#include
#include
#include
#include "libfacedetection/facedetectcnn.h"
#include
//define the buffer size. Do not change the size!
#define DETECT_BUFFER_SIZE 0x20000
using namespace cv;
char *JNITag = const_cast("facedetection-jni");
extern "C" JNIEXPORT jobjectArray JNICALL
Java_tech_kicky_face_detection_MainActivity_facedetect(JNIEnv *env,jobject /* this */,jlong matAddr)
{
jobjectArray faceArgs = nullptr;
Mat& img = *(Mat*)matAddr;
Mat bgr = img.clone();
cvtColor(img, bgr, COLOR_RGBA2BGR);
__android_log_print(ANDROID_LOG_ERROR, JNITag,"convert RGBA to BGR");
//load an image and convert it to gray (single-channel)
if(bgr.empty())
{
fprintf(stderr, "Can not convert image");
return faceArgs;
}
int * pResults = NULL;
//pBuffer is used in the detection functions.
//If you call functions in multiple threads, please create one buffer for each thread!
unsigned char * pBuffer = (unsigned char *)malloc(DETECT_BUFFER_SIZE);
if(!pBuffer)
{
fprintf(stderr, "Can not alloc buffer.\n");
return faceArgs;
}
///
// CNN face detection
// Best detection rate
//
//!!! The input image must be a BGR one (three-channel)
//!!! DO NOT RELEASE pResults !!!
pResults = facedetect_cnn(pBuffer, (unsigned char*)(bgr.ptr(0)), bgr.cols, bgr.rows, (int)bgr.step);
int numOfFaces = pResults ? *pResults : 0;
__android_log_print(ANDROID_LOG_ERROR, JNITag,"%d faces detected.\n", numOfFaces);
/**
* 获取Face类以及其对于参数的签名
*/
jclass faceClass = env->FindClass("tech/kicky/face/detection/Face");//获取Face类
jmethodID faceClassInitID = (env)->GetMethodID(faceClass, "", "()V");
jfieldID faceConfidence = env->GetFieldID(faceClass, "faceConfidence", "I");//获取int类型参数confidence
jfieldID faceLandmarks = env->GetFieldID(faceClass, "faceLandmarks", "[Lorg/opencv/core/Point;");//获取List类型参数landmarks
jfieldID faceRect = env->GetFieldID(faceClass, "faceRect","Lorg/opencv/core/Rect;");//获取faceRect签名
/**
* 获取RECT类以及对应参数的签名
*/
jclass rectClass = env->FindClass("org/opencv/core/Rect");//获取到RECT类
jmethodID rectClassInitID = (env)->GetMethodID(rectClass, "", "()V");
jfieldID rect_x = env->GetFieldID(rectClass, "x", "I");//获取x的签名
jfieldID rect_y = env->GetFieldID(rectClass, "y", "I");//获取y的签名
jfieldID rect_width = env->GetFieldID(rectClass, "width", "I");//获取width的签名
jfieldID rect_height = env->GetFieldID(rectClass, "height", "I");//获取height的签名
/**
* 获取Point类以及对应参数的签名
*/
jclass pointClass = env->FindClass("org/opencv/core/Point");//获取到Point类
jmethodID pointClassInitID = (env)->GetMethodID(pointClass, "", "()V");
jfieldID point_x = env->GetFieldID(pointClass, "x", "D");//获取x的签名
jfieldID point_y = env->GetFieldID(pointClass, "y", "D");//获取y的签名
faceArgs = (env)->NewObjectArray(numOfFaces, faceClass, 0);
//print the detection results
for(int i = 0; i < (pResults ? *pResults : 0); i++)
{
short * p = ((short*)(pResults+1))+142*i;
int confidence = p[0];
int x = p[1];
int y = p[2];
int w = p[3];
int h = p[4];
__android_log_print(ANDROID_LOG_ERROR, JNITag,"face %d rect=[%d, %d, %d, %d], confidence=%d\n",i,x,y,w,h,confidence);
jobject newFace = (env)->NewObject(faceClass, faceClassInitID);
jobject newRect = (env)->NewObject(rectClass, rectClassInitID);
(env)->SetIntField(newRect, rect_x, x);
(env)->SetIntField(newRect, rect_y, y);
(env)->SetIntField(newRect, rect_width, w);
(env)->SetIntField(newRect, rect_height, h);
(env)->SetObjectField(newFace,faceRect,newRect);
env->DeleteLocalRef(newRect);
jobjectArray newPoints = (env)->NewObjectArray(5, pointClass, 0);
for (int j = 5; j < 14; j += 2){
int p_x = p[j];
int p_y = p[j+1];
jobject newPoint = (env)->NewObject(pointClass, pointClassInitID);
(env)->SetDoubleField(newPoint, point_x, (double)p_x);
(env)->SetDoubleField(newPoint, point_y, (double)p_y);
int index = (j-5)/2;
(env)->SetObjectArrayElement(newPoints, index, newPoint);
env->DeleteLocalRef(newPoint);
__android_log_print(ANDROID_LOG_ERROR, JNITag,"landmark %d =[%f, %f]\n",index,(double)p_x,(double)p_y);
}
(env)->SetObjectField(newFace,faceLandmarks,newPoints);
env->DeleteLocalRef(newPoints);
(env)->SetIntField(newFace,faceConfidence,confidence);
(env)->SetObjectArrayElement(faceArgs, i, newFace);
env->DeleteLocalRef(newFace);
}
//release the buffer
free(pBuffer);
return faceArgs;
}
3.4.2 MainActivity.kt
package tech.kicky.face.detection
import android.graphics.BitmapFactory
import androidx.appcompat.app.AppCompatActivity
import android.os.Bundle
import android.widget.TextView
import org.opencv.android.Utils
import org.opencv.core.MatOfRect
import org.opencv.core.Point
import org.opencv.core.Scalar
import org.opencv.imgproc.Imgproc
import org.opencv.imgproc.Imgproc.FONT_HERSHEY_SIMPLEX
import tech.kicky.face.detection.databinding.ActivityMainBinding
class MainActivity : AppCompatActivity() {
private lateinit var binding: ActivityMainBinding
override fun onCreate(savedInstanceState: Bundle?) {
super.onCreate(savedInstanceState)
binding = ActivityMainBinding.inflate(layoutInflater)
setContentView(binding.root)
testFaceDetect()
}
private fun testFaceDetect() {
val bmp = BitmapFactory.decodeResource(resources, R.drawable.basketball) ?: return
var str = "image size = ${
bmp.width}x${
bmp.height}\n"
binding.imageView.setImageBitmap(bmp)
val mat = MatOfRect()
val bmp2 = bmp.copy(bmp.config, true)
Utils.bitmapToMat(bmp, mat)
val FACE_RECT_COLOR = Scalar(255.0, 0.0, 0.0, 255.0)
val FACE_RECT_THICKNESS = 3
val TEXT_SIZE = 2.0
val startTime = System.currentTimeMillis()
val facesArray = facedetect(mat.nativeObjAddr)
str += "detectTime = ${
System.currentTimeMillis() - startTime}ms\n"
for (face in facesArray) {
val text_pos = Point(
face.faceRect.x.toDouble() - FACE_RECT_THICKNESS,
face.faceRect.y - FACE_RECT_THICKNESS.toDouble()
)
Imgproc.putText(
mat,
face.faceConfidence.toString(),
text_pos,
FONT_HERSHEY_SIMPLEX,
TEXT_SIZE,
FACE_RECT_COLOR
)
Imgproc.rectangle(mat, face.faceRect, FACE_RECT_COLOR, FACE_RECT_THICKNESS)
for (landmark in face.faceLandmarks) {
Imgproc.circle(
mat,
landmark,
FACE_RECT_THICKNESS,
FACE_RECT_COLOR,
-1,
Imgproc.LINE_AA
)
}
}
str += "face num = ${
facesArray.size}\n"
Utils.matToBitmap(mat, bmp2)
binding.imageView.setImageBitmap(bmp2)
binding.textView.text = str
}
/**
* A native method that is implemented by the 'detection' native library,
* which is packaged with this application.
*/
external fun facedetect(matAddr: Long): Array<Face>
companion object {
// Used to load the 'detection' library on application startup.
init {
System.loadLibrary("detection")
}
}
}
3.5 运行结果

四、总结
单张图片运行速度和效果整体符合官方数据。速度快且效果不错。
| Method | Time | FPS | Time | FPS |
|---|---|---|---|---|
| Single-thread | Single-thread | Multi-thread | Multi-thread | |
| cnn (CPU, 640x480) | 492.99ms | 2.03 | 149.66ms | 6.68 |
| cnn (CPU, 320x240) | 116.43ms | 8.59 | 34.19ms | 29.25 |
| cnn (CPU, 160x120) | 27.91ms | 35.83 | 8.43ms | 118.64 |
| cnn (CPU, 128x96) | 17.94ms | 55.74 | 5.24ms | 190.82 |