RunLoop 的概念
function loop() {
initialize();
do {
var message = get_next_message();
process_message(message);
} while (message != quit);
}
RunLoop 与线程的关系
/// 全局的Dictionary,key 是 pthread_t, value 是 CFRunLoopRef
static CFMutableDictionaryRef loopsDic;
/// 访问 loopsDic 时的锁
static CFSpinLock_t loopsLock;
/// 获取一个 pthread 对应的 RunLoop。
CFRunLoopRef _CFRunLoopGet(pthread_t thread) {
OSSpinLockLock(&loopsLock);
if (!loopsDic) {
// 第一次进入时,初始化全局Dic,并先为主线程创建一个 RunLoop。
loopsDic = CFDictionaryCreateMutable();
CFRunLoopRef mainLoop = _CFRunLoopCreate();
CFDictionarySetValue(loopsDic, pthread_main_thread_np(), mainLoop);
}
/// 直接从 Dictionary 里获取。
CFRunLoopRef loop = CFDictionaryGetValue(loopsDic, thread));
if (!loop) {
/// 取不到时,创建一个
loop = _CFRunLoopCreate();
CFDictionarySetValue(loopsDic, thread, loop);
/// 注册一个回调,当线程销毁时,顺便也销毁其对应的 RunLoop。
_CFSetTSD(..., thread, loop, __CFFinalizeRunLoop);
}
OSSpinLockUnLock(&loopsLock);
return loop;
}
CFRunLoopRef CFRunLoopGetMain() {
return _CFRunLoopGet(pthread_main_thread_np());
}
CFRunLoopRef CFRunLoopGetCurrent() {
return _CFRunLoopGet(pthread_self());
}
RunLoop核心数据结构
- CFRunLoopRef
- CFRunLoopModeRef
- CFRunLoopSourceRef
- CFRunLoopTimerRef
- CFRunLoopObserverRef
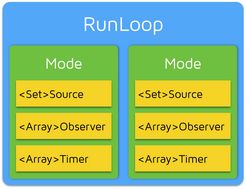
Runloop
CFRunLoop中包含多个CFRunLoopMode对象,每个CFRunLoopMode对象都可以包含Source(Set),Oberserver(Array),Timer(Array)对象集合.
CFRunLoopSourceRef:
source0 : 包含了一个函数指针。 CFRunLoopSourceSignal(source) CFRunLoopWakeUp(runloop) 手动唤醒线程runloop
source1 :基于Mach Port ,包含了一个函数指针和一个MachPort端口,能主动唤醒线程runloop。
CFRunLoopTimerRef:也跟machPort有点关系,其实它是通过mk_timer实现的。
CFRunLoopObserverRef:
typedef CF_OPTIONS(CFOptionFlags, CFRunLoopActivity) {
kCFRunLoopEntry = (1UL << 0), // 即将进入Loop
kCFRunLoopBeforeTimers = (1UL << 1), // 即将处理 Timer
kCFRunLoopBeforeSources = (1UL << 2), // 即将处理 Source
kCFRunLoopBeforeWaiting = (1UL << 5), // 即将进入休眠
kCFRunLoopAfterWaiting = (1UL << 6), // 刚从休眠中唤醒
kCFRunLoopExit = (1UL << 7), // 即将退出Loop
};
RunLoop 和 RunloopMode
struct __CFRunLoopMode {
CFStringRef _name; // Mode Name, 例如 @"kCFRunLoopDefaultMode"
CFMutableSetRef _sources0; // Set
CFMutableSetRef _sources1; // Set
CFMutableArrayRef _observers; // Array
CFMutableArrayRef _timers; // Array
...
};
struct __CFRunLoop {
CFMutableSetRef _commonModes; // Set
CFMutableSetRef _commonModeItems; // Set
CFRunLoopModeRef _currentMode; // Current Runloop Mode
CFMutableSetRef _modes; // Set
...
};
Runloop内部循环的逻辑
/// RunLoop的实现
int CFRunLoopRunSpecific(runloop, modeName, seconds, stopAfterHandle) {
/// 首先根据modeName找到对应mode
CFRunLoopModeRef currentMode = __CFRunLoopFindMode(runloop, modeName, false);
/// 如果mode里没有source/timer/observer, 直接返回。
if (__CFRunLoopModeIsEmpty(currentMode)) return;
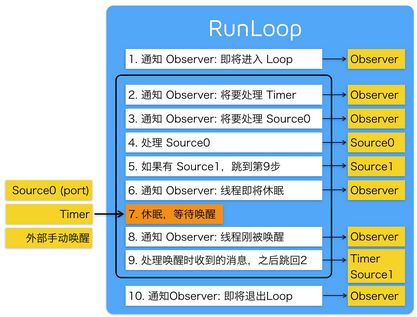
/// 1. 通知 Observers: RunLoop 即将进入 loop。
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopEntry);
/// 内部函数,进入loop
__CFRunLoopRun(runloop, currentMode, seconds, returnAfterSourceHandled) {
Boolean sourceHandledThisLoop = NO;
int retVal = 0;
do {
/// 2. 通知 Observers: RunLoop 即将触发 Timer 回调。
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopBeforeTimers);
/// 3. 通知 Observers: RunLoop 即将触发 Source0 (非port) 回调。
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopBeforeSources);
/// 执行被加入的block
__CFRunLoopDoBlocks(runloop, currentMode);
/// 4. RunLoop 触发 Source0 (非port) 回调。
sourceHandledThisLoop = __CFRunLoopDoSources0(runloop, currentMode, stopAfterHandle);
/// 执行被加入的block
__CFRunLoopDoBlocks(runloop, currentMode);
/// 5. 如果有 Source1 (基于port) 处于 ready 状态,直接处理这个 Source1 然后跳转去处理消息。
if (__Source0DidDispatchPortLastTime) {
Boolean hasMsg = __CFRunLoopServiceMachPort(dispatchPort, &msg)
if (hasMsg) goto handle_msg;
}
/// 通知 Observers: RunLoop 的线程进入休眠(sleep)。
if (!sourceHandledThisLoop) {
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopBeforeWaiting);
}
/// 7. 调用 mach_msg 等待接受 mach_port 的消息。线程将进入休眠, 直到被下面某一个事件唤醒。
/// ? 一个基于 port 的Source 的事件。
/// ? 一个 Timer 到时间了
/// ? RunLoop 自身的超时时间到了
/// ? 被其他什么调用者手动唤醒
mach_msg(msg, MACH_RCV_MSG, port); // thread wait for receive msg
/// 8. 通知 Observers: RunLoop 的线程刚刚被唤醒了。
__CFRunLoopDoObservers(runloop, currentMode, kCFRunLoopAfterWaiting);
/// 收到消息,处理消息。
handle_msg:
/// 9.1 如果一个 Timer 到时间了,触发这个Timer的回调。
if (msg_is_timer) {
__CFRunLoopDoTimers(runloop, currentMode, mach_absolute_time())
}
/// 9.2 如果有dispatch到main_queue的block,执行block。
else if (msg_is_dispatch) {
__CFRUNLOOP_IS_SERVICING_THE_MAIN_DISPATCH_QUEUE__(msg);
}
/// 9.3 如果一个 Source1 (基于port) 发出事件了,处理这个事件
else {
CFRunLoopSourceRef source1 = __CFRunLoopModeFindSourceForMachPort(runloop, currentMode, livePort);
sourceHandledThisLoop = __CFRunLoopDoSource1(runloop, currentMode, source1, msg);
if (sourceHandledThisLoop) {
mach_msg(reply, MACH_SEND_MSG, reply);
}
}
/// 执行加入到Loop的block
__CFRunLoopDoBlocks(runloop, currentMode);
if (sourceHandledThisLoop && stopAfterHandle) {
/// 进入loop时参数说处理完事件就返回。
retVal = kCFRunLoopRunHandledSource;
} else if (timeout) {
/// 超出传入参数标记的超时时间了
retVal = kCFRunLoopRunTimedOut;
} else if (__CFRunLoopIsStopped(runloop)) {
/// 被外部调用者强制停止了
retVal = kCFRunLoopRunStopped;
} else if (__CFRunLoopModeIsEmpty(runloop, currentMode)) {
/// source/timer/observer一个都没有了
retVal = kCFRunLoopRunFinished;
}
/// 如果没超时,mode里没空,loop也没被停止,那继续loop。
} while (retVal == 0);
}
/// 10. 通知 Observers: RunLoop 即将退出。
__CFRunLoopDoObservers(rl, currentMode, kCFRunLoopExit);
}
如下图所示:
循环
这里等待唤醒的时候是通过Source1去实现的,所以这张图有问题。
mach_msg

内核
OKit 层是为设备驱动提供了一个面向对象(C++)的一个框架。
BSD 层可以看作围绕 Mach 层的一个外环,其提供了诸如进程管理、文件系统和网络等功能。
Mach 有的东西都是通过自己的对象实现的,进程、线程和虚拟内存都被称为"对象"。和其他架构不同, Mach 的对象间不能直接调用,只能通过消息传递的方式实现对象间的通信。"消息"是 Mach 中最基础的概念,消息在两个端口 (port) 之间传递,这就是 Mach 的 IPC (进程间通信) 的核心。
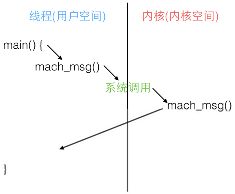
mach_msg