从零开始实现yolox一:数据集类
数据集类
- 1 数据集及其划分
-
- (1)数据集文件组织结构
- (2)数据集的划分
- (3)从xml文件中提取目标信息(边框和分类)
- 2 数据集类
-
- (1)`__init__`与`__len__`函数
- (2)`__getitem__`函数
- (3)dataset测试脚本
- 3 collate_fn及测试脚本
本系列参考了博主Bubbliiiing的博客与代码,链接为:https://blog.csdn.net/weixin_44791964/article/details/120476949
在复现之前,有必要知道YOLOX的原理,以及pytorch框架的使用,这是最基础的部分。
让我们开始复现之旅吧。
1 数据集及其划分
(1)数据集文件组织结构
建立如图所示的目录结构用于存放数据

其中Annotations用于存放标签文件(即xml文件),ImageSets用于存放数据集划分后的txt文件,JPEGImages用于存放图片,图片要和标签文件的名字对应起来。
将图片和标签文件复制到Annotations和JPEGImages中,复制之后:
Annotations是下面这个样子
JPEGImages是下面这个样子
(2)数据集的划分
这个数据集中10506张图片,现计划按照7:1:2的方式划分训练集、验证集和测试集,并且把对应的文件名存放到train.txt、val.txt和test.txt文件中,那么可以在yolox_from_scratch下新建一个名为split_voc.py的程序,新建后目录结构如下:

split_voc.py内容如下:
import os
import random
trainval_percent = 0.8 # 训练集+验证集总占比
train_percent = 0.875 # 训练集在trainval_percent里的train占比,0.875*0.8=0.7,因此训练集在总样本中占比70%
VOCdevkit_path = 'VOCdevkit' # 数据集文件路径
random.seed(0) # 设定种子,使得程序能够复现
print("Generate txt in ImageSets.")
xmlfilepath = os.path.join(VOCdevkit_path, 'VOC2007/Annotations') # 标签文件路径
saveBasePath = os.path.join(VOCdevkit_path, 'VOC2007/ImageSets/Main') # 训练集、验证集、测试集txt文件的所在路径
temp_xml = os.listdir(xmlfilepath)
total_xml = []
for xml in temp_xml:
if xml.endswith(".xml"):
total_xml.append(xml)
num = len(total_xml) # 获得数据集样本的总数量
list = range(num) # 获得数据集样本的索引
tv = int(num * trainval_percent) # 验证集+训练集样本的总数量
tr = int(tv * train_percent) # 训练集样本的数量
trainval = random.sample(list, tv) # 训练集+验证集样本索引构成的列表
train = random.sample(trainval, tr) # 训练集样本索引构成的列表
# random.sample(list, tv) 表示从list中生成一个长度为tv新列表,新列表中的元素从list中取样获得
# 而list是一个range对象,表示数据集的索引
print("train and val size", tv)
print("train size", tr)
ftrainval = open(os.path.join(saveBasePath, 'trainval.txt'), 'w')
ftest = open(os.path.join(saveBasePath, 'test.txt'), 'w')
ftrain = open(os.path.join(saveBasePath, 'train.txt'), 'w')
fval = open(os.path.join(saveBasePath, 'val.txt'), 'w')
for i in list:
name = total_xml[i][:-4] + '\n' # total_xml[i][:-4]之所以只到-4,是因为最后4位是 .xml,这个我们暂时不需要
if i in trainval:
ftrainval.write(name)
if i in train:
ftrain.write(name)
else:
fval.write(name)
else:
ftest.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()
print("Generate txt in ImageSets done.")
输出
Generate txt in ImageSets.
train and val size 8404
train size 7353
Generate txt in ImageSets done.
此时VOCdevkit/VOC2007/ImageSets/Main多个几个文件,VOCdevkit的结构如下图所示:
四个txt文件中是样本的去掉后缀后的文件名,例如train.txt如下图所示

(3)从xml文件中提取目标信息(边框和分类)
数据集划分好了,但目标的边框和分类却还在xml文件中,下面我们将其提取出来。
我们在yolox_from_scratch下建立一个名为model_data的文件夹,用于存放需要的分类信息,新建之后,项目结构如下:
在yolox_from_scratch下新建一个名为annotations_convert.py的程序,内容如下:
import os
import xml.etree.ElementTree as ET
VOCdevkit_sets = [('2007', 'train'), ('2007', 'val')] # 数据集
VOCdevkit_path = 'VOCdevkit' # 数据集文件路径
classes = ['D00', 'D10', 'D20', 'D40'] # 类名
def convert_annotation(year, image_id, list_file):
in_file = open(os.path.join(VOCdevkit_path, 'VOC%s/Annotations/%s.xml' % (year, image_id)), encoding='utf-8')
tree = ET.parse(in_file) # 解析xml文件
root = tree.getroot() # 获得根目录
for obj in root.iter('object'):
difficult = 0
if obj.find('difficult') != None:
difficult = obj.find('difficult').text
cls = obj.find('name').text # 获得目标的类名
if cls not in classes: # 并非所有目标都是需要检测的
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (int(float(xmlbox.find('xmin').text)), int(float(xmlbox.find('ymin').text)),
int(float(xmlbox.find('xmax').text)), int(float(xmlbox.find('ymax').text)))
list_file.write(" " + ",".join([str(a) for a in b]) + ',' + str(cls_id))
# ",".join([str(a) for a in b])生生一个新的字符串,这个字符串用“,”列表进行分隔
if __name__ == '__main__':
print("Generate 2007_train.txt and 2007_val.txt for train.")
for year, image_set in VOCdevkit_sets:
image_ids = open(os.path.join(VOCdevkit_path, 'VOC%s/ImageSets/Main/%s.txt' % (year, image_set)),
encoding='utf-8').read().strip().split()
# os.path.join(VOCdevkit_path, 'VOC%s/ImageSets/Main/%s.txt' % (year, image_set))
# 返回 VOCdevkit/VOC2007/ImageSets/Main/train.txt 或 VOCdevkit/VOC2007/ImageSets/Main/test.txt
# read()是一次读取所有,它返回的是一个字符串,而readlines()返回的是一个列表,列表的每个元素都是一行
# strip()是去掉头尾的空字符
# split()使其能按\n符划分,因为read()返回的是所有行构成的一个字符串,也包括了换行符
list_file = open('%s_%s.txt' % (year, image_set), 'w', encoding='utf-8') # 打开2007_train.txt或者2007_val.txt
for image_id in image_ids:
list_file.write('%s/VOC%s/JPEGImages/%s.jpg' % (VOCdevkit_path, year, image_id)) # 将图片文件名写入
convert_annotation(year, image_id, list_file)
list_file.write('\n')
list_file.close()
print("Generate 2007_train.txt and 2007_val.txt for train done.")
with open('model_data/voc_classes.txt', 'w+') as f:
f.write('\n'.join(classes))
上面的程序之所以写的那么复杂,是因为从别的地方拷过来的,时间紧迫,没有来得及精简
程序运行之后,目录结构变成如下形式:

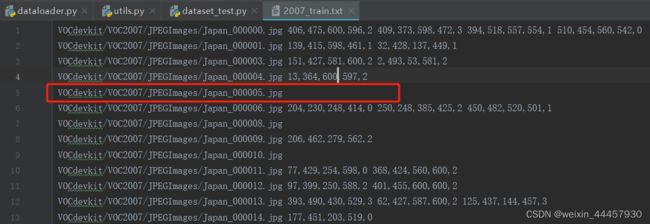
在yolox_from_scratch下多了两个txt文件,我们打开2007_train.txt,内容如下:

这个txt文件将图片名和对应的目标标签信息放在了同一行,2007_val.txt的内容也是类似。一张图片中可能存在多个目标(如Japan_00000.jpg),也有可能没有目标(如Japan_00005.jpg)。
在model_data下面多了一个名为voc_classes.txt的文件夹,内容如下:

2 数据集类
在yolox_from_scratch下新建一个程序包,名为utils,在里面新建一个名为dataloader.py的文件,新建后结构如下图所示:

(1)__init__与__len__函数
再dataloader.py中,先把要使用的包导入进来
from random import sample, shuffle
import cv2
import numpy as np
from PIL import Image
from torch.utils.data.dataset import Dataset
在这个py文件中定义一个数据集类,该类继承torch.utils.data中的Dataset类,自制的数据集类必须实现三个函数: __init__、__len__和__getitem__,分别是初始化类,求长度len(obj),通过索引获得单个样本及其标签。
先写__init__、__len__这两个函数:
import cv2
import numpy as np
from PIL import Image
from torch.utils.data.dataset import Dataset
class YoloDataset(Dataset):
def __init__(self, annotation_lines, input_shape, num_classes,
is_train, mosaic=False, mixup=False, mosaic_prob=0.5, mixup_prob=0.5):
"""
Args:
annotation_lines: 这是标签文件(例如2007_train.txt)中每一行构成的列表,通过open后readlines()获得
input_shape: 输入到模型的图像尺寸
num_classes: 需要检测的类数
is_train: 对应的模型是否为训练状态,这个对是否进行普通的数据增强有影响
在训练状态下,无论是否使用mosaic和mix_up数据增强,都必须要使用普通数据增强
普通的数据增强包括随机调整高宽比、随机镜像、色域扭曲等
如果不在训练状态(即eval状态),那么任何形式的数据增强都不使用
mosaic: 是否使用马赛克数据增强
mixup: 是否使用mix_up数据增强
mosaic_prob: 当mosaic=True时,图片进行马赛克数据增强的概率
mixup_prob: 当mixup=True时,图片进行mixup数据增强的概率
"""
super(YoloDataset, self).__init__()
self.annotation_lines = annotation_lines
self.length = len(self.annotation_lines) # 标签长度,其实就是图片数量
self.input_shape = input_shape # 输入到模型的图像尺寸
self.num_classes = num_classes # 需要检测的类别数
self.is_train = is_train # 对应的模型是否为训练状态
self.mosaic = mosaic # 是否使用马赛克数据增强
self.mixup = mixup # 是否使用mix_up数据增强
self.mosaic_prob = mosaic_prob # 当mosaic=True时,图片进行马赛克数据增强的概率
self.mixup_prob = mixup_prob # 当mixup=True时,图片进行mixup数据增强的概率
self.step_now = -1 # 用来对读取了多少张图片进行计数
def __len__(self):
return self.length
(2)__getitem__函数
接下来是__getitem__,通常来讲,自己定义的数据集类中,这个函数是最复杂的,因为在这个函数中,要对标签进行处理,将其转化成标准格式,如果涉及到了数据增强,也是在这个函数中进行处理。(一般在使用torch完成计算机视觉任务中,最难写的地方有两个,一个是这里的__getitem__函数,另一个是计算损失函数)
def __getitem__(self, index):
index = index % self.length # 将索引调整到0-self.length,防止索引越界
self.step_now += 1 # 读取图片计数+1
# ---------------------------------------------------#
# 训练时进行数据的随机增强
# 验证时不进行数据的随机增强
# ---------------------------------------------------#
if self.is_train:
if self.mosaic:
# 我看原版的yolox代码中,mosaic和mixup并非独立,只有当mosaic为True时,才会讨论mixup是否为True
# 但由于马赛克数据增强代码还没有整明白,所以这里先pass
pass
else:
image, box = self.get_random_data(self.annotation_lines[index], self.input_shape, rand=True)
else:
image, box = self.get_random_data(self.annotation_lines[index], self.input_shape, rand=False)
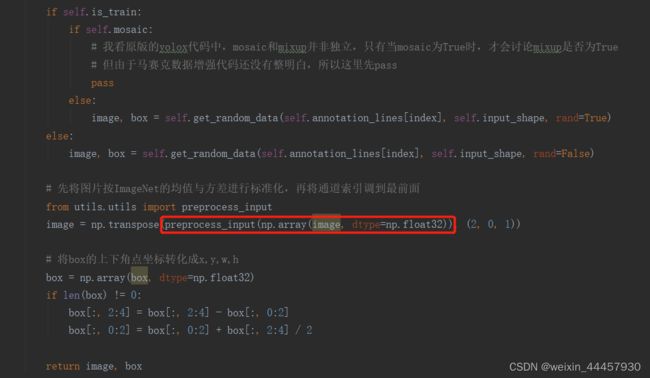
# 先将图片按ImageNet的均值与方差进行标准化,再将通道索引调到最前面
from utils.utils import preprocess_input
image = np.transpose(preprocess_input(np.array(image, dtype=np.float32)), (2, 0, 1))
# 指定数据类型,经过数据增强后,box的类型为np.int32,这里将其转化成np.float32
box = np.array(box, dtype=np.float32)
# 若当前图片没有目标,那么box将是一个空数组,没有类型,上面的命令也可以对空数组指定类型
# 将box的上下角点坐标转化成x,y,w,h
if len(box) != 0:
box[:, 2:4] = box[:, 2:4] - box[:, 0:2]
box[:, 0:2] = box[:, 0:2] + box[:, 2:4] / 2
return image, box
上面的程序中,调用了self.get_random_data和preprocess_input两个方法,我们先来讲self.get_random_data。
如果没有涉及到mosaic数据增强,那么都在self.get_random_data中进行处理,如果模型处于训练状态,那么就进行传统的数据增强(如随机缩放等),如果模型处于评估状态,那么就不做数据增强。
下面是函数get_random_data的注释
def get_random_data(self, annotation_line, input_shape, jitter=.3, hue=.1, sat=1.5, val=1.5, rand=True):
"""
传统数据增强策略,包括随机缩放、高宽扭曲、随机镜像、色域扭曲
关于色域(HSV颜色模型),可以看这篇文章:https://www.cnblogs.com/lfri/p/10426113.html
Args:
annotation_line:self.annotation_lines中的一行,里面有图片的路径、box标签的信息
input_shape:模型输入图片的尺寸,也就是说,这里要将图片转化成这个尺寸
jitter:用于生成一个宽高的缩放因子,例如jitter是0.3的时候,缩放因子为从(1-0.3,1+0.3)中随机生成一个
hue:色调
sat:饱和度
val:明亮度
rand:是否需要进行随机数据增强,因为只有模型处于训练状态下才需要数据增强,
所以这里的True、False代表模型是否处于训练状态
Returns:
"""
我们可以先从annotation_line中获得图像和box,这些通用信息无论是训练状态和评估状态,都能使用
"""将图片和标注信息分割"""
line = annotation_line.split()
"""读取图像并转换成RGB图像"""
from utils.utils import cvtColor
image = Image.open(line[0])
image = cvtColor(image)
"""获得图像的高宽与模型的输入高宽"""
iw, ih = image.size # 原图像的宽高
h, w = input_shape # 模型的输入尺寸,输入模型的尺寸,是高在前
"""获得目标框,并转化为numpy数组"""
box = np.array([np.array(list(map(int, box.split(',')))) for box in line[1:]]) # line是一个列表了
# 若图片中没有目标,那么line这个列表中只有一个元素,即图片的路径字符串
# 但是line[1:]不会报错,这会返回一个空列表,但line[1]会报错
# 也就是说,对于列表索引越界,如果是取单个元素则会报错,但如果是取切片则不会报错
这里调用了cvtColor函数,我们在utils中新建一个名为utils.py的文件,建立后的项目结构为:
在utils.py中写入下面的函数:
import numpy as np
# ---------------------------------------------------------#
# 将图像转换成RGB图像,防止灰度图在预测时报错。
# 代码仅仅支持RGB图像的预测,所有其它类型的图像都会转化成RGB
# ---------------------------------------------------------#
def cvtColor(image):
"""image是PIL.Image.open的返回值,该函数的意义在于将图像转化成RGB三个通道"""
if len(np.shape(image)) == 3 and np.shape(image)[-2] == 3: # 检查image是否为3个通道
return image
else:
image = image.convert('RGB')
return image
回到get_random_data中,我们先来处理模型处于评估状态时的情形:
"""如果非训练状态,就不需要数据增强了,直接进行 letter_box 转化"""
if not rand:
scale = min(w/iw, h/ih) # 按照原始图片的高宽中较大的一边来确定比例
# 因为模型的输入尺寸都是正方形,所以 iw=ih,因此 w/iw 和 h/ih 的分母相同
# 假如原图片中宽比较小,那么 w/iw 比较大,min(w/iw, h/ih)就是 h/ih
# 也就是说,scale是按照原始图片的高宽中较大的一边来确定比例
nw = int(iw*scale) # 新的宽
nh = int(ih*scale) # 新的高
dx = (w-nw)//2 # letter_box算法中左右两个灰条宽度
dy = (h-nh)//2 # 上下两个灰条宽度
# 因为横向和纵向,只有一个方向有灰条,因此dx和dy其中一个必然为0,
# 如果原始图片是正方形,那么dx和dy两个都为0
# 按照新的宽和高缩放图像
image = image.resize((nw,nh), Image.BICUBIC)
# 生成一个指定宽高的灰度图作为画布,其三个颜色通道都是128
new_image = Image.new('RGB', (w, h), (128, 128, 128)) # (128, 128, 128)是灰条的三通道像素值
# 将缩放后的图像粘贴到画布中央
new_image.paste(image, (dx, dy)) # 把缩放后的图片粘贴到new_image的指定位置
image_data = np.array(new_image, np.float32) # 转化成指定格式
# 对真实框进行调整
if len(box) > 0:
np.random.shuffle(box)
box[:, [0, 2]] = box[:, [0, 2]]*nw/iw + dx # 将上下角点的横坐标转化成letter_box后的横坐标
box[:, [1, 3]] = box[:, [1, 3]]*nh/ih + dy # 将上下角点的纵坐标转化成letter_box后的纵坐标
box[:, 0:2][box[:, 0:2] < 0] = 0 # 负值检查(为何横坐标有负值检查,而纵坐标没有?)
box[:, 2][box[:, 2] > w] = w # 越界检查
box[:, 3][box[:, 3] > h] = h
# 上面三项真的有必要吗?
box_w = box[:, 2] - box[:, 0] #
box_h = box[:, 3] - box[:, 1]
box = box[np.logical_and(box_w > 1, box_h > 1)] # discard invalid box 将宽高大于1的边框筛选出来
return image_data, box
如果模型处于训练状态,那么就不会执行上面的if语句,而是要进行数据增强,这里的数据增强分成4个部分:随机缩放与高宽扭曲、随机镜像、色域扭曲。
下面的程序是 随机缩放与高宽扭曲
"""对图像进行缩放并且进行高宽扭曲"""
new_ar = w/h * self.rand(1-jitter, 1+jitter) / self.rand(1-jitter, 1+jitter) # 随机生成一个新的宽高比
scale = self.rand(.25, 2) # 随机生成一个缩放因子
# 高和宽哪个大(可以根据new_ar来获得),就缩放哪个,另一个按照高宽比来获得
if new_ar < 1: #
nh = int(scale*h) # 现将高按缩放因子缩放
nw = int(nh*new_ar) # 根据新的高和新的高宽比,获得新的宽
else:
nw = int(scale*w)
nh = int(nw/new_ar)
# 根据新的宽和高,缩放图像
image = image.resize((nw, nh), Image.BICUBIC)
"""将图像多余的部分加上灰条,这里左右(或上下)的灰条,未必一样厚"""
dx = int(self.rand(0, w-nw))
dy = int(self.rand(0, h-nh))
# 上面的dx和dy有可能为负,因为scales有可能大于1,那么nh和nw有可能大于h和w
new_image = Image.new('RGB', (w, h), (128, 128, 128)) # 生成指定宽高的画布
new_image.paste(image, (dx, dy)) # 将缩放后的图像粘贴到画布的指定位置
# 如果dx大于0,那么说明w>nw,那么整个过程相当于是在横向缩小,然后在左右两边填充灰条
# 如果dx小于0,那么说明w
# dy也是类似的,总之,经过上面的命令之后,new_image的宽高就是(w, h)了
image = new_image
这里调用了self.rand函数,这是YoloDataset类的一个成员方法,如果没有指定参数,则生成一个0-1之间的随机数,如果指定了a和b,那就生成一个a-b之间的随机数
def rand(self, a=0, b=1):
"""生成一个a-b之间的随机数,比如要生成一个0-100的随机数,那么可以a=0, b=100"""
return np.random.rand()*(b-a) + a
回到get_random_data中,接下来是色域扭曲:
"""色域扭曲"""
hue = self.rand(-hue, hue) # 新的色调比例
sat = self.rand(1, sat) if self.rand()<.5 else 1/self.rand(1, sat) # 新的饱和度
val = self.rand(1, val) if self.rand()<.5 else 1/self.rand(1, val) # 新的明亮度
x = cv2.cvtColor(np.array(image, np.float32)/255, cv2.COLOR_RGB2HSV) # 将RGB转HSV,获得新的图形(numpy数组)
# 调整色调
x[..., 0] += hue * 360
x[..., 0][x[..., 0] > 360] -= 360 # 根据周期将色调调整到合理区间
x[..., 0][x[..., 0] < 0] += 360 # 将色调调整到合理区间
# x[..., 0]返回的是一个shape为(nw, nh)的numpy数组,
# x[..., 0]>360返回的是一个shape为(nw, nh)的布尔数组
# x[..., 0][x[..., 0] > 360] 和 x[..., 0][x[..., 0] < 360]是布尔索引
# 因为x[..., 0] += hue之后,hue有可能大于360,也有可能小于0,这里是将其调整到0-360这个区间内
# 调整饱和度与亮度
x[..., 1] *= sat
x[..., 2] *= val
# 将饱和度、亮度调整到0-1之间
x[:, :, 1:][x[:, :, 1:] > 1] = 1
x[:, :, 1:][x[:, :, 1:] < 0] = 0
# 将HSV转回RGB
image_data = cv2.cvtColor(x, cv2.COLOR_HSV2RGB)*255 # 将HSV转回RGB
上面的程序中,将RGB转化为HSV时,图像数据进行了归一化,这使得转化成HSV后,饱和度与亮度都归一化了,但色域却没有,转化后色域依然是0~360。
最后是根据数据增强的情况对目标框进行调整,并返回增强后的图像及目标框
"""对目标框进行调整"""
if len(box) > 0:
np.random.shuffle(box)
# 根据图像缩放比例和灰条确定新的box的位置
box[:, [0, 2]] = box[:, [0, 2]]*nw/iw + dx
box[:, [1, 3]] = box[:, [1, 3]]*nh/ih + dy
# 根据是否进行了镜像操作,对box的横坐标进行操作
if flip:
box[:, [0, 2]] = w - box[:, [2, 0]]
# box的异常值检查
box[:, 0:2][box[:, 0:2] < 0] = 0
box[:, 2][box[:, 2] > w] = w
box[:, 3][box[:, 3] > h] = h
# 将宽和高合格的box筛选出来
box_w = box[:, 2] - box[:, 0]
box_h = box[:, 3] - box[:, 1]
box = box[np.logical_and(box_w > 1, box_h > 1)]
"""返回图像数据(numpy数组)和边框(同样是numpy数组)"""
return image_data, box
接下来写前面提到的preprocess_input方法
在utils.py中加入下面的函数
def preprocess_input(image):
"""在输入模型前,将图片先标准化(按imagenet)的均值与方差
"""
image /= 255.0
image -= np.array([0.485, 0.456, 0.406]) # imagenet的均值 # TODO 这里的均值和方差,是否需要修改成自己的数据集?
image /= np.array([0.229, 0.224, 0.225]) # imagenet的标准差
return image
(3)dataset测试脚本
好的,现在我们已经完成数据集类了,接下来写一个测试脚本。
在yolox_from_scratch下新建一个名为dataloader_test.py的文件,内容如下:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from utils.dataloader import YoloDataset
import cv2
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
if __name__ == '__main__':
"""设置种子"""
np.random.seed(0)
"""获得数据集类的相关初始化参数"""
train_annotation_path = '2007_train.txt'
with open(train_annotation_path) as f:
train_lines = f.readlines() # train_lines将是一个列表
input_shape = [640, 640]
num_classes = 4
mosaic = False
mixup = False
"""建立数据集类对象"""
train_dataset = YoloDataset(train_lines, input_shape, num_classes, is_train=True, mosaic=mosaic, mixup=mixup)
"""通过索引获得增强后的图像及标签"""
img, boxes = train_dataset[2]
img = np.transpose(img, (1, 2, 0)) # 将通道调整到最后
print("boxes info after data_augmentation (center_x, center_y, w, h):")
print(boxes)
# 绘图
ax1 = plt.subplot(1, 2, 1)
ax1.imshow(img)
for box in boxes:
# center_x, center_y, w, h, _ = tuple(map(int, value) for value in box)
center_x, center_y, w, h, _ = box[0], box[1], box[2], box[3], box[4]
ax1.add_patch(patches.Rectangle((center_x-w//2, center_y-h//2), w, h, facecolor="red", alpha=0.3))
# Rectangle的第一个参数最靠近0的点的坐标(这里是左上角),后面是宽和高,然后是颜色和透明度
ax1.set_title("data_augmentation")
"""原始图片与标签"""
orig_info = train_lines[2]
line = orig_info.split()
img_dir = line[0] # 图片路径
boxes = line[1:] # 目标框信息
boxes = np.array([np.array(list(map(int, box.split(',')))) for box in line[1:]])
print("original boxes:")
print(boxes)
# 绘图
ax2 = plt.subplot(1, 2, 2)
img_orig = cv2.imread(img_dir)
img_orig = cv2.cvtColor(img_orig, cv2.COLOR_BGR2RGB)
ax2.imshow(img_orig)
for box in boxes:
top_left_x, top_left_y, low_right_x, low_right_y, _ = box[0], box[1], box[2], box[3], box[4]
w = (top_left_x + low_right_x)//2
h = (top_left_y + low_right_y)//2
ax2.add_patch(patches.Rectangle((top_left_x, top_left_y), w, h, facecolor="red", alpha=0.3))
ax2.set_title("original")
plt.show()
终端输出为:
boxes info after data_augmentation (center_x, center_y, w, h):
[[383. 576. 514. 128. 2.]
[ 1. 622. 2. 36. 2.]]
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
original boxes:
[[151 427 581 600 2]
[ 2 493 53 581 2]]
这边注意一下,经过数据增强后的第二个box,它的宽仅仅是2个像素,通常情况下不可能是这么小,只有可能是随机裁剪,使得目标框被剪掉了,结合图形,我们可以看到目标框在增强图和原图中的情况:
在 2007_train.txt文件中,第五行只有图片路径,没有边框信息,我们将索引改为4,来debug一下程序,看看无边框时,__getitem__返回的box是什么,并且跟踪__getitem__中box的类型变化。
程序如下,因为这里不好显示debug过程,所以这里就直接运行,自己敲的时候,最好debug
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from utils.dataloader import YoloDataset
import cv2
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
if __name__ == '__main__':
"""设置种子"""
np.random.seed(0)
"""获得数据集类的相关初始化参数"""
train_annotation_path = '2007_train.txt'
with open(train_annotation_path) as f:
train_lines = f.readlines() # train_lines将是一个列表
input_shape = [640, 640]
num_classes = 4
mosaic = False
mixup = False
"""建立数据集类对象"""
train_dataset = YoloDataset(train_lines, input_shape, num_classes, is_train=True, mosaic=mosaic, mixup=mixup)
"""通过索引获得增强后的图像及标签"""
img, boxes = train_dataset[4] # 索引为4,对应的图片名称为 VOCdevkit/VOC2007/JPEGImages/Japan_000005.jpg
img = np.transpose(img, (1, 2, 0)) # 将通道调整到最后
print("boxes info after data_augmentation (center_x, center_y, w, h):")
print(boxes)
print(type(boxes)) # 再增加一行打印boxes的类型
# 绘图
ax1 = plt.subplot(1, 2, 1)
ax1.imshow(img)
for box in boxes:
# center_x, center_y, w, h, _ = tuple(map(int, value) for value in box)
center_x, center_y, w, h, _ = box[0], box[1], box[2], box[3], box[4]
ax1.add_patch(patches.Rectangle((center_x-w//2, center_y-h//2), w, h, facecolor="red", alpha=0.3))
# Rectangle的第一个参数最靠近0的点的坐标(这里是左上角),后面是宽和高,然后是颜色和透明度
ax1.set_title("data_augmentation")
"""原始图片与标签"""
orig_info = train_lines[4] # 索引为4,对应的图片名称为 VOCdevkit/VOC2007/JPEGImages/Japan_000005.jpg
line = orig_info.split()
img_dir = line[0] # 图片路径
boxes = line[1:] # 目标框信息
boxes = np.array([np.array(list(map(int, box.split(',')))) for box in line[1:]])
print("original boxes:")
print(boxes)
# 绘图
ax2 = plt.subplot(1, 2, 2)
img_orig = cv2.imread(img_dir)
img_orig = cv2.cvtColor(img_orig, cv2.COLOR_BGR2RGB)
ax2.imshow(img_orig)
for box in boxes:
top_left_x, top_left_y, low_right_x, low_right_y, _ = box[0], box[1], box[2], box[3], box[4]
w = (top_left_x + low_right_x)//2
h = (top_left_y + low_right_y)//2
ax2.add_patch(patches.Rectangle((top_left_x, top_left_y), w, h, facecolor="red", alpha=0.3))
ax2.set_title("original")
plt.show()
这边输出
boxes info after data_augmentation (center_x, center_y, w, h):
[]
<class 'numpy.ndarray'>
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
original boxes:
[]
显示的图像为:
3 collate_fn及测试脚本
在dataloader.py中增加一个函数,这样就能通过DataLoader一次性导入多张图片及其标签(即一个batch的data和targets)
# DataLoader中collate_fn使用
def yolo_dataset_collate(batch):
images = []
bboxes = []
for img, box in batch:
images.append(img)
bboxes.append(box)
images = np.array(images)
return images, bboxes
上面的函数,将整个batch的所有图片整合成一个张量(numpy数组),而每张图片对应的box原来是是一个二维的numpy数组,但上面的函数将一个batch中的所有box都放到了同一个列表当中。
我们来写两个测试脚本
第一个脚本测试返回值类型:
代码如下:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from torch.utils.data import DataLoader
from utils.dataloader import YoloDataset, yolo_dataset_collate
if __name__ == '__main__':
"""设置种子"""
np.random.seed(0)
"""获得数据集类的相关初始化参数"""
train_annotation_path = '2007_train.txt'
with open(train_annotation_path) as f:
train_lines = f.readlines() # train_lines将是一个列表
input_shape = [640, 640]
num_classes = 4
mosaic = False
mixup = False
"""建立数据集类对象"""
train_dataset = YoloDataset(train_lines, input_shape, num_classes, is_train=True, mosaic=mosaic, mixup=mixup)
batch_size = 4
num_workers = 4
"""建立导入器对象"""
gen = DataLoader(train_dataset, batch_size=batch_size, num_workers=num_workers, pin_memory=True,
drop_last=True, collate_fn=yolo_dataset_collate)
for iteration, batch in enumerate(gen):
images, targets = batch[0], batch[1]
print("images type", type(images))
print("images shape", images.shape)
print("targets type", type(targets))
print(targets)
print('-'*50)
if iteration == 1:
break
输出
images type <class 'numpy.ndarray'>
images shape (4, 3, 640, 640)
targets type <class 'list'>
[array([[570. , 541. , 54. , 78. , 0. ],
[505.5, 575. , 177. , 32. , 1. ],
[535. , 574.5, 210. , 107. , 2. ],
[535.5, 474.5, 205. , 87. , 3. ]], dtype=float32), array([[ 59., 515., 118., 30., 1.],
[380., 514., 520., 66., 1.]], dtype=float32), array([[492.5, 373. , 39. , 50. , 2. ],
[237. , 360. , 324. , 98. , 2. ]], dtype=float32), array([[322., 412., 636., 174., 2.]], dtype=float32)]
--------------------------------------------------
images type <class 'numpy.ndarray'>
images shape (4, 3, 640, 640)
targets type <class 'list'>
[array([], dtype=float32), array([[348.5, 255.5, 155. , 299. , 2. ],
[244. , 230.5, 50. , 311. , 0. ],
[540. , 517. , 80. , 32. , 1. ]], dtype=float32), array([], dtype=float32), array([[187.5, 411. , 39. , 58. , 2. ]], dtype=float32)]
--------------------------------------------------
第二个脚本用来绘图,代码如下:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.patches as patches
from torch.utils.data import DataLoader
from utils.dataloader import YoloDataset, yolo_dataset_collate
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
if __name__ == '__main__':
"""设置种子"""
np.random.seed(0)
"""获得数据集类的相关初始化参数"""
train_annotation_path = '2007_train.txt'
with open(train_annotation_path) as f:
train_lines = f.readlines() # train_lines将是一个列表
input_shape = [640, 640]
num_classes = 4
mosaic = False
mixup = False
"""建立数据集类对象"""
train_dataset = YoloDataset(train_lines, input_shape, num_classes, is_train=True, mosaic=mosaic, mixup=mixup)
batch_size = 4
num_workers = 4
"""建立导入器对象"""
gen = DataLoader(train_dataset, batch_size=batch_size, num_workers=num_workers, pin_memory=True,
drop_last=True, collate_fn=yolo_dataset_collate)
for iteration, batch in enumerate(gen):
images, targets = batch[0], batch[1]
images = np.transpose(images, (0, 2, 3, 1)) # 将通道调整到最后,方便绘图
ax = [0, 0, 0, 0]
for index in range(4):
ax[index] = plt.subplot(2, 2, index+1)
ax[index].imshow(images[index])
for box in targets[index]:
# center_x, center_y, w, h, _ = tuple(map(int, value) for value in box)
center_x, center_y, w, h, _ = box[0], box[1], box[2], box[3], box[4]
ax[index].add_patch(patches.Rectangle((center_x - w // 2, center_y - h // 2), w, h, facecolor="red", alpha=0.3))
# Rectangle的第一个参数最靠近0的点的坐标(这里是左上角),后面是宽和高,然后是颜色和透明度
break
plt.show()
显示的图像:

至此,数据集类和配套的collate_fn讲解完毕,下一节我们来搭建yolox的网络结构。