使用STM32f103点亮led灯——库函数版本——实用篇1
前言
前一篇文章只是简单的让单片机的LED灯亮,虽然能够实现功能,但是程序都在主函数中,如果后期程序写的多就不利于大型程序的维护。
因此,需要以下步骤(使用的模板是正点原子的)
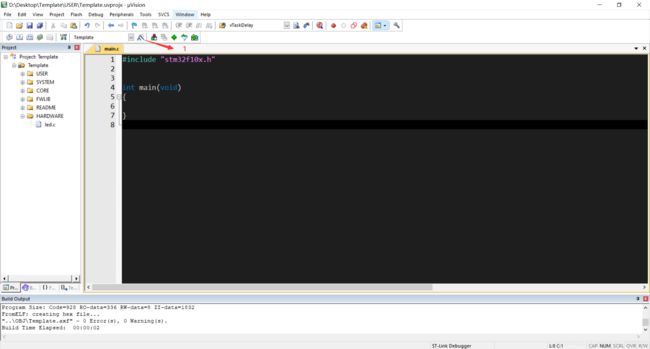
将main.c文件清理为以下格式
#include "stm32f10x.h"
int main(void)
{
}
//每个文件下必须留一行空行,不然就会有警告(keil自带bug)
现在的文件如图所示

需要在Template文件夹下建立HARDWARE(翻译过来为硬件的意思)
文件夹下再建立LED文件夹,LED文件夹下再建立led.c(在不同的函数中)源文件和led.h头文件(功能是存储.c内的所有函数以及变量等等,主函数(main.c)只需要引用.h文件就可以调用.c文件中书写的程序)
如图所示:

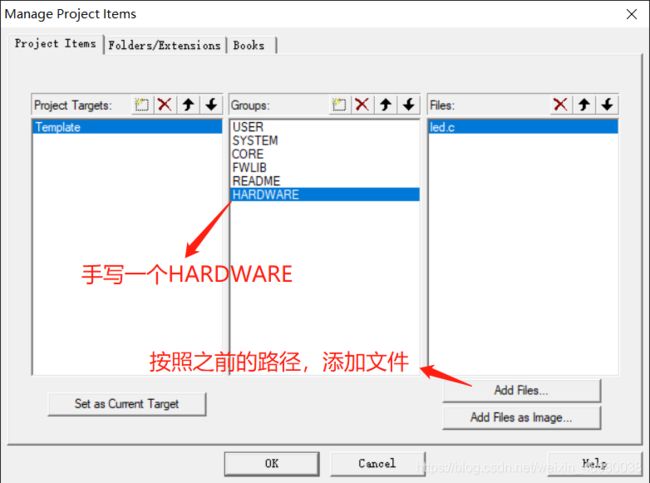

文件处理完毕,现在只需要添加编译路径,使主函数能够编译

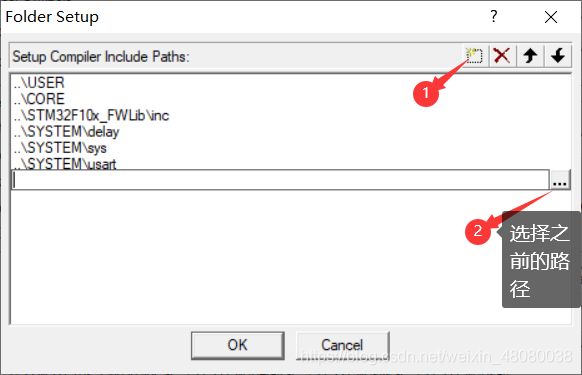
建立好之后

最后,为了方便,在main.c同级文件中建立main.h文件(这个文件主要包含所有的头文件,方便引用)
//条件编译的作用——避免多次编译而占用内存
#ifndef _MAIN_H
#define _MAIN_H
#include "sys.h"//引用系统函数(因为要使用led.h里面的PBout),sys.h文件里面包含了stm32f10x.h官方库文件
#include "led.h"
#endif
编写led.c,将上次文章的部分代码粘贴过来
#include "led.h"
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;//GPIO结构体初始化(将结构体指针重新换个名字,避免冲突)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启LED对应引脚的时钟(即GPIOB)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 |GPIO_Pin_5; //3种LED对应引脚全部开启
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //将模式设置为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚传输速度为50mhz
GPIO_Init(GPIOB, &GPIO_InitStructure); //GPIO初始化,第一个参数为对应引脚,第二个参数为结构体指针,选中GPIO_Init再右键Go To Definition of .......查询此结构的参数,过程与上一次相同
}
编写led.h文件
#ifndef LED_H
#define LED_H
#include "main.h"
#define LEDG PBout(0)
#define LEDB PBout(1)
#define LEDR PBout(5)
void LED_Init(void);
#endif
具体使用详见主函数
#include "main.h"
//以LED举例,LED的功能定义在led.c里面,主函数要想使用就得编译其定义的函数,(下面操作,请自行查看c语言的函数如果写在主函数后,怎么写)
void Init(void);//初始化函数,自己定义的一个函数,为了使主函数看起来舒服点,将所有的外设初始化都写在这里面,(纯属个人习惯)
int main(void)
{
Init();//外设初始化
while(1)
{
//RGB
LEDG = 0;//绿灯亮
LEDB = 0;//蓝灯亮
LEDR = 0;//红灯亮
}
}
void Init(void)
{
LED_Init();
}
应用
1.电磁阀(以气缸为例)
气缸是我们比赛中经常用到的东西,它通过压缩空气而产生动力,继而推动机器人不同的工作{气动夹子、气缸做支撑机构(可参考20届RC东华大学的机构,气缸做射箭机构(参考我们20届比赛的DR)等等}
到此为止, 下面我介绍以下单片机如何控制气缸以及气夹。
单片机通过控制控制继电器,继电器控制电磁阀进而控制气缸进气和出气。
如图所示,以一种继电器举例


结合图片所示,我们控制气缸的进气和出气只需要控制单片机io口的高低电平(结合继电器上跳线帽的接法)。
萌新求关注,文章会持续更新。