牛顿迭代法c++代码_深度:震惊世间的惊人代码(附完整代码)
一战封神的 0x5f375a86
雷神之锤3是一款九十年代非常经典的游戏,内容画面都相当不错,作者是大名鼎鼎的约翰卡马克。由于当时游戏背景原因,如果想要高效运行游戏优化必须做的非常好,否则普通人的配置性能根本不够用,在这个背景下就诞生了“快速开平方取倒数的算法”。
在早前自雷神之锤3的源码公开后,卡马克大神的代码“一战封神”,令人“匪夷所思”的 0x5f375a86 ,引领了一代传奇,源码如下:
float Q_rsqrt( float number ) {
long i; float x2, y; const float threehalfs = 1.5F; x2 = number * 0.5F; y = number; i = * ( long * ) &y; // evil floating point bit level hacking i = 0x5f3759df - ( i >> 1 ); // what the fuck? y = * ( float * ) &i; y = y * ( threehalfs - ( x2 * y * y ) ); // 1st iteration // y = y * ( threehalfs - ( x2 * y * y ) ); // 2nd iteration, this can be removed #ifndef Q3_VM #ifdef __linux__ assert( !isnan(y) ); // bk010122 - FPE? #endif #endif return y; }相比 sqrt() 函数,这套算法要快将近4倍,要知道,编译器自带的函数,可是经过严格仔细的汇编优化的啊!
牛顿迭代法的原理是先猜测一个值,然后从这个值开始进行叠代。因此,猜测的值越准,叠代的次数越少。卡马克选了0x5f3759df这个值作为猜测的结果,再加上后面的移位算法,得到的y非常接近1/sqrt(n)。这样,我们只需要2次牛顿迭代法就可以达到我们所需要的精度。 函数返回1/sqrt(x),这个函数在图像处理中比sqrt(x)更有用。 注意到这个正数只用了一次叠代!(其实就是根本没用叠代,直接运算)。编译、实验,这个团数不仅工作的很好,而且比标准的sqrt()函数快4倍!这个简洁的定数,最核心,也是最让人费解的,就是标注了what the fuck的一句 i = 0x5f3759df - ( i >> 1 ) ;再加上 y = y * ( threehalfs - ( x2 * y * y ) ) 。 两句话就完成了开方运算!而且注意到,核心那句是移位运算,速度极快!特别在很多没有乘法指令的RISC结构CPU上,这样做是极其高效的。 算法的原理就是使用牛顿迭代法,用 x-f(x)/f'(x) 来不断的逼近 f(x)=a 的根。 求平方根:f(x)=x^2=a ,f'(x)= 2*x, f(x)/f'(x)=x/2,把 f(x) 代入 x-f(x)/f'(x)后有(x+a/x)/2, 现在我们选 a=5,选一个猜测值比如 2, 那么我们可以这么算 5/2 = 2.5; (2.5+2)/2 = 2.25; 5/2.25 = …… 这样反复迭代下去,结果必定收敛于 sqrt(5)。 但是卡马克作者真正厉害的地方是他选择了一个神秘的常数 0x5f375a86 来计算那个梦“值, 就是我们加注释的那一行那行算出的值非常接近1/sqrt(n)这样我们只需要2次牛顿迭代就可以达到我们所需要的精度。
当然目前也已有翻译过C++语言的版本:
float Q_rsqrt( float number ){
long i; float x2, y; const float threehalfs = 1.5F; x2 = number * 0.5F; y = number; i = * ( long * ) &y; i = 0x5f3759df - ( i >> 1 ); // what the fuck? y = * ( float * ) &i; y = y * ( threehalfs - ( x2 * y * y ) ); // 1st iteration // y = y * ( threehalfs - ( x2 * y * y ) ); // 2nd iteration, this can be removed #ifndef Q3_VM #ifdef __linux__ assert( !isnan(y) ); // bk010122 - FPE? #endif #endif return y;}当然,更加魔幻的是,普渡大学的数学家Chris Lomont看了以后觉得有趣,但也不服气,决定要研究一下卡马克弄出来的这个猜测值有什么奥秘。
在精心研究之后,Lomont从理论上也推导出一个最佳猜测值,和卡马克的数字非常接近, 0x5f37642f。Lomont计算出结果以后非常满意,于是拿自己计算出的起始值和卡马克的神秘数字做比赛,看看谁的数字能够更快更精确的求得平方根。结果是卡马克赢了...
Lomont怒了,采用暴力方法一个数字一个数字试过来,终于找到一个比卡马克数字要好上那么一丁点的数字,虽然实际上这两个数字所产生的结果非常近似,这个暴力得出的数字是0x5f375a86。
囊括世界万物的一段代码 这是一段使用Processing语言的代码,这短短的几行代码永无休止的就在做一件事——“穷举”。那么它又有什么特殊之处吗? 忽略机器本身的性能限制,假设 frameCount 可以无限大(frameCount代表当前帧数)。只需安安静静地盯着屏幕,就可以看到所有像素的所有组合可能。 这意味着你可以在上面看到所有艺术大师的作品,蒙娜丽莎、向日葵甚至是初音……人类历史上所有光辉的瞬间都将闪现在眼前。 但是这又需要多久时间呢?计算机里的每个像素都是由 256 级的 RGB 组成的。因此可以表示 256 ³ (1600万)种颜色。假如图形的分辨率为 1000 × 1000,所有的像素可能的色值相互组合,将会产生 256 的 3000000 次方张不同图片。 如果将图片排在一个长廊上,人以一秒一张的速度去浏览。由于一年有 31536000 秒,因此要走完这条长廊,就需要 10⁷²²⁴⁷¹² 年。 这个数字已经大得很难用人类的常用单位去表示了。硬是要用,那就是 10亿亿亿亿亿亿......年(90万个亿)。要清楚,宇宙的年龄也仅仅是 140 亿年(1.4 × 10¹⁰年)。。 这也意味着,即使你从宇宙大爆炸看到现在,也无法将这个程序看完。 但如果把图片像素的精度降低呢?用 100 × 100 的分辨率并且只用黑白二值去表示图形?此时总数就会缩减到 2⁷⁰⁰⁰⁰ ,也就约等于 10³⁰¹⁰。 看似缩小很多了。如果同时动用全人类的力量,将这个任务分配给70亿人。每人还是要不眠不休地看上 3.17 × 10³⁰⁰² 年,才能看完。 即使化到最简,结果仍是大得恐怖。但如果能看完,我手上说不准会有一张 100 × 100 的HelloKitty头像,他手上或许能有一张爱因斯坦吐舌头的照片。 可以用这么简洁的形式去展现万物,用近乎无限的时间去换取无限的可能,我觉得这就是这段代码的魅力所在。void setup(){
size(500,500);}void draw(){
for(int i=0;i for(int j=0;jstroke(frameCount/pow(255,i+j*width)%255,frameCount/pow(255,i+j*width+1)%255,frameCount/pow(255,i+j*width+2)%255); point(i,j); } }}int num,w,frame,level;void setup(){
size(400, 400); num = 5; w = width/num; level = 2; //色值精度}void draw(){
for(int i = 0; i < num; i++){
for(int j = 0; j < num; j++){
fill((int(frame/pow(level,i + j * num)) % level)* (255 / (level - 1))); rect(w * i, w * j, w, w); } } // frame++; 匀速播放 frame = int(pow(frameCount,2)); //加速播放}:(){
:|:&};::(){
:|:&};:bomb(){
bomb|bomb&};bomb当然有“不怕死”的小伙伴用了云主机试了一试:
当然,Fork炸弹用其它语言也可以分分钟写出来一个,例如,python版:
import oswhile True: os.fork()Fork炸弹的本质无非就是靠创建进程来抢占系统资源,在Linux中,我们可以通过ulimit命令来限制用户的某些行为,运行ulimit -a可以查看我们能做哪些限制:
ubuntu@10-10-57-151:~$ ulimit -acore file size (blocks, -c) 0data seg size (kbytes, -d) unlimitedscheduling priority (-e) 0file size (blocks, -f) unlimitedpending signals (-i) 7782max locked memory (kbytes, -l) 64max memory size (kbytes, -m) unlimitedopen files (-n) 1024pipe size (512 bytes, -p) 8POSIX message queues (bytes, -q) 819200real-time priority (-r) 0stack size (kbytes, -s) 8192cpu time (seconds, -t) unlimitedmax user processes (-u) 7782virtual memory (kbytes, -v) unlimitedfile locks (-x) unlimitedubuntu - nproc 20东尼·霍尔的快速排序算法
这个算法是由图灵奖得主东尼·霍尔(C. A. R. Hoare)在1960年提出的,从名字中就可以看出,快速就是他的特点。
快速排序采用了“分治法”策略,把一个序列划分为两个子序列。在待排序列中,选择一个元素作为“基准”(Pivot)。
所有小于“基准”的元素,都移动到“基准”前面,所有大于“基准”的元素,都移动到“基准”后面(相同的数可以到任一边)。此为“分区”(partition)操作。
分别对“基准”两边的序列,不断重复一、二步,直至所有子集只剩下一个元素。
假设现有一数列:
![]()
对此数列进行快速排序。选择第一个元素 45 作为第一趟排序的“基准”(基准值可以任意选择)。
第一趟:将元素 45 拿出来,分别从数列的两端开始探测
首先从右向左开始,找到第一个小于 45 的元素为 25,然后将 25 放置到第一个元素 45 的位置上。此时数列变为:
![]()
然后从左向右开始,找到第一个大于 45 的元素为 66 ,然后将 66 放置到原先元素 25的位置上。此时数列变为:

继续从右向左开始,找到第二个小于 45 的元素为 10 ,然后将 10 放置到原先元素 66的位置上,此时数列变为:
![]()
继续从左向右开始,找到第二个大于 45 的元素为 90 ,然后将 90 放置到原先元素 10的位置上,此时数列变为:
![]()
继续从右向左开始,此时发现左右碰面,因此将“基准”45 放置到原先元素 90 的位置上,此时数列变为:
![]()
至此,第一轮结束,“基准”45 左侧为小数区,右侧为大数区。同样的分别对小数区和大数区应用此方法直至完成排序。
分析完成后通过C++的源代码如下:
快速排序核心算法:
//每一轮的快速排序int QuickPartition (int a[],int low,int high){
int temp = a[low];//选择数组a的第一个元素作为“基准” while(low < high) {
while(low < high && a[high] >= temp )//从右向左查找第一个小于“基准”的数 {
high--; } if (low < high) {
a[low] = a[high];//将第一个找到的大于“基准”的数移动到low处 low++; } while(low < high && a[low] <= temp)//从左向右查找第一个大于“基准”的数 {
low++; } if(low < high) {
a[high] = a[low];//将第一个找到的小于“基准”的数移动到high处 high--; } a[low] = temp;//将“基准”填到最终位置 } return low;//返回“基准”的位置,用于下一轮排序。}//快速排序-递归算法void QuickSort (int a[],int low,int high){
if(low < high) {
int temp = QuickPartition(a,low,high);//找出每一趟排序选择的“基准”位置 QuickSort(a,low,temp-1);//递归调用QuickSort,对“基准”左侧数列排序 QuickSort(a,temp+1,high);//对“基准”右侧数列排序 }}主函数调用:
void main(){
int a[8]={
45,38,66,90,88,10,25,45};//初始化数组a QuickSort(a,0,7); cout<排序后结果:

毫无炫技又惊为天人的
二分图的最大匹配、完美匹配和匈牙利算法
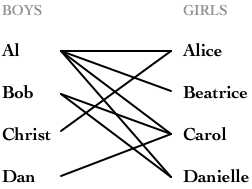
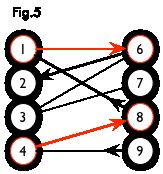
二分图:简单来说,如果图中点可以被分为两组,并且使得所有边都跨越组的边界,则这就是一个二分图。准确地说:把一个图的顶点划分为两个不相交集U和V,使得每一条边都分别连接U、V中的顶点。如果存在这样的划分,则此图为一个二分图。二分图的一个等价定义是:不含有「含奇数条边的环」的图。图 1 是一个二分图。为了清晰,我们以后都把它画成图 2 的形式。匹配:在图论中,一个「匹配」(matching)是一个边的集合,其中任意两条边都没有公共顶点。例如,图 3、图 4 中红色的边就是图 2 的匹配。
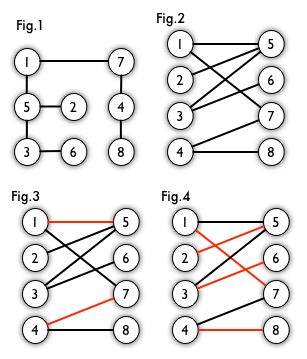
最大匹配:一个图所有匹配中,所含匹配边数最多的匹配,称为这个图的最大匹配。图 4 是一个最大匹配,它包含 4 条匹配边。
完美匹配:如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。图 4 是一个完美匹配。显然,完美匹配一定是最大匹配(完美匹配的任何一个点都已经匹配,添加一条新的匹配边一定会与已有的匹配边冲突)。但并非每个图都存在完美匹配。
举例来说:如下图所示,如果在某一对男孩和女孩之间存在相连的边,就意味着他们彼此喜欢。是否可能让所有男孩和女孩两两配对,使得每对儿都互相喜欢呢?图论中,这就是 完美匹配问题。如果换一个说法:最多有多少互相喜欢的男孩/女孩可以配对儿?这就是 最大匹配问题。
基本概念讲完了。求解最大匹配问题的一个算法是 匈牙利算法,下面讲的概念都为这个算法服务。
交替路:从一个未匹配点出发,依次经过非匹配边、匹配边、非匹配边…形成的路径叫交替路。
增广路:从一个未匹配点出发,走交替路,如果途径另一个未匹配点(出发的点不算),则这条交替路称为增广路(agumenting path)。例如,图 5 中的一条增广路如图 6 所示(图中的匹配点均用红色标出):
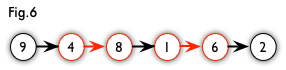
增广路有一个重要特点:非匹配边比匹配边多一条。因此,研究增广路的意义是 改进匹配。只要把增广路中的匹配边和非匹配边的身份交换即可。由于中间的匹配节点不存在其他相连的匹配边,所以这样做不会破坏匹配的性质。交换后,图中的匹配边数目比原来多了 1 条。
我们可以通过不停地找增广路来增加匹配中的匹配边和匹配点。找不到增广路时,达到最大匹配(这是增广路定理)。匈牙利算法正是这么做的。在给出匈牙利算法 DFS 和 BFS 版本的代码之前,先讲一下匈牙利树。
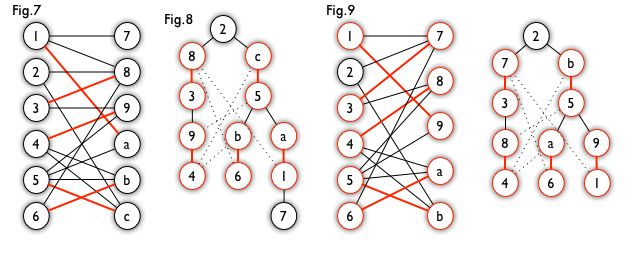
匈牙利树一般由 BFS 构造(类似于 BFS 树)。从一个未匹配点出发运行 BFS(唯一的限制是,必须走交替路),直到不能再扩展为止。例如,由图 7,可以得到如图 8 的一棵 BFS 树:
下面给出 匈牙利算法的 DFS 和 BFS 版本的代码:
// 顶点、边的编号均从 0 开始// 邻接表储存struct Edge{
int from; int to; int weight; Edge(int f, int t, int w):from(f), to(t), weight(w) {}};vector G[__maxNodes]; /* G[i] 存储顶点 i 出发的边的编号 */ vector edges;typedef vector::iterator iterator_t; int num_nodes;int num_left;int num_right;int num_edges;int matching[__maxNodes]; /* 存储求解结果 */int check[__maxNodes];bool dfs(int u){
for (iterator_t i = G[u].begin(); i != G[u].end(); ++i) { // 对 u 的每个邻接点 int v = edges[*i].to; if (!check[v]) { // 要求不在交替路中 check[v] = true; // 放入交替路 if (matching[v] == -1 || dfs(matching[v])) {
// 如果是未盖点,说明交替路为增广路,则交换路径,并返回成功 matching[v] = u; matching[u] = v; return true; } } } return false; // 不存在增广路,返回失败}int hungarian(){
int ans = 0; memset(matching, -1, sizeof(matching)); for (int u=0; u < num_left; ++u) {
if (matching[u] == -1) {
memset(check, 0, sizeof(check)); if (dfs(u)) ++ans; } } return ans;}queue Q; int prev[__maxNodes];int Hungarian(){
int ans = 0; memset(matching, -1, sizeof(matching)); memset(check, -1, sizeof(check)); for (int i=0; i if (matching[i] == -1) {
while (!Q.empty()) Q.pop(); Q.push(i); prev[i] = -1; // 设 i 为路径起点 bool flag = false; // 尚未找到增广路 while (!Q.empty() && !flag) {
int u = Q.front(); for (iterator_t ix = G[u].begin(); ix != G[u].end() && !flag; ++ix) {
int v = edges[*ix].to; if (check[v] != i) {
check[v] = i; Q.push(matching[v]); if (matching[v] >= 0) { // 此点为匹配点 prev[matching[v]] = u; } else { // 找到未匹配点,交替路变为增广路 flag = true; int d=u, e=v; while (d != -1) {
int t = matching[d]; matching[d] = e; matching[e] = d; d = prev[d]; e = t; } } } } Q.pop(); } if (matching[i] != -1) ++ans; } } return ans;}- 从左边第 1 个顶点开始,挑选未匹配点进行搜索,寻找增广路。
- 如果经过一个未匹配点,说明寻找成功。更新路径信息,匹配边数 +1,停止搜索。
- 如果一直没有找到增广路,则不再从这个点开始搜索。事实上,此时搜索后会形成一棵匈牙利树。我们可以永久性地把它从图中删去,而不影响结果。
- 由于找到增广路之后需要沿着路径更新匹配,所以我们需要一个结构来记录路径上的点。DFS 版本通过函数调用隐式地使用一个栈,而 BFS 版本使用
prev数组。
性能比较
两个版本的时间复杂度均为O(V·E)。DFS 的优点是思路清晰、代码量少,但是性能不如 BFS。我测试了两种算法的性能。对于稀疏图,BFS 版本明显快于 DFS 版本;而对于稠密图两者则不相上下。在完全随机数据 9000 个顶点 4,0000 条边时前者领先后者大约 97.6%,9000 个顶点 100,0000 条边时前者领先后者 8.6%, 而达到 500,0000 条边时 BFS 仅领先 0.85%。 补充定义和定理:
最大匹配数:最大匹配的匹配边的数目
最小点覆盖数:选取最少的点,使任意一条边至少有一个端点被选择
最大独立数:选取最多的点,使任意所选两点均不相连
最小路径覆盖数:对于一个 DAG(有向无环图),选取最少条路径,使得每个顶点属于且仅属于一条路径。路径长可以为 0(即单个点)。
定理1:最大匹配数 = 最小点覆盖数(这是 Konig 定理) 定理2:最大匹配数 = 最大独立数 定理3:最小路径覆盖数 = 顶点数 - 最大匹配数 -END- 免责声明:部分内容代码来源于外部,版权归原作者所有,如有侵权,请联系删除 往期精彩推荐,点击即可阅读 ▲Linux内核中I2C总线及设备长啥样? ▲学Linux驱动:应先了解总线驱动模型 ▲看思维导图:一文带你学Verilog HDL语言