一、前言
关于高通OTP编程的知识,网上少得可怜,官方文档又没有那么清晰,于是就来一篇干货吧!
OTP编程完全指南分上、下2篇。
上:主要讲OTP的知识和调试流程。
下:主要讲OTP的源码。
Qcom-高通OTP编程调试指南-上
Qcom-高通OTP编程调试指南-下
本文知识点:
- 1.OTP的基本概念
- 2.OTP的作用
- 3.OTP的调试流程
二、知识点
1.OTP的基本概念(是什么)
OTP(One Time Programmable)意思是一次性可编程,程序或者数据烧入【存储器】后,将不可再次更改和清除。
OTP烧录的数据类型
一般包括:
- AF:自动对焦校准数据
- AWB:白平衡校准数据
- LSC:镜头阴影校准 (Lens Shading Calibration)
- Moudle Info:模组信息,包含模组的生产年日月,模组ID等

以AF为例子:

vendor厂烧录的AF数据:
Page:3,Addr:0x01D0,Data:0x04
Page:3,Addr:0x01D8,Data:0x01
Page:3,Addr:0x01E0,Data:0xBE
Page:3,Addr:0x01E8,Data:0x54
Page:3,Addr:0x01F0,Data:0x15
Page:3,Addr:0x01F8,Data:0x00
OTP存储器的类型
按照调试的经验,目前主流的有2种:
1.OTP数据烧录在sensor的寄存器中。
这种方案省钱,不需要额外的存储器件,但是存储空间小,如果需要烧录的数据量过大,就不适用。OTP数据烧录在EEPROM 中:
EEPROM(Electrically Erasable Programmable read only memory)是指带电可擦可编程只读存储器,
是一种掉电后数据不丢失的存储芯片。
该方案优势是存储空间大,如果数据量过多,就需要这种方案,缺点是多一个独立的EEPROM存储器件,
花点钱(5毛钱左右)。
2.OTP的作用(为什么)
OTP是用来给camera sensor做calibration(校准)用的。
因为模组生产出来会有很大的差异性,为了保证效果一致性,
模组厂会挑选一部分模组作为golden,然后将其他模组的相应参数校准到和这些golden一样,
(golden不是最好的模组,也不是最差的模组,而是各方面最平均的模组)。
3.OTP调试流程(怎么做)
调试平台:8909(较为低端)
PS:在高通源码的OTP指的就是EEPROM驱动。

例子一:以OV5675为例子(数据烧录在Camera Sensor中)
3.1 OTP调试准备工作
- 从datasheet获取相关信息
OTP Datasheet(OV5675 Calibration and OTP Programming Guid)
Camera sensor Datasheet(sensor_OV05675-GA4A.pdf)
a.弄明白上电时序(这个和camera上电时序是一致的)
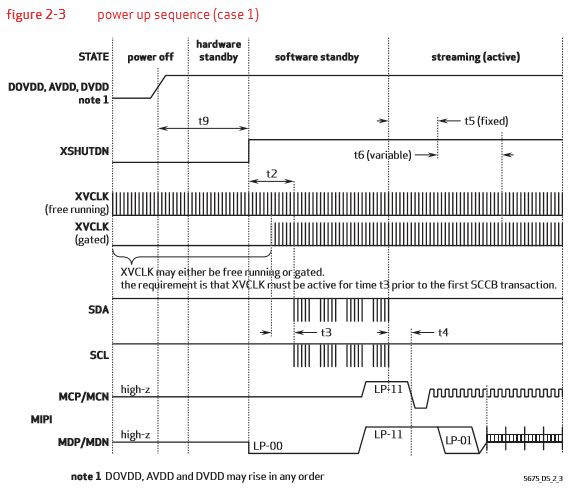 上电时序
上电时序
b.获得slave address

硬件上我们这个pin脚是拉高的,所以I2C addr = 0x20
c.弄清楚读写规则


d.其他
1. 供电:cam_vio-supply = <&pm8916_l10>;
2. clock:
clocks = <&clock_gcc clk_mclk0_clk_src>,<&clock_gcc clk_gcc_camss_mclk0_clk>;
clock-names = "cam_src_clk", "cam_clk";
3.GPIO pins
gpios =
<&msm_gpio 26 0>,
<&msm_gpio 28 0>,
<&msm_gpio 33 0>;
3.2 配置 DTSI文件
EEPROM数据在设备启动时读取。需要将内存映射转换为dtsi中的对应的属性节点。
其中必须指定调节器(供电)、时钟信号、电源启动序列、设备地址和读取序列。
路径:kernel/arch/arm/boot/dts/qcom/msm8909-pm8916-camera-sensor-i18.dtsi
eeprom1: qcom,eeprom@20 {
cell-index = <1>;/*分配给eeprom subdev,唯一即可*/
reg = <0x20>;/*注册地址*/
qcom,eeprom-name = "ov5675_back";/*eeprom驱动名称,必须与驱动力的名称一致*/
compatible = "qcom,eeprom";/*匹配节点,都是这个值*/
qcom,slave-addr = <0x20>;/*i2c地址*/
qcom,cci-master = <0>;/*默认都为0即可*/
qcom,num-blocks = <10>;/*下面配置的page个数*/
/*读写规则*/
qcom,page0 = <1 0x0100 2 0x01 1 10>;/*steam on */
qcom,pageen0 = <0 0x0 0 0x0 0 0>;
qcom,poll0 = <0 0x0 0 0x0 0 0>;
qcom,mem0 = <0 0x0 2 0 1 1>;
/*初始化操作*/
qcom,page1 = <1 0x5001 2 0x02 1 1>;/*往0x5001写0x02:OTP enable*/
qcom,pageen1 = <0 0x0 0 0x0 0 0>;
qcom,poll1 = <0 0x0 0 0x0 0 0>;
qcom,mem1 = <0 0x5001 2 0 1 1>;
qcom,page2 = <1 0x3d84 2 0xc0 1 1>;/*往0x3d84写入0xc0:Enable partial OTP write */
qcom,pageen2 = <0 0x0 2 0x0 0 0>;
qcom,poll2 = <0 0x0 2 0x0 0 0>;
qcom,mem2 = <0 0x0 2 0 0 0>;
qcom,page3 = <1 0x3d88 2 0x70 1 1>;/*往0x3d88写入0x70:start address 高8位地址*/
qcom,pageen3 = <0 0x0 2 0x0 1 1>;
qcom,poll3 = <0 0x0 2 0x0 0 0>;
qcom,mem3 = <0 0x0 2 0 0 0>;
qcom,page4 = <1 0x3d89 2 0x10 1 1>;/*往0x3d88写入0x10:start address 低8位地址*/
qcom,pageen4 = <0 0x0 2 0x0 1 1>;
qcom,poll4 = <0 0x0 2 0x0 0 0>;
qcom,mem4 = <0 0x0 2 0 0 0>;
qcom,page5 = <1 0x3d8a 2 0x72 1 1>;/*往0x3d8a写入0x72:end address 高8位地址*/
qcom,pageen5 = <0 0x0 2 0x0 1 1>;
qcom,poll5 = <0 0x0 2 0x0 0 0>;
qcom,mem5 = <0 0x0 2 0 0 0>;
qcom,page6 = <1 0x3d8b 2 0x29 1 1>;/*往0x3d8b写入0x29:end address 低8位地址*/
qcom,pageen6 = <0 0x0 2 0x0 1 1>;
qcom,poll6 = <0 0x0 2 0x0 0 0>;
qcom,mem6 = <0 0x0 2 0 0 0>;
qcom,page7 = <1 0x3d81 2 0x01 1 10>;/*往0x3d81写入0x01:把OTP数据加载到buffer中 */
qcom,pageen7 = <0 0x0 0 0x0 0 0>;
qcom,poll7 = <0 0x0 0 0x0 0 0>;
qcom,mem7 = <256 0x7010 2 0 1 1>;/*从0x7010开始读取256个数据*/
qcom,page8 = <1 0x5001 2 0x0a 1 1>;/*往0x5001写0x0a:OTP disable*/
qcom,pageen8 = <0 0x0 0 0x0 0 0>;
qcom,poll8 = <0 0x0 0 0x0 0 0>;
qcom,mem8 = <0 0x0 2 0 1 1>;
qcom,page9 = <1 0x0100 2 0x00 1 10>;/*steam off*/
qcom,pageen9 = <0 0x0 0 0x0 0 0>;
qcom,poll9 = <0 0x0 0 0x0 0 0>;
qcom,mem9 = <0 0x0 2 0 1 1>;
cam_vio-supply = <&pm8916_l10>;/*供电相关:和camera一致即可*/
qcom,cam-vreg-name = "cam_vio";;/*硬件上只需IO供电,其他AVDD和DVDD都会被IO拉起来*/
qcom,cam-vreg-type = <0>;
qcom,cam-vreg-min-voltage = <1800000>;
qcom,cam-vreg-max-voltage = <2800000>;
qcom,cam-vreg-op-mode = <80000>;
pinctrl-names = "cam_default", "cam_suspend";
pinctrl-0 = <&cam_sensor_mclk1_default &cam_sensor_front_default>;
pinctrl-1 = <&cam_sensor_mclk1_sleep &cam_sensor_front_sleep>;
gpios = <&msm_gpio 26 0>,/*GPIO相关:和camera一致即可*/
<&msm_gpio 28 0>,
<&msm_gpio 33 0>;
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-req-tbl-num = <0 1 2>;
qcom,gpio-req-tbl-flags = <1 0 0>;
qcom,gpio-req-tbl-label = "CAMIF_MCLK",
"CAM_RESET1",
"CAM_STANDBY";
qcom,cam-power-seq-type =/*eeprom的上电时序:和camera sensor的一致*/
"sensor_vreg","sensor_gpio", "sensor_gpio","sensor_clk";
qcom,cam-power-seq-val =
"cam_vio",
"sensor_gpio_standby",
"sensor_gpio_reset",
"sensor_cam_mclk";
qcom,cam-power-seq-cfg-val = <1 1 1 24000000>;
qcom,cam-power-seq-delay = <10 10 10 5>;
clocks = <&clock_gcc clk_mclk0_clk_src>,/*clock:和camera一致即可*/
<&clock_gcc clk_gcc_camss_mclk0_clk>;
clock-names = "cam_src_clk", "cam_clk";
};
qcom,camera@1 {//在camera中应用eeprom1
···
qcom,eeprom-src = <&eeprom1>;
···
}
属性节点含义
- cell-index = <1>;
该节点用于eeprom subdev注册subdev_id,唯一即可! - reg = <0x20>
注册地址:高端平台要求这个地址唯一即可,低端平台借助这个地址和i2c通信,
保险起见,统一设置为i2c地址。 - qcom,eeprom-name = "ov5675_back";
这个名称必须和eeprom驱动的名称一致,例如
vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/
modules/sensors/sensor_libs/ov5675_back/ov5675_back_lib.c
static sensor_lib_t sensor_lib_ptr = {
/* sensor eeprom name */
.eeprom_name = "ov5675_back",
}
- qcom,slave-addr = <0x20>;
I2C 设备地址 - cam_vio-supply = <&pm8916_l10>;
供电电源 - qcom,cam-power-seq-type
上电时序
上电的类型
qcom,cam-power-seq-type = "sensor_vreg","sensor_gpio", "sensor_gpio","sensor_clk";
上电类型的对应的val
qcom,cam-power-seq-val = "cam_vio","sensor_gpio_standby","sensor_gpio_reset","sensor_cam_mclk";
上电时序的值:除了clock配置成相应的值,其他全配置1
qcom,cam-power-seq-cfg-val = <1 1 1 24000000>;
上电延迟时间
qcom,cam-power-seq-delay = <10 10 10 5>;
事实上,这个上电时序跟Camera Sensor的上电时序是一致的!举个例子

- qcom,page0 =
= <有效值 地址 地址类型 数据 数据类型 延迟>
地址类型:1代表1 byte ,2代表2byte = 1 word
数据类型:1代表1 byte ,2代表2byte = 1 word
读写规则
qcom,page7 = <1 0x3d81 2 0x01 1 10>;/*往0x3d81写入0x01:把OTP数据加载到buffer中 */
qcom,pageen7 = <0 0x0 0 0x0 0 0>;
qcom,poll7 = <0 0x0 0 0x0 0 0>;
qcom,mem7 = <256 0x7010 2 0 1 1>;/*从0x7010开始读取256个数据*/

到此,dtsi的配置就完成了!!!
3.3 软件驱动配置
1.添加新的EEPROM驱动
vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/
sensors/eeprom_libs/ov5675_back
* ov5675_back.c
* Android.mk
任何新
所有未在此 EEPROM 驱动程 序中定义的函数必须设置为 NULL。

.get_calibration_items() – 此函数应返回 EEPROM 模块所支持的配置。
基于 EEPROM 所支持的配置,将指定标记设置为 TRUE 或 FALSE。

- Is_insensor – 如果传感器模块本身支持 EEPROM 配置,则将此标记设置为 TRUE。
外部 EEPROM 均不可用。 - Is_afc – 如果支持 AF 校准,将此标记设置为 TRUE。
- Is_wbc – 如果支持白平衡校准,将此标记设置为 TRUE。
- Is_lsc – 如果支持镜头阴影校准,将此标记设置为 TRUE。
- Is_dpc – 如果支持缺陷像素校正,将此标记设置为 TRUE
.format_calibration_data() – 此函数用于格式化可写入 eeprom/ 传感器模块的数据
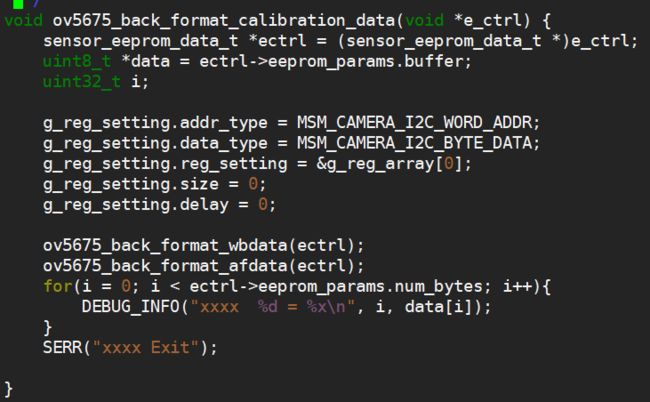
OTP数据应用
- .do_af_calibration() – 此函数用于处理所有与 AF 相关的校准操作,
如格式化数据和将 其写入 EEPROM 以执行 AF 校准。 - .do_wbc_calibration() – 此函数用于处理所有与白平衡相关的校准操作,
如格式化数据 和将其写入 EEPROM 以执行白平衡校准。 - .do_lsc_calibration() – 此函数用于处理所有与镜头阴影校正相关的校准操作,
如格式化 数据和将其写入 EEPROM 以执行镜头阴影校准。 - .do_dpc_calibration() – 此函数用于处理所有与缺陷像素校正相关的校准操作,
如格式化 数据和将其写入 EEPROM 以执行缺陷像素校正
例子二:以独立EEPROM为例子(数据烧录在独立的EEPROM中)
步骤和例子1是一样的,关键在于dtsi的配置
eeprom0: qcom,eeprom@a0 {
cell-index = <0>;
reg = <0xa0>;
qcom,eeprom-name = "gc8034_otp";
compatible = "qcom,eeprom";
qcom,slave-addr = <0xa0>;
qcom,cci-master = <0>;
qcom,num-blocks = <1>;
qcom,page0 = <0 0 0 0 0 0>;
qcom,pageen0 = <0 0x0 0 0x0 0 0>;
qcom,poll0 = <0 0x0 0 0x0 0 0>;
qcom,mem0 = <1813 0x0000 2 0 1 1>;
cam_vio-supply = <&pm8916_l10>;
qcom,cam-vreg-name = "cam_vio";
qcom,cam-vreg-type = <0>;
qcom,cam-vreg-min-voltage = <1800000>;
qcom,cam-vreg-max-voltage = <2800000>;
qcom,cam-vreg-op-mode = <80000>;
qcom,cam-power-seq-type = "sensor_vreg";
qcom,cam-power-seq-val ="cam_vio";
qcom,cam-power-seq-cfg-val = <1>;
qcom,cam-power-seq-delay = <10>;
};
最关键的地方就是reg = <0xa0>;
这里要配置成I2C地址,读取数组的时候,I2C会自动把a0>>1=0x50去通信!
当然高端点的平台就不需要关注reg,只需配置唯一即可,最好的办法还是配置为i2c地址!
8909平台不支持reg配置成a0,内核中有效地址是0x00~0x7f直接,如果配置成a0,
会报错:Invalid7-bit I2C address 0xa0!!!
因此需要修改一下内核:
kernel/drivers/i2c/i2c-core.c
static int i2c_check_client_addr_validity(const struct i2c_client *client)
{
if (client->flags & I2C_CLIENT_TEN) {
/* 10-bit address, all values are valid */
if (client->addr > 0x3ff)
return -EINVAL;
} else {
if (client->addr == 0xa0)//让a0地址合法化!!!
return 0;
/* 7-bit address, reject the general call address */
if (client->addr == 0x00 || client->addr > 0x7f)
return -EINVAL;
}
return 0;
}
供电这一块,eeprom只需要IO供电即可:因此配置就更简单了
cam_vio-supply = <&pm8916_l10>;
qcom,cam-vreg-name = "cam_vio";
qcom,cam-vreg-type = <0>;
qcom,cam-vreg-min-voltage = <1800000>;
qcom,cam-vreg-max-voltage = <2800000>;
qcom,cam-vreg-op-mode = <80000>;
qcom,cam-power-seq-type = "sensor_vreg";
qcom,cam-power-seq-val ="cam_vio";
qcom,cam-power-seq-cfg-val = <1>;
qcom,cam-power-seq-delay = <10>;
读写规则:直接从0x00开始读1813个数据,不需要操作任何寄存器!
qcom,mem0 = <1813 0x0000 2 0 1 1>;
例子三:以GC8034为例子(数据烧录在Camera Sensor中)
GC8034的读写规则比较复杂,和高通要求的不一样!

高通的源码是给一个初始地址,然后不停+1的往后读取数据,最后保存在buffer中!
GC8034是去读d7这个寄存器的值!(这些读写规则,要多和模组厂跟sensor厂沟通)
因此要改动kernel层的源码
static int read_eeprom_memory(struct msm_eeprom_ctrl_t *e_ctrl,
struct msm_eeprom_memory_block_t *block)
if (emap[j].mem.valid_size) {
/* galaxycore start */
if(0 == strcmp(eb_info->eeprom_name,"gc8034_otp")){
e_ctrl->i2c_client.addr_type = 1; /* luyi */
/*读取0xf4到gc_readf4变量中*/
rc=e_ctrl->i2c_client.i2c_func_tbl->i2c_read(
&(e_ctrl->i2c_client), 0xf4, &gc_readf4, emap[j].mem.data_t);
/*往d4寄存器写page和高8位地址*/
e_ctrl->i2c_client.i2c_func_tbl->i2c_write(
&(e_ctrl->i2c_client), 0xd4, (emap[j].mem.addr >> 8) & 0xff, emap[j].mem.data_t);
/*往d5寄存器写低8位地址*/
e_ctrl->i2c_client.i2c_func_tbl->i2c_write(
&(e_ctrl->i2c_client), 0xd5, emap[j].mem.addr & 0xff, emap[j].mem.data_t);
/*往f3寄存器写入0x20:OTP read 模式*/
e_ctrl->i2c_client.i2c_func_tbl->i2c_write(
&(e_ctrl->i2c_client), 0xf3, 0x20, emap[j].mem.data_t);
/*往f4寄存器的第2位置1,表示地址自动++(按照1 个byte=8bit的方式)*/
e_ctrl->i2c_client.i2c_func_tbl->i2c_write(
&(e_ctrl->i2c_client), 0xf4, gc_readf4 | 0x02, emap[j].mem.data_t);
/*往f3寄存器写入80,设置自动读取信号*/
e_ctrl->i2c_client.i2c_func_tbl->i2c_write(
&(e_ctrl->i2c_client), 0xf3, 0x80, emap[j].mem.data_t);
msleep(emap[j].mem.delay);//延时
for(gc = 0; gc < emap[j].mem.valid_size; gc++){
msleep(emap[j].mem.delay);
rc=e_ctrl->i2c_client.i2c_func_tbl->i2c_read(//读d7寄存器的值到gc_read变量中
&(e_ctrl->i2c_client), 0xd7, &gc_read, emap[j].mem.data_t);
if (rc < 0) {
pr_err("%s: read failed %d \n", __func__, __LINE__);
return rc;
}
*memptr = (uint8_t)gc_read;//把读出来的值保持到memptr 中
memptr++;
}
e_ctrl->i2c_client.i2c_func_tbl->i2c_write(//读完复位成初始状态
&(e_ctrl->i2c_client), 0xf3, 0x00, emap[j].mem.data_t);
e_ctrl->i2c_client.i2c_func_tbl->i2c_write(//读完复位成初始状态
&(e_ctrl->i2c_client), 0xf4, gc_readf4 & 0xfd, emap[j].mem.data_t);
}
/*galaxycore end*/
else{//高通平台默认的读取方式
e_ctrl->i2c_client.addr_type = emap[j].mem.addr_t;
rc = e_ctrl->i2c_client.i2c_func_tbl->i2c_read_seq(
&(e_ctrl->i2c_client), emap[j].mem.addr,
memptr, emap[j].mem.valid_size);
pr_err("%s:travis read addr = %d,value = %d\n\n", __func__,emap[j].mem.addr,memptr[0]);
if (rc < 0) {
pr_err("%s: read failed\n", __func__);
return rc;
}
memptr += emap[j].mem.valid_size;
}
}
}
这样子会带来问题,导致kernel启动时间加长了30s,从而整个系统启动时间就延迟了30s!!!