【后端教程】Canny 边缘检测算法-python实现
摘要:Canny 边缘检测算法由计算机科学家 John F. Canny 于 1986 年提出的。其不仅提供了算法,还带来了一套边缘检测的理论,分阶段的解释如何实现边缘检测。Canny 检测算法包含下面几个阶段:
- 图像灰度化
- 高斯模糊处理
- 图像梯度、梯度幅值、梯度方向计算
- NMS(非极大值抑制)
- 双阈值的边界选取
1、图像灰度化
对于一张图片,当我们只关心其边界的时候,单通道的图片已经足够提供检测出边界的信息。所以我们可以将R、G、B的3通道图片乃至更高维的高光谱遥感图像进行灰度化。灰度化实际上是一种降维操作,它减少了冗余数据从而降低了计算开销。以下是对RGB图片灰度化的方法:
# 灰度化
def gray(self, img_path):
"""
计算公式:
Gray(i,j) = [R(i,j) + G(i,j) + B(i,j)] / 3
or :
Gray(i,j) = 0.299 * R(i,j) + 0.587 * G(i,j) + 0.114 * B(i,j)
"""
# 读取图片
img = plt.imread(img_path)
# BGR 转换成 RGB 格式
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 灰度化
img_gray = np.dot(img_rgb[...,:3], [0.299, 0.587, 0.114])
return img_gray
2、高斯模糊处理
高斯模糊实际上是对灰度化后的图像去噪。从数学的角度来看,图像的高斯模糊过程就是图像与正态分布做卷积。进行高斯滤波之前,需要先得到一个高斯滤波器(kernel)。如何得到一个高斯滤波器呢?其实就是将高斯函数离散化,将滤波器中对应的横纵坐标索引代入高斯函数,即可得到对应的值。不同尺寸的滤波器,得到的值也不同,下面是二维高斯函数与 (2k+1)x(2k+1) 滤波器的计算公式 :

[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-B0jnp8SG-1590057529271)(https://upload-images.jianshu.io/upload_images/23124486-1e96ecac16e27791.JPG?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
高斯滤波常用尺寸为 5x5,σ=1.4 的高斯滤波器。下面是 5x5 高斯滤波器的实现代码:
# 去除噪音 - 使用 5x5 的高斯滤波器
def smooth(self, img_gray):
# 生成高斯滤波器
"""
要生成一个 (2k+1)x(2k+1) 的高斯滤波器,滤波器的各个元素计算公式如下:
H[i, j] = (1/(2*pi*sigma**2))*exp(-1/2*sigma**2((i-k-1)**2 + (j-k-1)**2))
"""
sigma1 = sigma2 = 1.4
gau_sum = 0
gaussian = np.zeros([5, 5])
for i in range(5):
for j in range(5):
gaussian[i, j] = math.exp((-1/(2*sigma1*sigma2))*(np.square(i-3)
+ np.square(j-3)))/(2*math.pi*sigma1*sigma2)
gau_sum = gau_sum + gaussian[i, j]
# 归一化处理
gaussian = gaussian / gau_sum
# 高斯滤波
W, H = img_gray.shape
new_gray = np.zeros([W-5, H-5])
for i in range(W-5):
for j in range(H-5):
new_gray[i, j] = np.sum(img_gray[i:i+5, j:j+5] * gaussian)
return new_gray
3、图像梯度、梯度幅值、梯度方向计算
这个步骤的重要性不言而喻。直观感受上来讲我们知道一个图像上处于边界附近位置的像素值变化较大。而处于物体内部位置的像素值大多相近。这样我们可以计算当前像素与其附近像素的像素值的差值判断该像素处于物体内部还是边界。这个差值我们称为图像梯度。梯度幅值、梯度方向由图像梯度计算而来。
具体而言,我们用一阶导数来计算梯度:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-l3R3COZW-1590057529273)(https://upload-images.jianshu.io/upload_images/23124486-e8983605e386bd53.JPG?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
对于上式,实际操作时就是用当前像素的下一个像素减去当前像素。此时[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3cPT59x2-1590057529275)(https://upload-images.jianshu.io/upload_images/23124486-807b6b026ed32f2f.JPG?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
=1
梯度包含x方向的梯度与y方向的梯度。它们是两个向量。梯度幅值是这两个向量的向量和:
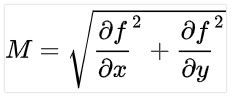
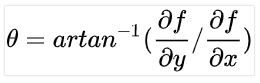
既然梯度幅值是一个向量,那么我们需要计算它的方向:
我们用如下代码实现:
# 计算梯度幅值
def gradients(self, new_gray):
"""
:type: image which after smooth
:rtype:
dx: gradient in the x direction
dy: gradient in the y direction
M: gradient magnitude
theta: gradient direction
"""
W, H = new_gray.shape
dx = np.zeros([W-1, H-1])
dy = np.zeros([W-1, H-1])
M = np.zeros([W-1, H-1])
theta = np.zeros([W-1, H-1])
for i in range(W-1):
for j in range(H-1):
dx[i, j] = new_gray[i+1, j] - new_gray[i, j]
dy[i, j] = new_gray[i, j+1] - new_gray[i, j]
# 图像梯度幅值作为图像强度值
M[i, j] = np.sqrt(np.square(dx[i, j]) + np.square(dy[i, j]))
# 计算 θ - artan(dx/dy)
theta[i, j] = math.atan(dx[i, j] / (dy[i, j] + 0.000000001))
return dx, dy, M, theta
4、NMS(非极大值抑制)
在计算得到的梯度幅值中我们实际上已经得到了图像的边界。如下:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-7NcvwqGE-1590057529282)(https://upload-images.jianshu.io/upload_images/23124486-fb9e18e29c3c98cd.JPG?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
[图片上传中…(image-d2bde0-1590057471856-4)]
理想情况下,最终得到的边缘应该是很细的。因此,需要执行非极大值抑制以使边缘变细。原理很简单:遍历梯度矩阵上的所有点,并保留边缘方向上具有极大值的像素。就像下面这幅图一样。图中黑色和灰色表示边界。我们通过NMS找出其中的局部最大值(也就是图中的黑色)而把其他位置(也就是图中的灰色)的值取0:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-PjXkgidN-1590057529284)(https://upload-images.jianshu.io/upload_images/23124486-13bd276ff27caaf1.JPG?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
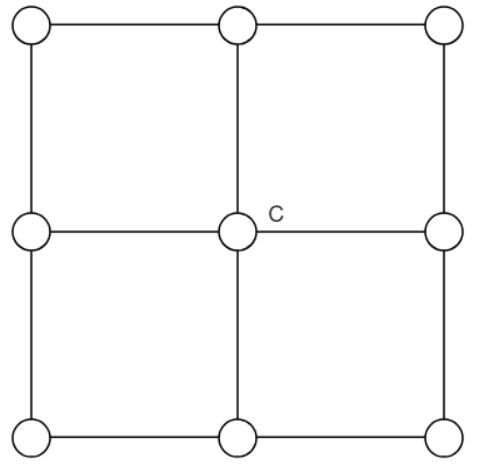
下面说说 NMS 的细节内容。NMS在八个领域:上,下,左,右,左上,左下,右上,右下上进行(当然,比较的时候不需要将该点与其它八个点比较。只需要将其与其梯度方向上的点比较即可。这个很好理解。因为我们只需要当前值在它所属的边缘上是局部最大值即可,而不需要它在其它边缘上也是局部最大)如下图所示,C 周围的 8 个点就是其附近的八个领域。
NMS 是要找出局部最大值,因此,需要将当前的像素的梯度,与其他方向进行比较。如下图所示,g1,g2,g3,g4 分别是 C 八个领域中的 4 个点,蓝线是 C 的梯度方向。如果 C 是局部最大值的话,C 点的梯度幅值就要大于梯度方向直线与 g1g2,g4g3 两个交点的梯度幅值,即大于点 dTemp1 和 dTemp2 的梯度幅值。上面提到这种方法无法达到最好的效果,因为 dTemp1 和 dTemp2 不是整像素,而是亚像素。亚像素的意思就是在两个物理像素之间还有像素。那么,亚像素的梯度幅值怎么求?可以使用线性插值的方法,计算 dTemp1 在 g1,g2 之间的权重,就可以得到其梯度幅值。计算公式如下:
weight = |gx| / |gy| or |gy| / |gx|
dTemp1 = weight*g1 + (1-weight)*g2
dTemp2 = weight*g3 + (1-weight)*g4
计算时分两种情况(都是比较当前像素与dtemp1与dtemp2的大小,大于这两个值则保留,小于其中任意一个则将其值取0):1)下面两幅图是 y 方向梯度值比较大的情况,即梯度方向靠近 y 轴。所以,g2 和 g4 在 C 的上下位置,此时 weight = |gy| / |gx| 。左边的图是 x,y 方向梯度符号相同的情况,右边是 x,y 方向梯度符号相反的情况。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UYJeZOdR-1590057529287)(https://upload-images.jianshu.io/upload_images/23124486-6bb3ba51330c3783.JPG?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
下面两幅图是 x 方向梯度值比较大的情况,即梯度方向靠近 x 轴。所以,g2 和 g4 在 C 的左右位置,此时 weight = |gy| / |gx| 。左边的图是 x,y 方向梯度符号相同的情况,右边是 x,y 方向梯度符号相反的情况。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-cgDskGu8-1590057529288)(https://upload-images.jianshu.io/upload_images/23124486-ef7f9bfb06f9c8ae.JPG?imageMogr2/auto-orient/strip%7CimageView2/2/w/1240)]
代码实现如下:
def NMS(self, M, dx, dy):
d = np.copy(M)
W, H = M.shape
NMS = np.copy(d)
NMS[0, :] = NMS[W-1, :] = NMS[:, 0] = NMS[:, H-1] = 0
for i in range(1, W-1):
for j in range(1, H-1):
# 如果当前梯度为0,该点就不是边缘点
if M[i, j] == 0:
NMS[i, j] = 0
else:
gradX = dx[i, j] # 当前点 x 方向导数
gradY = dy[i, j] # 当前点 y 方向导数
gradTemp = d[i, j] # 当前梯度点
# 如果 y 方向梯度值比较大,说明导数方向趋向于 y 分量
if np.abs(gradY) > np.abs(gradX):
weight = np.abs(gradX) / np.abs(gradY) # 权重
grad2 = d[i-1, j]
grad4 = d[i+1, j]
# 如果 x, y 方向导数符号一致
# 像素点位置关系
# g1 g2
# c
# g4 g3
if gradX * gradY > 0:
grad1 = d[i-1, j-1]
grad3 = d[i+1, j+1]
# 如果 x,y 方向导数符号相反
# 像素点位置关系
# g2 g1
# c
# g3 g4
else:
grad1 = d[i-1, j+1]
grad3 = d[i+1, j-1]
# 如果 x 方向梯度值比较大
else:
weight = np.abs(gradY) / np.abs(gradX)
grad2 = d[i, j-1]
grad4 = d[i, j+1]
# 如果 x, y 方向导数符号一致
# 像素点位置关系
# g3
# g2 c g4
# g1
if gradX * gradY > 0:
grad1 = d[i+1, j-1]
grad3 = d[i-1, j+1]
# 如果 x,y 方向导数符号相反
# 像素点位置关系
# g1
# g2 c g4
# g3
else:
grad1 = d[i-1, j-1]
grad3 = d[i+1, j+1]
# 利用 grad1-grad4 对梯度进行插值
gradTemp1 = weight * grad1 + (1 - weight) * grad2
gradTemp2 = weight * grad3 + (1 - weight) * grad4
# 当前像素的梯度是局部的最大值,可能是边缘点
if gradTemp >= gradTemp1 and gradTemp >= gradTemp2:
NMS[i, j] = gradTemp
else:
# 不可能是边缘点
NMS[i, j] = 0
return NMS
6、双阈值的边界选取
这个阶段决定哪些边缘是真正的边缘,哪些边缘不是真正的边缘。为此,需要设置两个阈值,minVal 和 maxVal。梯度大于 maxVal 的任何边缘肯定是真边缘,而 minVal 以下的边缘肯定是非边缘,因此被丢弃。位于这两个阈值之间的边缘会基于其连通性而分类为边缘或非边缘,如果它们连接到“可靠边缘”像素,则它们被视为边缘的一部分。否则,也会被丢弃。代码如下所示:
def double_threshold(self, NMS):
W, H = NMS.shape
DT = np.zeros([W, H])
# 定义高低阈值
TL = 0.1 * np.max(NMS)
TH = 0.3 * np.max(NMS)
for i in range(1, W-1):
for j in range(1, H-1):
# 双阈值选取
if (NMS[i, j] < TL):
DT[i, j] = 0
elif (NMS[i, j] > TH):
DT[i, j] = 1
# 连接
elif (NMS[i-1, j-1:j+1] < TH).any() or (NMS[i+1, j-1:j+1].any()
or (NMS[i, [j-1, j+1]] < TH).any()):
DT[i, j] = 1
return DT
服务推荐
- 蜻蜓代理
- ip代理服务器
- 企业级代理ip
- 微信域名检测
- 微信域名拦截检测