Win10系统下VisualStudio2019编译配置LAStools-v2.0.0
目录
- 一、概述
-
- 1、LAStools-v2.0.0
- 2、下载解压
- 二、源码编译
-
- 2.1 打开
- 2.2 移除加载失败的项目
- 2.3 修改代码
- 2.4 配置管理器
- 2.5 修改输出目录
- 2.6 修改头文件目录
- 2.7 修改运行库
- 2.8 生成lib
- 2.9 lib路径
- 三、封装成库
- 四、VS2019配库
- 五、测试代码
- 六、结果展示
一、概述
1、LAStools-v2.0.0
由于某种历史原因,LAStools库又开始更新了。最近一次更新时间为:2022年1月7日。LASTools版本为:220107。由于一些请求,现在开始使用git发布功能。LASTools在YYMMDD方案中使用版本控制。这对于大多数LASTools用户来说是很常见的,因此也保留这个版本号。此外,我们将遵循开源版本的git版本控制指南。它们也可能随后流入源代码。因为我们有一段很像历史的东西,我们直接从2.0.0版开始。
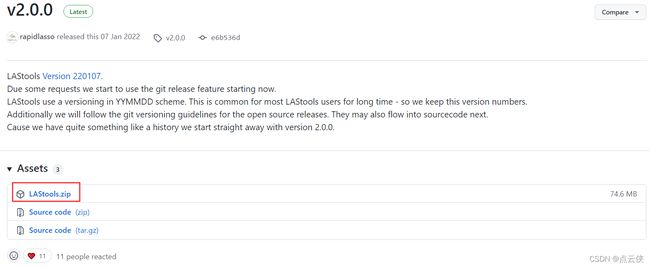
2、下载解压
github链接:https://github.com/LAStools/LAStools/releases/tag/v2.0.0
下载红框中的内容并解压
二、源码编译
2.1 打开
使用VS2019打开lastools.dsw

正在迁移解决方案和项目
出现如下界面时,一直点确定即可。
2.2 移除加载失败的项目
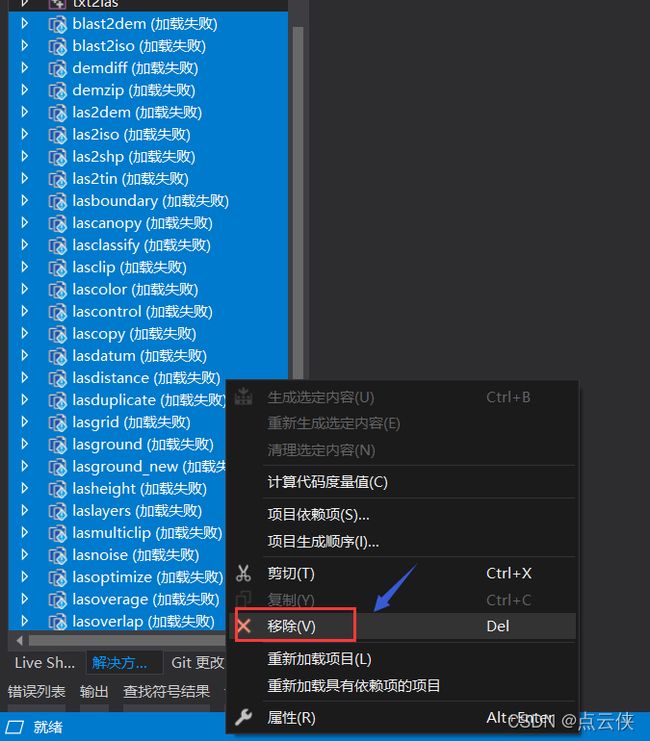
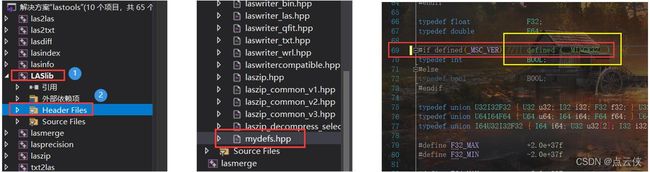
2.3 修改代码
打开LASlib的头文件mydefs.hpp,定位到69行,只保留 #if defined(_MSC_VER),删除或注释该行其它代码。
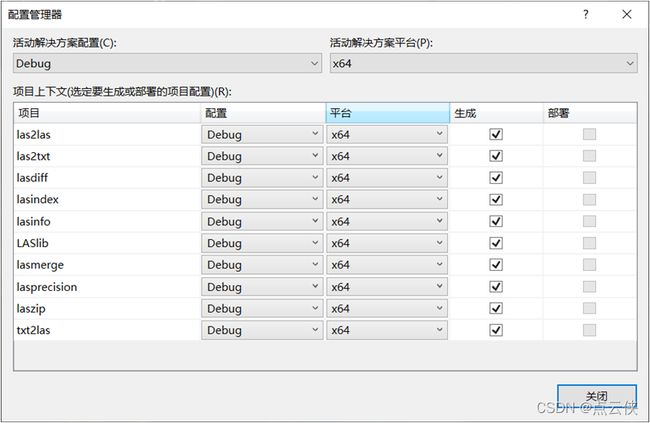
2.4 配置管理器
配置过程如下图所示:
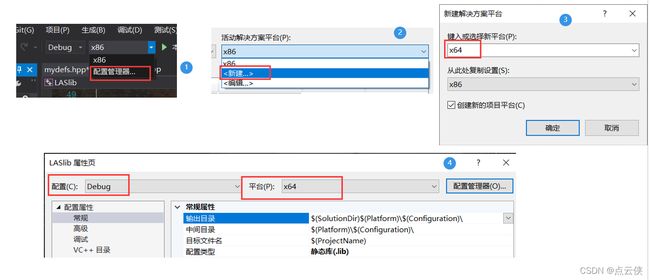
2.5 修改输出目录
右键LASlib—属性—配置属性—常规—输出目录—修改为:
$(SolutionDir)$(ProjectName)\$(Configuration)\
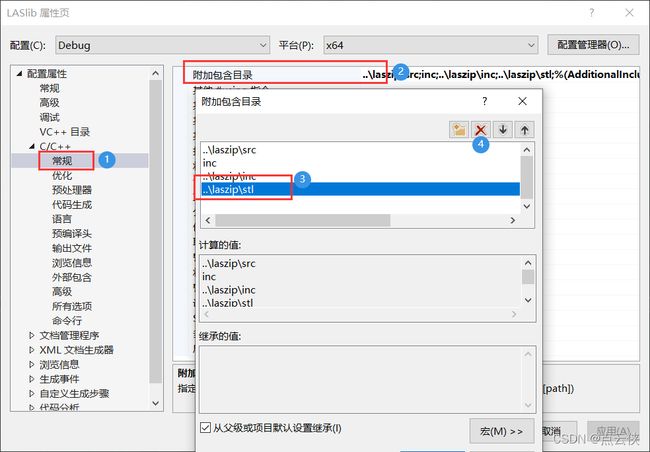
2.6 修改头文件目录
右键LASlib—配置属性—C/C++—常规—附加包含目录—删除“…\laszip\stl”
2.7 修改运行库
右键LASlib—属性—C/C++—代码生成—运行库—选择“多线程(/MD)”。(VS2019默认是多线程/MTd,此前,open3d编译时选择的是多线程(/MD),故此处也选择多线程(/MD))

2.8 生成lib
右键LASlib—重新生成。出现如下界面,则debug模式的lastools编译成功。

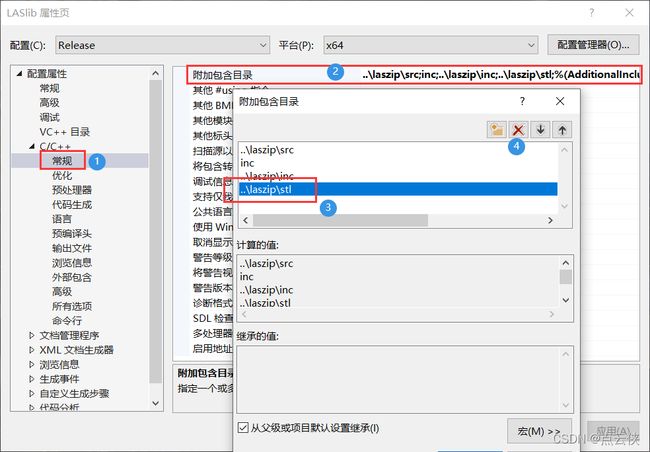
配置release模式

右键LASlib—配置属性—C/C++—常规—附加包含目录—删除“…\laszip\stl”
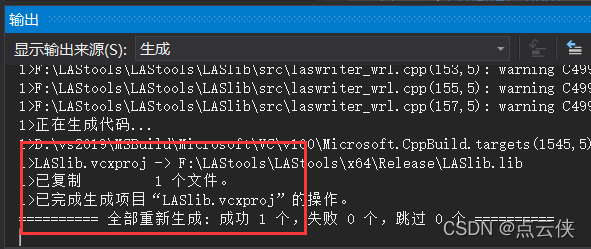
右键LASlib—重新生成。出现如下界面,则release模式的lastools编译成功。
2.9 lib路径
...\LAStools\LAStools\LASlib\lib

三、封装成库
- 打开LASlib—lib新建Debug和Release文件夹,将
LASlib.lib放入Release文件夹,将LASlibD.lib放入Debug文件夹。 - 新建文件夹LasLib,将
...\LAStools\LAStools\LASlib路径下的LASlib和lib文件夹拷贝过来放入新建文件夹中。 - 将
...\LAStools\LAStools\LASzip路径下的src文件夹拷贝过来放入新建文件夹中。库封装完毕。
四、VS2019配库
本人LASlib的路径为:
D:\Open3D_0.13.0\LASlib
- 配置属性—C/C++—代码生成—运行库,多线程(/MT),与步骤2.7的设置保持一致。
- VC++目录—包含目录
D:\Open3D_0.13.0\LASlib\include
D:\Open3D_0.13.0\LASlib\src
- VC++目录—库目录
Release模式
D:\Open3D_0.13.0\LASlib\lib\Release
Debug模式
D:\Open3D_0.13.0\LASlib\lib\Debug
- 附加依赖项
Release模式
LASlib.lib
Debug模式
LASlibD.lib
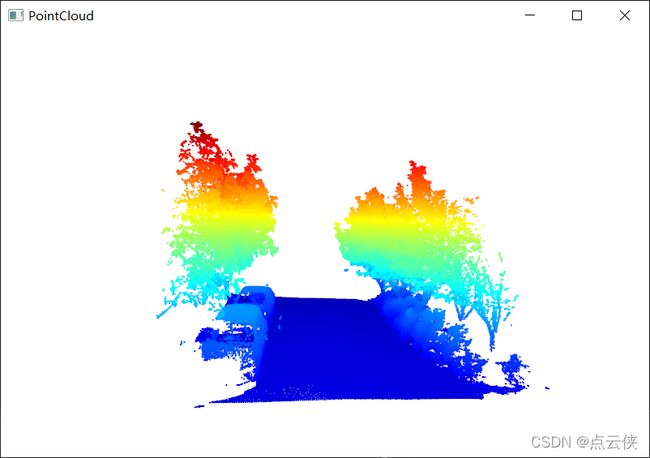
五、测试代码
#include 六、结果展示
reading 595018 points from 'R.las'.