电子设计竞赛(4)-常用的两种PID算法
公众号关注 “大鱼机器人”
设为 “星标”,重磅干货,第一时间送达!
1. 什么是PID
PID 控制器以各种形式使用超过了 1 世纪,广泛应用在机械设备、气动设备 和电子设备.在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构 成 PID 基本要素。每一项完成不同任务,对系统功能产生不同的影响。
它的结构简单,参数易 于调整,是控制系统中经常采用的控制算法。
PID:比例单元(P)、积分单元(I)和微分单元(D)组成
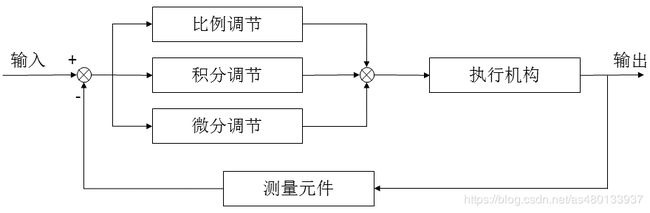 ▲ PID控制框图
▲ PID控制框图
PID控制公式:

其中:u(t)为控制器输出的控制量;(输出)
e(t)为偏差信号,它等于给定量与输出量之差;(输入)
KP 为比例系数;(对应参数 P)
TI 为积分时间常数;(对应参数I)
TD 为微分时间常数。(对应参数 D)
数字 PID 控制算法因时间离散化不同,通常分为位置式 PID 控制算法和增量式 PID 控制算法。
2. 位置式 PID 算法

e(k): 用户设定的值(目标值) - 控制对象的当前的状态值
比例P : e(k)
积分I : ∑e(i) 误差的累加(包括e(k))
微分D : e(k) - e(k-1) 这次误差-上次误差
也就是位置式PID是当前系统的实际位置,与你想要达到的预期位置的偏差,进行PID控制。
因为有误差积分 ∑e(i),一直累加,也就是当前的输出u(k)与过去的所有状态都有关系,用到了误差的累加值;(误差e会有误差累加),输出的u(k)对应的是执行机构的实际位置,,一旦控制输出出错(控制对象的当前的状态值出现问题 ),u(k)的大幅变化会引起系统的大幅变化
并且位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,一旦误差开始反向变化,系统需要一定时间从饱和区退出,所以在u(k)达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅
所以在使用位置式PID时,一般我们直接使用PD控制
而位置式 PID 适用于执行机构不带积分部件的对象,如舵机和平衡小车的直立和温控系统的控制
根据公式结合代码可以很好理解
//pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
typedef struct PID
{
float kp;
float ki;
float kd;
float ek; //当前误差
float ek_1; //上一次误差
float ek_sum; //误差总和
float limit; //限幅
}PID;
static PID pid;
void PID_Init()
{
pid.kp = 0.1;
pid.ki = 0.2;
pid.kd = 0.3;
pid.limit = 1000;
pid.ek = 0;
pid.ek_1 = 0;
pid.ek_sum = 0;
}
// 位置式PID控制
float PID_Postion(int Encoder,int Target)
{
float pwm = 0;
pid.ek = Target - Encoder; // 计算当前误差
pid.ek_sum += pid.ek; //求出偏差的积分
pwm = pid.kp*pid.ek + pid.ki*pid.ek_sum +
pid.kd*(pid.ek - pid.ek_1); //位置式PID控制器
pid.ek_1 = pid.ek; //保存上一次偏差
if(pwm > pid.limit)
{
pwm = pid.limit;
}
else if(pwm < -pid.limit)
{
pwm = -pid.limit;
}
return pwm;
}
有不明所以然的朋友会问,在将PID用于电机控制时,我这个PID的输入参数是编码器的数值、目标位置,我的输出PWM是个什么东西呢?
这个PWM可以是-1---+1的占空比,也可以是比较寄存器的数值,例如ARR是3000,PWM这个可以是1500,代表PWM占空比50%,那有的会问,例如我的encoder是1000,target是2000,那么pid.ek = 1000,按照pid.kp = 10计算,那么pid.kp*pid.ek = 10000,也就是说这个输出pwm如果代表占空比-1--+1的话,远远大于它的范围,那是不是这个计算或者公式有问题呢?
或者是不是pwm代表的意义不对呢?其实是没有关系的,因为按照计算10000大于1,PWM=1,那么完全按照占空比1运行,等到encoder=target时,pwm=0,电机就不再运动了,到达了目标位置;
但是这里要提醒大家,encoder与target代表编码器数值,二者的差值肯定是整数,乘以pid.kp=10之后,肯定大于1,所以PWM始终是100%占空比,这样有可能时钟无法找到目标位置,所以pid.kp=10这个参数设置就不合理,比如设置pid.kp=0.001,则encoder与target差值如果在1000以内,PWM就可能在-1--+1之间,这样才能真正的起到调节作用,所以kp的值并不是大家随意乱设,要根据控制量的实际情况、输出值的实际意义,设定参数,脱离实际意义的盲目瞎设参数反而适得其反。
3. 增量式PID
比例P : e(k)-e(k-1) 当前误差 - 上次误差
积分I : e(i) 当前误差
微分D : e(k) - 2e(k-1)+e(k-2) 当前误差 - 2*上次误差 + 上上次误差
增量式PID根据公式可以很好地看出,一旦确定了 KP、TI 、TD,只要使用前后三次测量值的偏差, 即可由公式求出控制增量。
而得出的控制量▲u(k)对应的是近几次位置误差的增量,而不是对应与实际位置的偏差,没有误差累加。
也就是说,增量式PID中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果,并且在系统发生问题时,增量式不会严重影响系统的工作。
总结:
增量型 PID,是对位置型 PID 取增量,这时控制器输出的是相邻两次采样时刻所计算的位置值
之差,得到的结果是增量,即在上一次的控制量的基础上需要增加(负值意味减少)控制量。
代码实现效果如下:
//根据增量式离散PID公式
//pwm+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
//e(k)代表本次偏差
//e(k-1)代表上一次的偏差 以此类推
//e(k-2)代表上上次的偏差
//pwm代表增量输出
typedef struct PID
{
float kp;
float ki;
float kd;
float ek; //当前误差
float ek_1; //上一次误差
float ek_2; //上上一次误差
float limit; //限幅
}PID;
static PID pid;
void PID_Init()
{
pid.kp = 0.1;
pid.ki = 0.2;
pid.kd = 0.3;
pid.limit = 1000;
pid.ek = 0;
pid.ek_1 = 0;
pid.ek_2 = 0;
}
// 增量式PID控制
float PID_Increase(int Encoder,int Target)
{
float pwm = 0;
pid.ek = Target - Encoder; // 计算当前误差
pid.ek_sum += pid.ek; //求出偏差的积分
pwm = pid.kp*(pid.ek - pid.ek_1) + pid.ki*pid.ek +
pid.kd*(pid.ek - 2*pid.ek_1 + pid.ek_2); //增量式PID控制器
pid.ek_1 = pid.ek; //保存上一次偏差
pid.ek_2 = pid.ek_1; //保存上上一次的偏差
if(pwm > pid.limit)
{
pwm = pid.limit;
}
else if(pwm < -pid.limit)
{
pwm = -pid.limit;
}
return pwm;
}
4. 增量式与位置式区别
1 增量式算法不需要做累加,控制量增量的确定仅与最近几次偏差采样值有关,计算误差对控制 量计算的影响较小。而位置式算法要用到过去偏差的累加值,容易产生较大的累加误差。
2 增量式算法得出的是控制量的增量,例如在阀门控制中,只输出阀门开度的变化部分,误动作 影响小,必要时还可通过逻辑判断限制或禁止本次输出,不会严重影响系统的工作。而位置式的输出直接对应对象的输出,因此对系统影响较大。
3 增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。
4 在进行PID控制时,位置式PID需要有积分限幅和输出限幅,而增量式PID只需输出限幅
位置式PID优缺点:
优点:
①位置式PID是一种非递推式算法,可直接控制执行机构(如平衡小车),u(k)的值和执行机构的实际位置(如小车当前角度)是一一对应的,因此在执行机构不带积分部件的对象中可以很好应用
缺点:
①每次输出均与过去的状态有关,计算时要对e(k)进行累加,运算工作量大。
增量式PID优缺点:
优点:
①误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
②手动/自动切换时冲击小,便于实现无扰动切换。当计算机故障时,仍能保持原值。
③算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关。
缺点:
①积分截断效应大,有稳态误差;
②溢出的影响大。有的被控对象用增量式则不太好;
5. 如何进行参数整定?
首先我们需要明确我们的控制目标,也就是满足控制系统的 3 个要求:
稳定性
快速性
准确性
具体的评估指标有最大超调量、上升时间、静差等。
最大超调量是响应曲线的最大峰值与稳态值的差,是评估系统稳定性的一个重要指标;上升时间是指响应曲线从原始工作状态出发,第一次到达输出稳态值所需的时间,是评估系统快速性的一个重要指标;静差是被控量的稳定值与给定值之差,一般用于衡量系统的准确性,具体可以参考前文的讲解。
在实践生产工程中,不同的控制系统对控制器效果的要求不一样。比如平衡车、倒立摆对系统的快速性要求很高,响应太慢会导致系统失控。智能家居里面的门窗自动开合系统,对快速性要求就不高,但是对稳定性和准确性的要求就很高,所以需要严格控制系统的超调量和静差。所以 PID 参数在不同的控制系统中是不一样的。只要我们理解了每个 PID 参数的作用,我们就可以应对工程中的各种项目的 PID 参数整定了。
一般而言,一个控制系统的控制难度,一般取决于系统的转动惯量和对响应速度的要求等。转动惯量越小、对响应速度要求越低,PID 参数就越不敏感。比如现在我们控制电机转 90°,需要严格控制超调量、和静差。但是对响应速度无要求。因为电机处于轻载的情况下,转动惯量很小,这是一个很容易完成的工作。根据上面的理论分析和实践,因为响应速度无要求,一般 P 应该给小一点,然后加大系统的阻尼防止超调,也就是 D 参数尽量大,另外因为 P 值较小,应该加入I 控制减小静差。
原文链接:https://blog.csdn.net/u014453443/java/article/details/100573722
-END-
关于比赛的帖子,之前写过很多篇:
「第一弹」电子设计大赛应该准备什么?
「第一篇」大学生电子设计竞赛,等你来提问。
「第二篇」全国一等奖,经验帖。
「第三篇」电赛,这些你必须知道的比赛细节,文末附上近十年电赛题目下载
「第四篇」电赛控制题可以准备一些什么?
「第五篇」全国电子设计竞赛-电源题设计方案总结
「第六篇」对于电赛,我们应该看重什么?
电子设计竞赛电源题(1)-电源题简介
电子设计竞赛电源题(2)-检波与采样
电子设计竞赛(三)-SPWM与PID
也有一些大神的经验贴,其实不乏国奖获得者:
全国一等奖,他的学习之路。
从0开始,三个月,获全国一等奖。
奖状是怎么炼成的—我的电赛狂魔之旅
全国一等奖的获得者,如今去当了人民教师。
也有一些关于比赛项目的文章:
参加智能车大赛还是电赛?在做电磁炮中我找到了答案
2019年电赛综合测评题详解
「权威发布」2019年电赛最全各类题目细节问题解答汇总
奖状是怎么炼成的—我的电赛狂魔之旅
【大学生电子设计竞赛分享经验贴】风力循迹小车
去年还做过几期猜题的文章,貌似有点接近了,今年还可以继续给大家猜猜。
「猜题第一篇」2019年大学生电子设计竞赛
「重磅猜题之第二篇」2019年大学生电子设计竞赛
最 后 若觉得文章不错,转发分享,也是我们继续更新的动力。5T资源大放送!包括但不限于:C/C++,Linux,Python,Java,PHP,人工智能,PCB、FPGA、DSP、labview、单片机、等等!在公众号内回复「更多资源」,即可免费获取,期待你的关注~长按识别图中二维码关注