基于HAL库的STM32外部中断模式
基于HAL库的STM32外部中断模式
板子:STM32F103C8
编译工具:Keil&STM32CubeMX
烧录工具:FlyMcu
串口调试工具:XCOM
文章目录
- 基于HAL库的STM32外部中断模式
-
- 〇、什么是中断
-
- 1. 数据输出方式
- 2. 中断过程
- 3. 中断程序执行过程
- 4. 作用
- 5. 中断优先级
- 6. 中断向量
- ------中断控制LED灯亮灭------
- 一、STMCubeMX配置项目
-
- 1. 引脚配置
- 2. GPIO与NVIC设置
- 3. 生成项目
- 二、Keil配置代码
- 三、实际效果
- --------中断串口通信--------
- 四、STMCubeMX配置项目
-
- 1. 设置引脚
- 2. 使能USERT1中断
- 3. 生成项目
- 五、Keil配置代码
- 六、实际效果
- 七、总结
- 八、参考文章
〇、什么是中断
指处理机处理程序运行中出现的紧急事件的整个过程.程序运行过程中,系统外部、系统内部或者现行程序本身若出现紧急事件,处理机立即中止现行程序的运行,自动转入相应的处理程序(中断服务程序),待处理完后,再返回原来的程序运行,这整个过程称为程序中断;当处理机接受中断时,只需暂停一个或几个周期而不执行处理程序的中断,称为简单中断.
中断又可分为屏蔽中断和非屏蔽中断两类.可由程序控制其屏蔽的中断称为屏蔽中断或可屏蔽中断.屏蔽时,处理机将不接受中断.反之,不能由程序控制其屏蔽,处理机一定要立即处理的中断称为非屏蔽中断或不可屏蔽中断.非屏蔽中断主要用于断电、电源故障等必须立即处理的情况.处理机响应中断时,不需执行查询程序.由被响应中断源向CPU发向量地址的中断称为向量中断,反之为非向量中断.向量中断可以提高中断响应速度。
1. 数据输出方式
处理器和外部设备的数据传输方式:
① 无条件传输:处理器不必了解外部设备状态,直接进行数据传输,用于指示灯和按键等简单设备
② 查询方式:传输前,一方先查询另一方的状态,若已经准备好就传输,否则就继续查询
③ 中断方式:一方通过申请中断的方式与另一方进行数据传输,收发双方可以并行工作
④ 直接存储器访问:处理器内部建立片内外设和内存之间的数据传输通道,传输过程不需要处理器参与
2. 中断过程
中断发生:当CPU在处理某一事件A时,发生了另一事件B,请求CPU迅速去处理
↓↓↓↓↓↓↓↓
中断处理:CPU暂停当前的工作,转去处理事件B
↓↓↓↓↓↓↓↓
中断返回:当CPU将事件B处理完毕后,再回到事件A中被暂停的地方继续处理事件A
3. 中断程序执行过程

4. 作用
- 可以解决快速的CPU与慢速的外部设备之间的传送数据的矛盾。
- CPU可以分时为多个外部设备服务,提高计算机的利用率。
- CPU能够及时处理应用系统的随机事件,增强系统的实用性。
- CPU可以处理设备故障及掉电等突发事件,提高系统可靠性。
5. 中断优先级
处理器根据不同中 断的重要程序设置 不同的优先等级。 不同优先级中断的 处理原则是:高级 中断可以打断低级 中断;低级中断不 能打断高级中断。
6. 中断向量
中断服务程序:在响应一个特定中断的时候,处理器会执行一个函数,该函数一般称为中断处理程序或者中断服务程序
中断向量和中断向量表:
- 中断向量:中断服务程序在内存中的入口地址称为中断向量。
- 中断向量表:把系统中所有的中断向量集中起来放到存储器的某一区
域内,这个存放中断向量的存储区就叫中断向量表
------中断控制LED灯亮灭------
一、STMCubeMX配置项目
1. 引脚配置
- A6输出控制LED灯的亮灭,所以为
GPIO_Output - A4持续输出高电平,同上
- B0持续输出低电平,同上
- B5模拟按钮,设置为
GPIO_Exit5

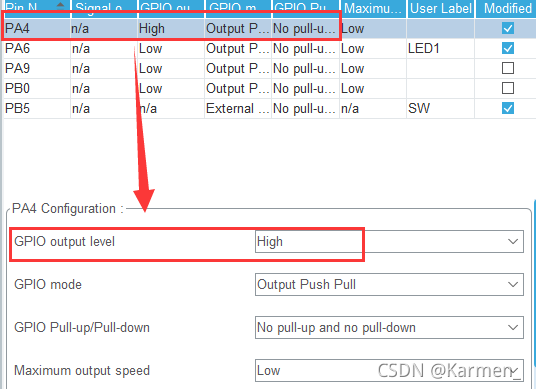
2. GPIO与NVIC设置
-
B5引脚的GPIO mode设置为Rising/Falling

-
A4设置为高电平输出,A6,B0不管,因为CubeMX默认设置是低电平
-
设置用户标签,方便写代码。这一步看自己,我不推荐,因为不是每一个人的CubeMX都可以成功生成对应代码
笔者在这里使用了用户标签来写函数但报错了,原因是未声明,但是按理来说CubeMX应该在生成代码时用#define声明了这几个标签,可是没有,所以我也不建议非要用用户标签来写代码。
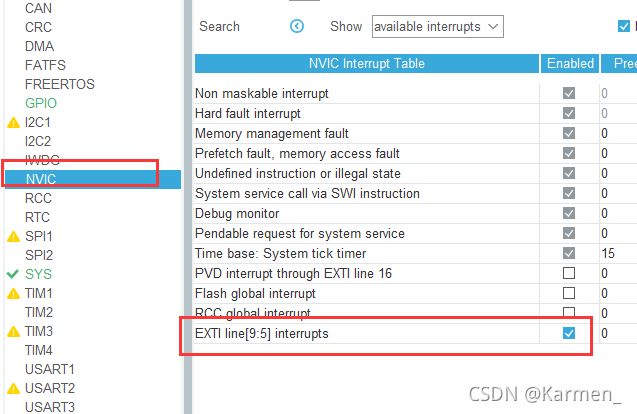
- NVIC中勾选EXTI line[9:5] interrupts
3. 生成项目
因为本次使用到的是Keil,所以我们在IDE这一栏要选择MDK-ARM,Version选择V5及以上。其他的不再多说

这里记得勾选,用于创造一些必要的头文件

二、Keil配置代码
生成Keil代码后点击Open project来到keil界面:
-
点击
stm32f1xx_hal_gpio.c文件可以找到中断服务函数
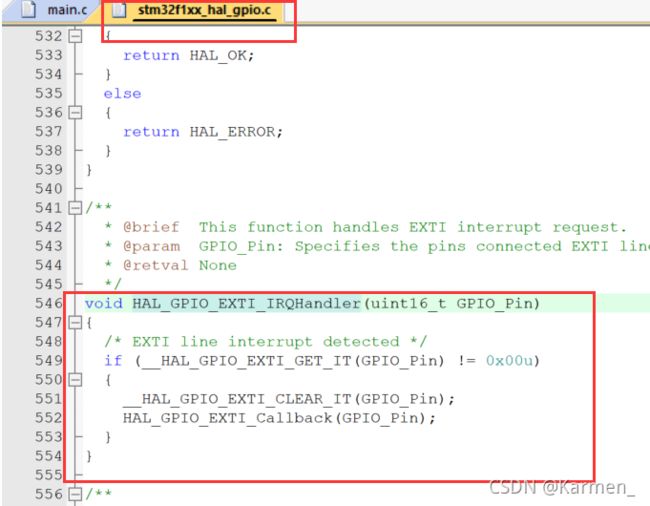
右键点击stm32f1xx_hal_gpio.c,选择F12,进入该函数声明部分,往下划,找到HAL_GPIO_EXTI_Callback

这个函数是回调函数,前面__weak表示此函数为虚函数,需要用户重写。 -
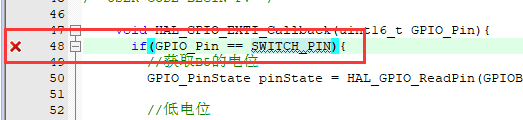
在里面重写下列代码
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){
if(GPIO_Pin == GPIO_PIN_5){
//获取B5的电位
GPIO_PinState pinState = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5);
//低电位
if(pinState==GPIO_PIN_RESET)
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_RESET);//把A6变为低电位
//高电位
else
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_SET);//把A6变为高电位
}
}
- 编译生成.hex文件,烧录
在此之前记得配置一下魔法棒!
三、实际效果
--------中断串口通信--------
四、STMCubeMX配置项目
1. 设置引脚
根据F103C8原理图,得知PA9,PA10分别负责串口1的发送和接收
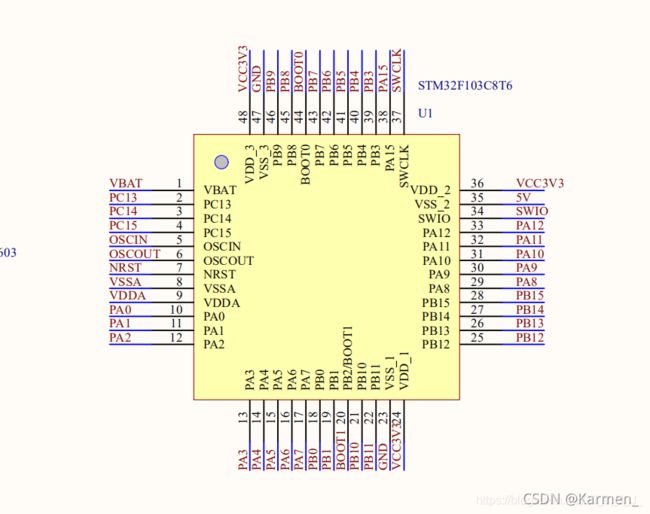
所以将PA9,PA10引脚的TXD,RXD激活

2. 使能USERT1中断

3. 生成项目
步骤和配置LED一致,不再叙述。
五、Keil配置代码
- 在
main.c中添加以下声明
uint8_t aRxBuffer; //接收中断缓冲
uint8_t Uart1_RxBuff[256]; //接收缓冲
uint8_t Uart1_Rx_Cnt = 0; //接收缓冲计数
uint8_t cAlmStr[] = "数据溢出(大于256)\r\n";
- 在int main(void){}之后找到如下位置修改代码
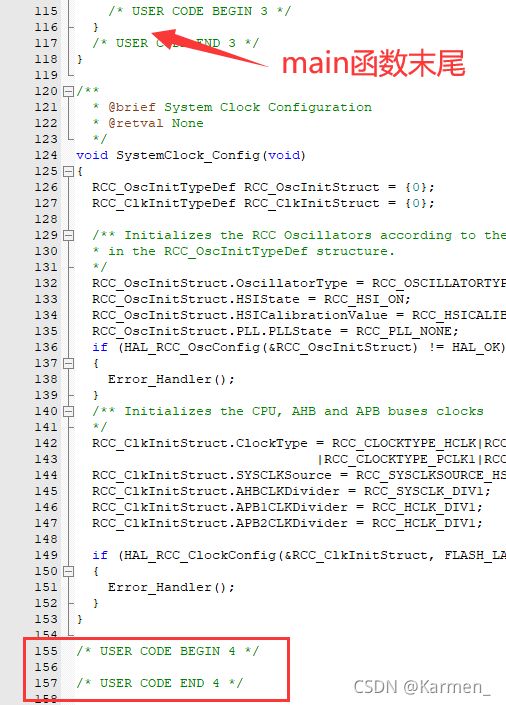
/* USER CODE BEGIN 4 */
/**
* @brief Rx Transfer completed callbacks.
* @param huart pointer to a UART_HandleTypeDef structure that contains
* the configuration information for the specified UART module.
* @retval None
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_UART_TxCpltCallback could be implemented in the user file
*/
if(Uart1_Rx_Cnt >= 255) //溢出判断
{
Uart1_Rx_Cnt = 0;
for(int i=0;i<255;i++)
{
Uart1_RxBuff[i]=0;
}
HAL_UART_Transmit(&huart1, (uint8_t *)&cAlmStr, sizeof(cAlmStr),0xFFFF);
}
else
{
Uart1_RxBuff[Uart1_Rx_Cnt++] = aRxBuffer; //接收数据转存
if((Uart1_RxBuff[Uart1_Rx_Cnt-1] == 0x0A)&&(Uart1_RxBuff[Uart1_Rx_Cnt-2] == 0x0D)) //判断结束位
{
HAL_UART_Transmit(&huart1, (uint8_t *)&Uart1_RxBuff, Uart1_Rx_Cnt,0xFFFF); //将收到的信息发送出去
Uart1_Rx_Cnt = 0;
for(int i=0;i<255;i++)
{
Uart1_RxBuff[i]=0;
} //清空数组
}
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1); //再开启接收中断
}
/* USER CODE END 4 */
- 编译烧录
六、实际效果
七、总结
通过中断操作可以更加灵活地使用程序,如果有必要还能够设置优先级使程序能够优先处理紧急任务。
八、参考文章
https://blog.csdn.net/ChenJ_1012/article/details/120962950
https://blog.csdn.net/qq_45659777/article/details/121110712