下一代的 3D Tiles 前瞻
原文:Introducing 3D Tiles Next, Streaming Geospatial to the Metaverse
原文发布时间:2021年11月10日
- 下一代的 3D Tiles 前瞻
- 译者概述
- 1. 综述
- 2. 元数据的增强
- 2.1. 元数据的类型系统
- 2.2. 不同层级的元数据(像素级别样式化渲染)
- 2.3. 语义规范
- 3. 空间索引增强:隐式瓦片分割
- 空间分割算法:S2
- 4. 在三维“图层”中使用复合内容
- 5. 与 glTF 技术生态集成
- 5.1. 直接使用 glTF(b3dm 与 i3dm 升级)
- 5.2. 点云与 glTF(pnts 升级)
- 5.3. 继承 glTF 的扩展项(纹理压缩)
- 6. 后续进度
- 7. 译者注
阅读本文前,需要有足够的 3D Tiles 1.0 基础、glTF 规范基础、CesiumJS 基础。
译者概述
3D Tiles Next 自官方有想法以来,我就一直在跟踪,无奈年关将至,业务繁忙,现在才着手阅读和学习。
3D Tiles Next 下文会简称 Next,而现行的 3D Tiles 1.0 则简称 1.0,因为官方暂时没把下一代正式称为 2.0.
从组织方式来说,Next 在 Tileset 和 瓦片文件层级均做了优化,Tileset 新建了多项扩展,瓦片文件则直接使用 glTF 格式,不再使用旧的 b3dm、i3dm、pnts、cmpt.
从性能考量来说,Next 引入新的空间索引规则,叫做 Implicit Tilling,即隐式瓦片分割,并介绍了一种空间分割算法:S2。
从领域需求来说,Next 强化了元数据、属性数据的组织,创建了 3D Metadata Specification(三维元数据规范)及相关的扩展。
此次更新不小,除了 Cesium 原班人马外,还有一个三维大佬 Don McCurdy 在后期添砖加瓦。
除了数据规范本身的更新,前端运行时 CesiumJS 在 1.87.1 版本终于公测了 Next,并提供了新的 glTF 数据加载架构 —— ModelExperimental,以及更友好的自定义着色器 API —— CustomShader。
1. 综述
3D Tiles Next,指的是一组 3D Tiles 扩展项。这些扩展项主要体现在三个方面的增强:
- 结构化的元数据
- 空间索引性能
- glTF 生态集成
官方关于元数据的限定词是
semantic,即语义化的,我觉得“结构化”可能更好一些。
如下图所示:



2. 元数据的增强
鉴于需求的急剧扩张,3D Tiles 扩充了元数据方面的功能。在 3D Tiles Next 中,引入一些元数据方面的扩展项。主要特点有:
- 元数据的编码方式更友好,可以用二进制,也可以写入 JSON;
- 层级扩充,可以是每纹理单元级别的元数据,也可以是每个瓦片级别的;
- 规范了元数据的格式。
与 1.0 规范使用 Batchtable(批次表)来存储元数据的目的一致,Next 的元数据扩展依旧遵循了性能优势:批量处理。
许多逻辑层面的三维要素(例如某个建筑)及其元数据,在前端运行时(可以简单认为是 CesiumJS)预先被成组成批处理,以减小 CPU 的开销。
元数据方面的扩展,分三个方面:
- 类型系统;
- 编码方式;
- 领域相关的语义化规范,领域是指 BIM、CAD 等;
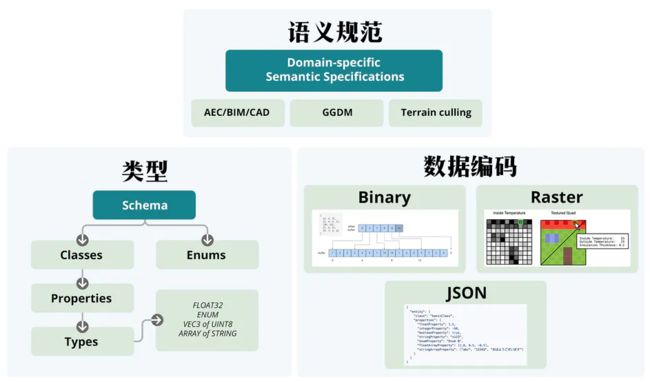
2.1. 元数据的类型系统
3D 元数据规范 定义了一套类型规范与数据的编码方式。
3D Tiles 1.0 依赖于 JSON 本身有限制的基础类型,而 Next 具备更丰富的类型支持,包括类、向量、矩阵等。
元数据的编码方式可以有:
- 二进制格式;
- JSON 格式;
- 栅格格式。
具体细节要看规范。
2.2. 不同层级的元数据(像素级别样式化渲染)
配合使用 3DTILES_metadata 和 EXT_mesh_features 两个扩展项,下一代的 3D Tiles 可以在各个层级存储元数据。这些层级可以是:
- Tileset(瓦片集)层级
- Tile / Tile ContentGroup(瓦片或瓦片组)层级
- Feature(三维要素)层级
- GPU 绘制实例层级
- Vertex(顶点)层级
- Texel(纹素)层级
如下图所示:

纹素级别是最细的层级,允许元数据在如此细的粒度上变化。
例如,两个三角形构成一个四边形,作为一个建筑物的一侧墙面,但是此时它仅仅是“两个三角形”,在真实世界中墙面还可能会有窗的玻璃、砖的石头的区别,在拾取识别时,就可以例用“纹素级别”的元数据来辨别什么颜色是什么物体。
下面是一个例子,对倾斜摄影数据使用纹素级别的元数据:
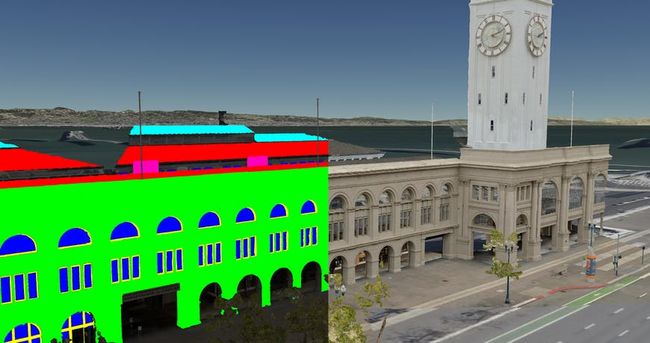
此处有分屏,左侧的颜色就可以很明显地区分出墙、窗户、空调、屋顶等“实际物体”,而数据的三角面组织却可以不用在意这些“实际物体”。
在右侧,利用纹素级别的元数据,就可以完成窗户单体的半透明处理。
2.3. 语义规范
除了层次足够细致,还要知道数据的含义,这就是所谓的“元数据的语义”,以便程序代码知道怎么进行交互编程。
例如,水泥地和草地的摩擦系数可以作为元数据,影响车辆的行驶速度等。
各领域的专家可以根据有关扩展项来定制自己专业所需的元数据,譬如在土方施工中,将材料库存、各项参数写入元数据,方便代码计算体积和面积。
3. 空间索引增强:隐式瓦片分割
3D Tiles Next 在空间分割上做了优化,光线追踪、近邻搜索这些空间分析、模拟功能从此受益。
在 1.0 中,空间分割体现在 tileset.json 文件中的每个 Tile 的定义,这些定义包括 BoundingVolume(空间范围体)、瓦片文件的模型以及其下一级的子瓦片等。
据官方介绍,3D Tiles 1.0 的空间分割方式可以自由搭配选择,不用局限于传统 2D 地图的四叉树分割。需要注意,子瓦片的空间范围要小于父瓦片的空间范围。
下面是 1.0 中介绍的三种空间分割树结构,依次为 KD树、松散四叉树、八叉树:

3D Tiles Next 引入了一个新的扩展:3DTILES_implicit_tiling,它主要的作用是引入一种预先知晓规则的空间分割规则,使得无需显式记录瓦片的空间范围体。这样,就可以随机访问单个或任意多个瓦片了,这样有益于:
- 单服务器或跨服务器的大规模模拟计算,尤其是 K-最近邻 和范围查询;
- 基于光追,或者说,基于射线的计算,因为统一的索引结构可以提高空间索引的性能;
- 局部数据更新,例如某块区域的建筑需要更新
城市级别的流式数据、建筑区域中随时间更新的数字孪生变化、飞行器的变化等,这些例子都将受益于上述所说的瓦片随机访问机制,而无需走原来的自顶向下的 LOD 层级访问机制。

上图表明,城市中的人群大规模模拟得以实现,主要是因为隐式空间索引机制,可以高效率地进行邻近瓦片的空间查询。
隐式瓦片分割机制,可以简洁地呈现 Tileset(瓦片集)的空间数据结构,包括:
- 四叉树或八叉树;
- RootTile(根瓦片)的几何误差(geometricError)和空间范围体(BoundingVolume),以支持全局或局部的 Tileset;
- 瓦片的可见性,这样可视化引擎(CesiumJS)只需请求存在的瓦片,减轻网络压力;
- 莫顿 z 序曲线(Morton z-order curve)存储了瓦片的其他信息;
- 模板式 URI,这样可以根据 URI 的规律,快速随机访问想要的瓦片而不需要再次自顶向下遍历整个 Tileset
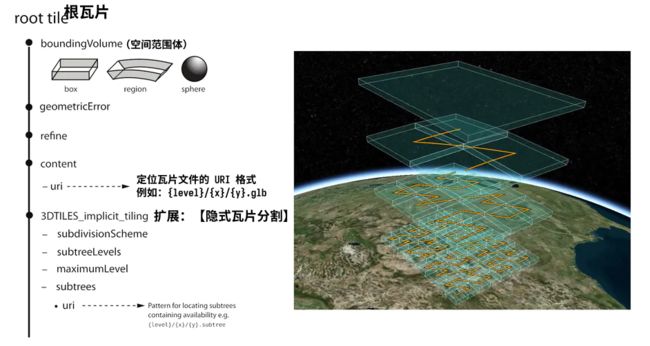
上面这张图,左边是 tileset.json 的大致示意,右边则是四级空间分割及其莫顿 Z 序曲线的显示效果。
与 1.0 中显式指定空间分割的瓦片相比,隐式分割还可以减小 tileset.json 的体积,降低网络压力。
但是与网络压力相比较,隐式瓦片分割的真正威力在于运行时可以随机访问瓦片,而且这些瓦片的空间分割规则是统一的。
除了空间检索性能上的考量,隐式瓦片分割还有一个意图,就是希望与传统 2D GIS 的 CDB、WMTS、TMS 等规范集成实现。
空间分割算法:S2
3D Tiles Next 引入一项 3DTILES_bounding_volume_S2 扩展,它能与隐式瓦片、显式瓦片一起使用,定义新的空间范围体。
S2 分割是一种比四叉树更好的空间分割,这种分割方式基于一个立方体,它在北极、南极附近的瓦片会比较“薄”,失真较小。同一级别的瓦片的尺寸是接近的。
笔者注:这个算法不太了解,需要阅读更多资料。

上图为 WGS84 椭球面上的 S2 Hilbert(希尔伯特)曲线。
4. 在三维“图层”中使用复合内容
传统 2DGIS 会把同类数据放进同一个容器中,这个容器叫做“图层”,比如高速公路图层、POI图层、建筑图层等,这样可以统一样式设置。
使用 3DTILES_multiple_contents 扩展可以在一组 Tile 中定义“三维图层元数据”,然后将对应的三维数据绑定至这个组来实现“三维图层”、“数据与元数据的连接”。
5. 与 glTF 技术生态集成
在 3D Tiles 中使用 3DTILES_content_gltf 扩展,Tile 对象可以直接引用 .gltf 或 .glb 文件,而不是使用旧的 b3dm、i3dm 瓦片文件。
这样 3D Tiles 就可以直接利用 glTF 社区的成果,例如验证工具、转换工具等。
3D Tiles Next 利用到 glTF 的地方有:
- 3D Tiles 在瓦片层级直接使用 glTF 作为三维数据;
- 将 glTF 直接用于点云格式;
- 更好利用了 glTF 的扩展项。
5.1. 直接使用 glTF(b3dm 与 i3dm 升级)
有阅读 3D Tiles 1.0 规范的朋友知道,b3dm 和 i3dm 瓦片文件是内嵌了 glTF 的二进制格式数据的。

上图展示了 1.0 和 Next 的瓦片文件设计区别,1.0 中最具代表性的 b3dm 瓦片文件由头部元数据(b3dm Header)、批次表(BatchTable)和具体模型数据(glTF)块构成,而 Next 则直接使用 glb 文件,且使用了 glTF 的 EXT_mesh_features 扩展来替代批次表。
使用 3DTILES_content_gltf 这个 3D Tiles 扩展,瓦片就可以直接引用 gltf 或 glb 文件。如果瓦片中存在逻辑要素信息,则可以在 gltf/glb 中启用 glTF 的扩展:EXT_mesh_features.
但是如果是 i3dm,比如一个树模型要绘制多次(即实例绘制的方式),那么就使用 glTF 扩展 EXT_mesh_gpu_instancing 来实现,以替代 i3dm 瓦片。EXT_mesh_features 也可以跟这个扩展一起使用,来记录每个被绘制后的实例的属性数据,如下图所示:

官方希望直接使用 glTF 的意图是可以更好地与其他行业的数据进行合作,以提高 3D Tiles 的模型兼容性。
5.2. 点云与 glTF(pnts 升级)

上图是某个城市的 100 亿个点的点云数据。
在 1.0 中,点云数据是使用 pnts 格式的文件存储的,包括 FeatureTable(要素表)、Batch Table(批次表),并可以带 draco 压缩。
在 Next 中,点云也可以使用 glTF 格式的文件,使用 glTF 中的 EXT_meshopt_compression 扩展即可实现一些运行时(CesiumJS)方面的样式化、过滤,甚至是点云的元数据等。总的来说,Next 对点云这种格式的数据:
- 将点云的几何数据存储在 glTF 本身
- 元数据(属性数据)通过 EXT_mesh_features 实现
- 顶点和法线数据的压缩通过 EXT_meshopt_compression 来实现。
如下图所示。

在最终敲定 Next 规范之前,官方还希望使用不同的压缩方式来补充 EXT_meshopt_compression 这个扩展如何进行点云压缩,包括 Esri LEPCC 和 Google Draco 等方式。
5.3. 继承 glTF 的扩展项(纹理压缩)
由于 Next 对瓦片文件的更新替换,不再使用 b3dm、i3dm、pnts 瓦片文件,因此功能上的更新基本上都是 glTF 的扩展。
3D Tiles Next 依旧会使用 glTF 的 KTX 2.0 和 下一代 PBR 材质等扩展。
KTX 2.0 是用来支持纹理数据的跨 GPU 传输、运行时压缩,减少内存、带宽等,以提升硬件效能,毕竟通过无人机或者卫星获取的图像的体积可不小。
下一代 PBR 召集了世界 PBR 专家来集思广益,将 glTF 的材质表现提升到一个新的高度。
6. 后续进度
从发文时间起,之后的几个月将完成规范的设计。
目前的进度有:
- 起草了 3D Tiles 与 glTF 相关的扩展项:
- 3D 元数据规范
- 3D Tiles 扩展:3DTILES_metadata
- glTF 扩展:EXT_mesh_features
- 3D Tiles 扩展:3DTILES_implicit_tiling
- 3D Tiles 扩展:3DTILES_bounding_volume_S2
- 3D Tiles 扩展:3DTILES_multipie_contents
- 3D Tiles 扩展:3DTILES_content_gltf
- 开发者相关的资源,pdf、示例数据、博客等;
- 在 [email protected] 以上的例子实现
- ...
7. 译者注
下一代的 3D Tiles 目前没有定名为 3D Tiles 2.0,而是暂时以扩展项的方式推进。
它解决了一部分 1.0 中的问题,例如把元数据从旧的瓦片文件中的 BatchTable、FeatureTable 拆分出来,便于数据库实现;拆出来元数据后,剩下的三维数据可以直接利用 glTF 格式,而 glTF 格式本身又是可以把纹理、几何分开存储的。总之,新设计的灵活性非常强。
除了数据方面的问题,还提出了新的空间切分算法 —— 隐式瓦片,这个扩展旨在提高前端瓦片剔除和渲染的性能。
总之,现在的状态就是“请洒潘江,各倾陆海云尔”。