数据结构 线段树--权值线段树 详解
| | Powered By HeartFireY | Weighted Segment Tree |
一、权值线段树 简介
1.线段树
线段树是一种用于维护区间信息的高效数据结构,可以在 O ( log N ) O(\log N) O(logN) 的时间复杂度内实现单点修改、区间修改、区间查询(区间求和,求区间最大值,求区间最小值)等操作。
线段树维护的信息必须满足可加性,即能以可以接受的速度合并信息和修改信息,包括在使用Lazy标记时,标记也要满足可加性
具体有关线段树的的讲解请参考博客:线段树 详解与模板
2.权值线段树
权值线段树是一种建立在基本线段树之上的数据结构。因此它的基本原理仍是基于对区间的维护操作。但与线段树相区分的点是:权值线段树维护的信息与基本线段树有所差异:
- 基本线段树中每个系欸但用来维护一段区间的最大值或总和等;
- 权值线段树每个结点维护的是一个区间的数出现的次数。
实际上,权值线段树可以看作是一个桶,桶的操作它都支持,并且能够以更快的方式去完成。
根据权值线段树的性质,我们可以知道其主要用途:
权值线段树一般用于维护一段区间的数出现的次数,从它的定义来看,它可以快速计算出一段区间的数的出现次数。
在实际应用中,我们使用权值线段树查询区间第 K K K大的值。
二、权值线段树的基本原理与操作
1.权值线段树维护信息的原理
基础线段树和权值线段树的一个较大的区别点在于:(此处特指使用数组储存树结构)基础线段树根据初始的一个序列建立树结构,具有单独的建树操作;而权值线段树不需要进行建树操作,初始状态下默认建立一棵所有点权为 0 0 0的空树,对于每个元素,在遍历的时候相应的结点做自增运算。换而言之:
- 权值线段是一棵已经建好的线段树,储存树结构的下标范围根据区间最大值最小值确定(一般开大空间即可);
- 初始状态下所有的点权均为 0 0 0;
- 执行插入元素的操作时,会导致插入值 v v v对应的 A [ v ] + + A[v]++ A[v]++,同时引发单点更新操作。
- 可以从上述描述中得到基本推论:向空的权值线段树中插入一个无序序列,则插入完成后在树上无法再得到原序列的遍历,但能通过遍历得到有序序列(无序序列变有序序列)
我们可以通过结构对比线段树与权值线段树的区别,以此理解原理。
我们给定序列 { 1 , 2 , 2 , 3 , 3 , 3 , 4 , 4 , 4 , 4 } \{1, 2, 2, 3, 3, 3, 4, 4, 4, 4 \} {1,2,2,3,3,3,4,4,4,4},以该序列为例建立两种线段树。
首先,序列长度为 10 10 10,建立基础区间和查询线段树,结构图如下:
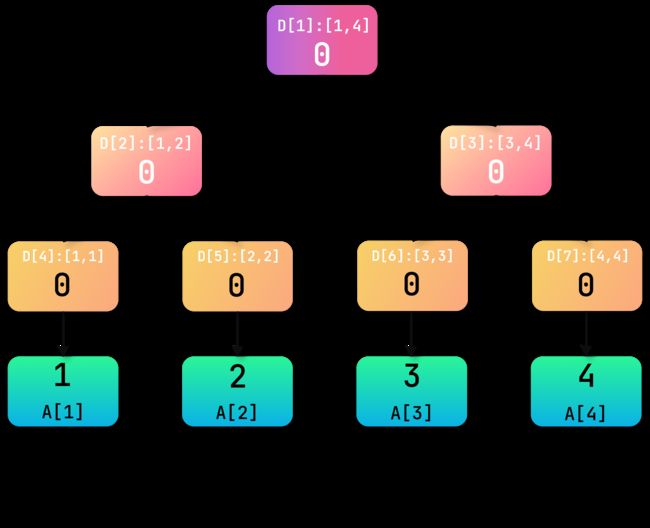
对应具体的细节不再阐述。我们继续建立权值线段树:首先给出一棵空树:
(注:为演示方便,A数组下标做+1操作,树上的范围也对应变化,这里懒得改了~)
然后按照序列顺序插入元素:

解释:
A [ 1 ] = 1 A[1] = 1 A[1]=1:原序列中存在值为 1 1 1的元素 1 1 1个
A [ 2 ] = 1 A[2] = 1 A[2]=1:原序列中存在值为 2 2 2的元素 2 2 2个
A [ 3 ] = 1 A[3] = 1 A[3]=1:原序列中存在值为 3 3 3的元素 3 3 3个
A [ 4 ] = 1 A[4] = 1 A[4]=1:原序列中存在值为 4 4 4的元素 4 4 4个
D [ k ] D[k] D[k]:一定区间内所含元素的个数
我们继续探究查找第 K K K大元素的方法:
由于权值线段树每个节点记录了某段区间内包含的元素个数,且元素在叶子节点构成的序列中是有序的:
- 对于整列数中第 K K K大/小的值,我们从根节点开始判断(这里按第 K K K大为例),如果 K K K比右儿子大,就说明第 K K K大的数在左儿子所表示的值域中。然后, K K K要减去右儿子。(这是因为继续递归下去的时候,正确答案,整个区间的第 K K K大已经不再是左儿子表示区间的第 K K K大了)。如此递归到叶子节点时即为答案。
- 整棵线段树的根节点就表示整个值域有几个数。
我们很容易看出:在权值线段树中,采用元素到下标数组映射的方式进行插入。这样会导致一个问题:在数据离散程度较大的情况下,空间的利用效率比较低。因此我们对于线段树所开空间不足时,常采用离散化的方式进行解决。
| | 此处的前导知识:离散化(具体的参见离散化的讲解) |
2.权值线段树的基本操作与实现
①.查询第 K K K大/小元素
假设 K = 5 K = 5 K=5,那么查询过程是怎样的?
首先我们从根节点出发,由于要查询第 K K K大,是相对于终点而言的,因此从右子结点开始判断:

当前节点右子树包含 4 4 4个元素,所以应该向左子树遍历,注意:此时应该减去右子树的 4 4 4个元素!

寻找第 K K K小的操作与上方类似,区别在于相对于起点OR终点而言(遍历时对左右子树的判断顺序)。
再次回顾整个步骤:对于整列数中第 K K K大/小的值,我们从根节点开始判断(这里按第 K K K大为例),如果 K K K比右儿子大,就说明第 K K K大的数在左子树中。然后, K K K要减去右子节点的值。(这是因为继续递归下去的时候,正确答案,整个区间的第 K K K大已经不再是左子树表示区间的第 K K K大了)。如此递归到叶子节点时即为答案
根据以上分析步骤,我们可以写出查询第 K K K大和第 K K K小的函数:
int query_kth(int pos, int l, int r, int k){
if(l == r) return l;
int mid = (l + r) >> 1, right = tree[pos << 1 | 1];
if(k <= right) return query(pos << 1 | 1, mid + 1, r, k);
else return query(pos << 1, l, mid, k - right);
}
int query_kth(int pos, int l, int r, int k){
if(l == r) return l;
int mid = (l + r) >> 1, left = tree[pos << 1];
if(k <= left) return query(pos << 1, l, mid, k - left);
else return query(pos << 1 | 1, mid + 1, r, k);
}
②.单点更新操作
类似基础线段树,递归到叶子节点 + 1 +1 +1然后回溯
void add(int l, int r, int v, int x){
if (l == r) tree[v]++;
else{
int mid = (l + r) >> 1;
if (x <= mid) add(l, mid, v << 1, x);
else add(mid + 1, r, v << 1 | 1, x);
tree[v] = tree[v << 1] + tree[v << 1 | 1];
}
}
③.查询某个数出现的个数
树上二分查找的思想,代码如下:
int find(int l, int r, int v, int x){
if (l == r) return tree[v];
else{
int mid = (l + r) >> 1;
if (x <= mid) return find(l, mid, v << 1, x);
else return find(mid + 1, r, v << 1 | 1, x);
}
}
④.查询一段区间的数出现的次数
int find(int l, int r, int v, int x, int y){
if (l == x && r == y) return tree[v];
else{
int mid = (l + r) >> 1;
if (y <= mid) return find(l, mid, v << 1, x, y);
else if (x > mid) return find(mid + 1, r, v << 1 | 1, x, y);
else return find(l, mid, v << 1, x, mid) + find(mid + 1, r, v << 1 | 1, mid + 1, y);
}
}
3.区间离散化
如前所述,在将元素个数映射到叶子节点的过程中,离散程度较大时会导致极低的空间利用效率。对本种数据结构,我们关心的仅仅是元素之间的大小关系,因此可以采用离散化的方法对空间进行优化。
离散化的知识在此不展开赘述,直接采用C++STL算法
int get_discretization(){
for (int i = 1; i <= n; ++i) a[i] = read(), b[i] = a[i]; //读入数据
sort(b + 1, b + n + 1);
int len = unique(b + 1, b + n + 1) - b - 1;
for (int i = 1; i <= n; ++i){
int pos = lower_bound(b + 1, b + len + 1, a[i]) - b;
a[i] = pos;
} //离散化
}