凌云视觉案例与工具应用
注意数据对象的类型。
调试前把产品转正,使轴的坐标移动方向和图像坐标的移动方向一致。
一、 工程案例


标定工具及流程:
(1)标准标定:建立一个相机中图像坐标系和世界坐标系的关联。如图独立标定流程 。
标定协议:机台向相机发送C2,step,X,Y,R。step:表示标定步数,X,Y,R:发送要走的点位坐标。
工具块:
标定计数:取出标定步数step作为索引。
保存坐标:保存世界坐标X,Y,R。
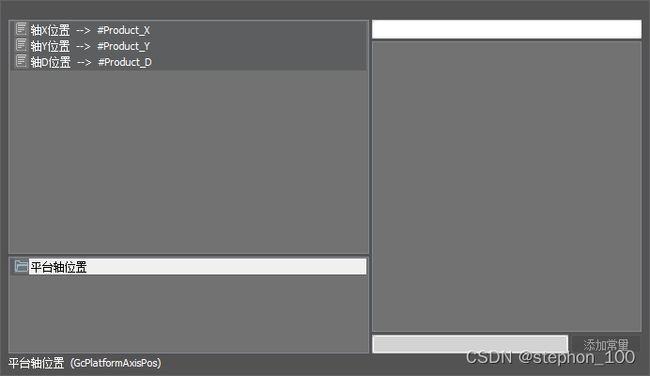
轴位置生成:将X,Y,R转换为凌云内部可接受的轴点位类型GcPlatformAxisPos。
标准标定轴:创建一个标准的轴类型,用于设置标定步长,方向等参数。
几何定位:定位产品特征的位置。
线查找和交点:找到产品的一个特征点来代替产品在图像中的位置。
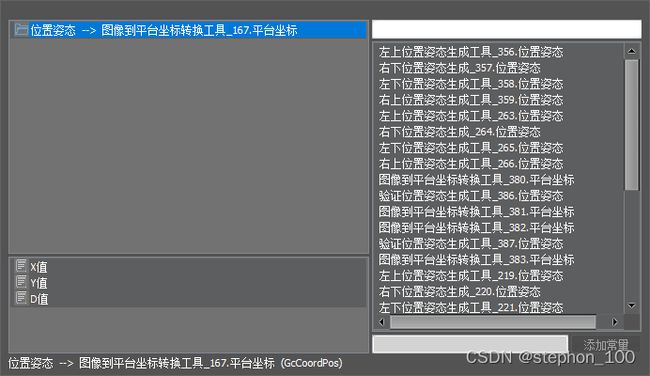
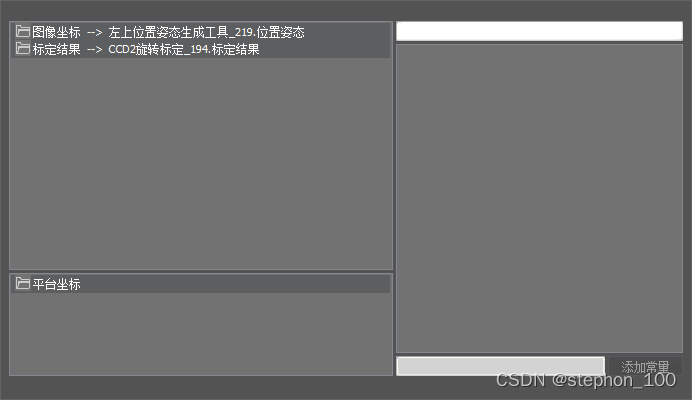
位置姿态生成:将点位数组转换为图像坐标,凌云内部的数据类型GcCoordPos。
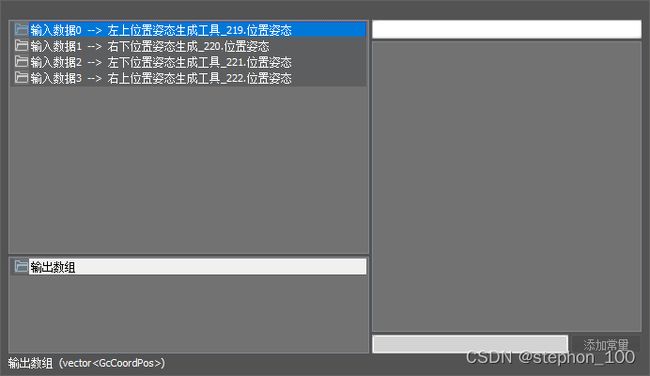
数组生成工具:输入对应的数据和索引号,生成数组,这里是输入每个图像坐标点位。
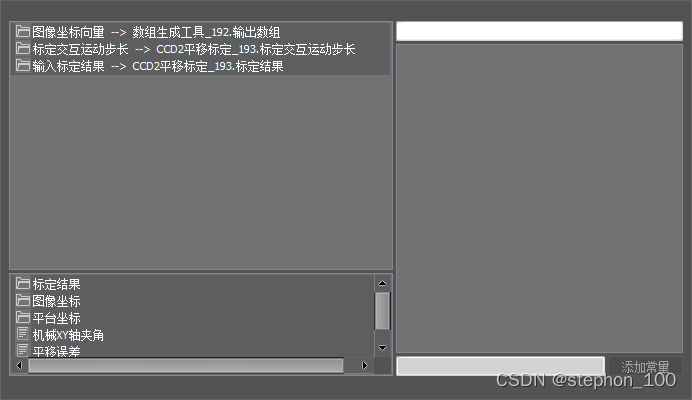
标准标定计算工具:第一个设置的是选择5点XY平移标定,第二个设置的是3点D轴旋转标定。输入的参数就是图像坐标点位数组,和标准标定轴工具中设置的运动步长。经过了平移和旋转标定之后由旋转标定得到的标定结果就是最终可使用的标定结果。
(2)关联标定:将两个相机的图像坐标关联起来。实现把一个相机中的坐标转化为另一个相机的坐标。可以是图像坐标也可以是世界坐标。
多元数组生成工具:和数组生成工具不同的是需要一次性指定所有的数组元素。
关联标定工具:
这里找到4个圆,得到圆心,将其放在数组中作为该相机的4个标准数据点,用于后面其他相机做关联标定时使用。
总结:该案例中一共3个相机,上相机,下相机1和下相机2。以其中一个相机作为标准,这里选用下相机1,进行用于图像和世界坐标系转换的9点标定。其他2个相机只需要和下相机1做一次关联标定,以实现其他相机的图像坐标转化为下相机1的图像坐标,再用下相机1的九点标定结果就可以转化为世界坐标。
贴装流程:
要求:两个下相机定位产品,上相机定位载具,然后把产品放在载具上。产品和载具各需要通过找到一点来确定位置,一条线来确定角度。
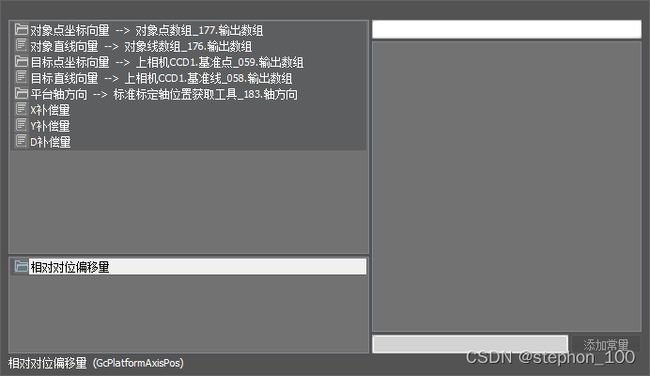
流程:下相机1右下角找到1点图像坐标,下相机2左下角找到1点, 将图像坐标转换为世界坐标。从图像到平台转换时由于正常生产时的轴拍照位置和标定时的轴位置不同,所以用转换工具时属性需要选择“包含平台轴位置变化”选项,然后输入必要参数。接下来找到这两条线的中点,作为产品的位置,同时把两个角点连成的线通过“直线图像到平台转换工具”也转换到世界坐标系。上相机以同样的方法找到载具的中点和线并转换到世界坐标。这样产品和载具的位置和角度都得到了,就可以通过“多点线对位工具”实现产品和载具的对位,计算出偏移补偿数据。
二、工具详情
1、工具界面
(1)相机管理界面

(2)通信管理界面

(3)变量管理界面


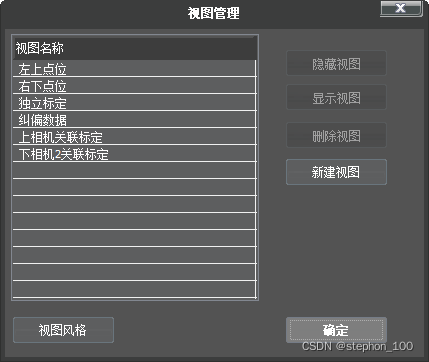
(4)视图管理界面
2、常用框架工具
(1)图像采集工具

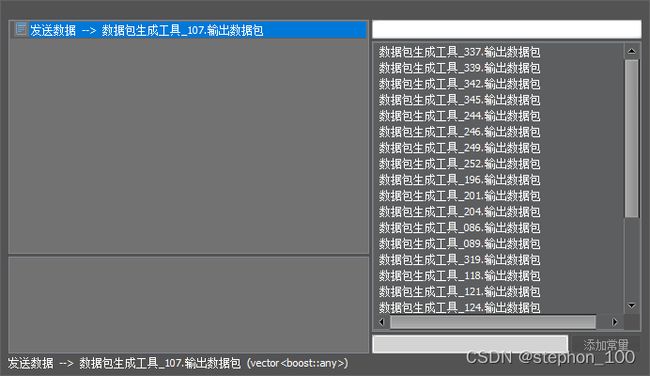
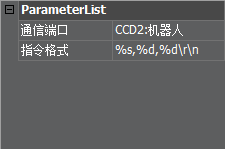
(2)通信发送工具
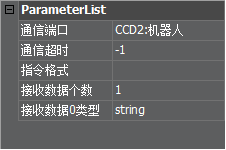
(3)通信接收工具
3、常用工具
(1)位置姿态生成&位置姿态拆散

(2)数组生成&多元数组生成

(3)轴位置生成&轴位置解析

(4)标准标定轴工具


(5)标准标定工具(5点XY平移标定&3点D轴旋转标定)

(6)图像到平台转换工具(不包含平台轴变化&包含平台轴变化)

(7)直线到平台转换工具

(8)标定结果解析工具

(9)多点线对位工具
(10)圆查找&线查找

