2021电赛F题智能送药小车方案分析(openMV数字识别,红线循迹,STM32HAL库freeRTOS,串级PID快速学习,小车自动返回)
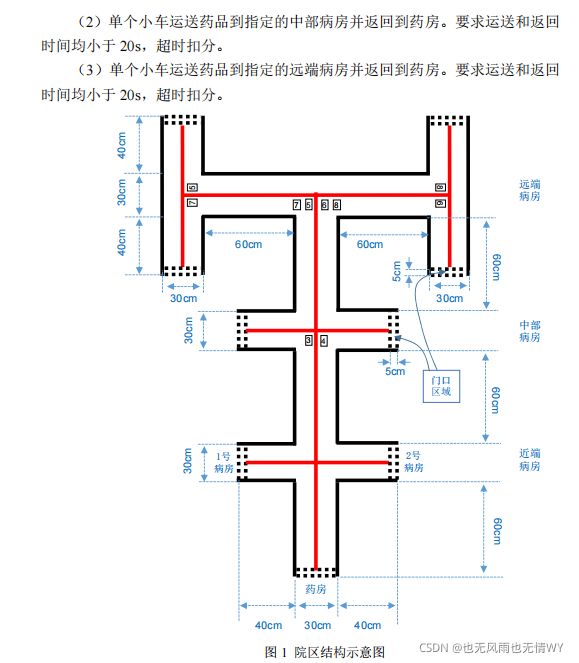
2021全国大学生电子设计竞赛F题智能送药小车
前提:本篇文章重在分享自己的心得与感悟,我们把最重要的部分,摄像头循迹,摄像头数字识别问题都解决了,有两种方案一种是openARTmini摄像头进行数字识别加寻迹,即融合代码。另一种是使用openmv4进行数字识别(使用的是模板匹配),然后利用灰度传感器进行寻迹。因为当时python用得不算很熟,最终我们选择了第二种方案使open MV4实现数字识别,灰度传感器寻迹,在控制智能车运动调试的过程中更加简单。当然赛后我们也尝试了使用open ARTmini的方案,同样操作容易。其次我们下来也做了方案三K210数字识别,数字识别率可达97.8%,使用openmv寻迹。
人们常常希望向成功者获取经验,可是生活中哪有那么多成功者,我想只有失败者才最有发言权,最有经验可以分享吧。因为某些原因我们无缘国奖,但我不甘是失败者,我们为此付出了多少,坚持了多少,只有我们自己知道,只要全力以赴就无所谓失败,也许多年后再回过头来看,想起来这些热血我依然能够热泪盈眶,那就无悔了。
追求卓越,成功才会在不经意见追上你!
目录:
一、题目分析
二、分工以及小车的搭建
三、摄像头部分
四、控制部分
五、联调
六、随谈
七、工程代码
备注:
只需要工程代码的同学(如下是此次电赛过程中所有的代码),建议先看完正文
openMV4模板匹配数字识别方案,本次电赛所有工程代码包括论文报告
https://download.csdn.net/download/cubejava/79012510
openmv巡线代码:
https://download.csdn.net/download/cubejava/41873305
stm32HAL库keil工程(配置freeRTOS,巡线,自动返回,定点停车):
https://download.csdn.net/download/cubejava/41871669
openARTmini巡线和数字识别的融合代码:
https://download.csdn.net/download/cubejava/79012645
小车底板AD原理图和pcb工程:
https://download.csdn.net/download/cubejava/42512528
(可私聊提供技术支持,代码注释完善,若有不懂的可手把手教学)
正文
一、题目


我们是做测控方向的,当时在4号早上7:30左右题目就出来了,随即就有人发在了群里。
看了一下测控方向除了无人机能选的也就D题和F题了,D题是基于互联网的摄像测量系统(D题),我们对这方面的了解不多,没有什么把握,就没敢选,后来听说选D题的在GitHub上能够找到源码,做到后面车调不动时倒有点小后悔,哈哈。
F题经典小车题目,但与往年不同的是今年识别和控制都是重点,必须要先能做到识别,你才能谈接下来的循迹和运动控制。
谈到识别就需要用到摄像头,但之前我们对于摄像头并没有太重视,循迹一般用的都是红外对管,灰度传感器,或者线性CCD就足够了,但是这次的赛到元素存在十字,黑白色块,还要求能自动返回,使用普通的循迹模块就比较吃力了。在电赛备赛期间就做过线性CCD寻迹的智能车,使用的stm32f4,HAL库,cube MX配置的。采取了二值化,动态阈值算法,将CCD采集的值滤波,导入PID,再加入速度环,实现串级PID。也算是练了练手。

工程链接:https://download.csdn.net/download/cubejava/79012959
二、分工以及小车的搭建
我们组三人都没有玩过摄像头,要立马开始现学,我们一开始准备使用openmv进行循迹和数字识别,后来发现我们的openmv的版本不能训练神经网络,必须要openmvplus(可是没有,买又来不急送到),就很难受。
于是我们想采用openARTMiNi进行数字识别加循迹,但由于python用得不熟,当时没有足够的把握能够实现。所以我们采取了折中的办法,即文章开头说的,openMV使用模板匹配识别数字,寻迹使用灰度传感器。
其中一位学长着手完成openMV模板匹配识别数字,另和我则负责stm32f4的工程创建小车的底层代码和运动控制,使用的HAL库。
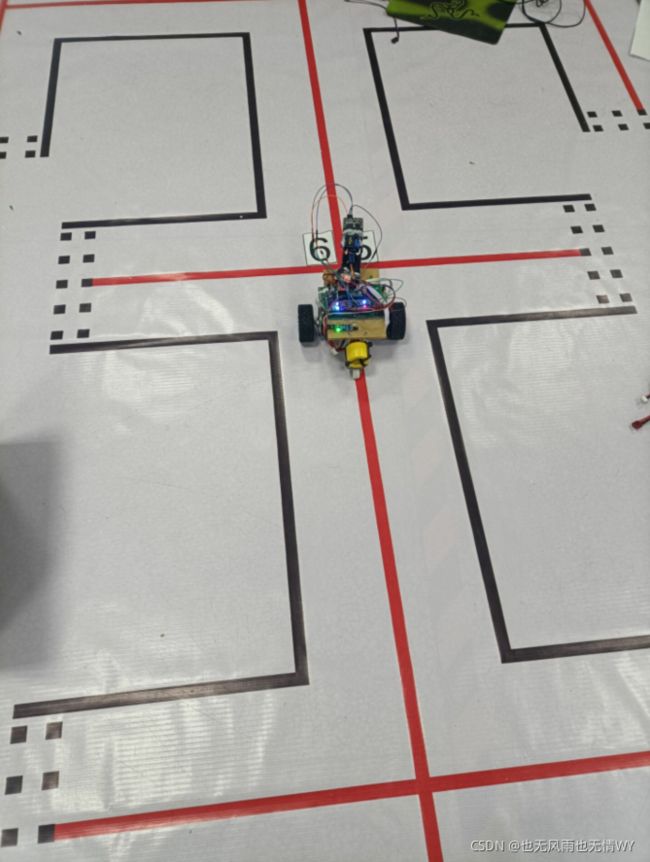
由于之前备赛准备的东西比较充分,所以当天上午就把车给搭建好了,使用平衡小车,加了一个万向轮,转弯差速控制。

小车硬件:
STM32F411CEU6,TB6612,车模(自带霍尔编码器减速电机),LM2596,MPU6050,航模电池,openMV,K210
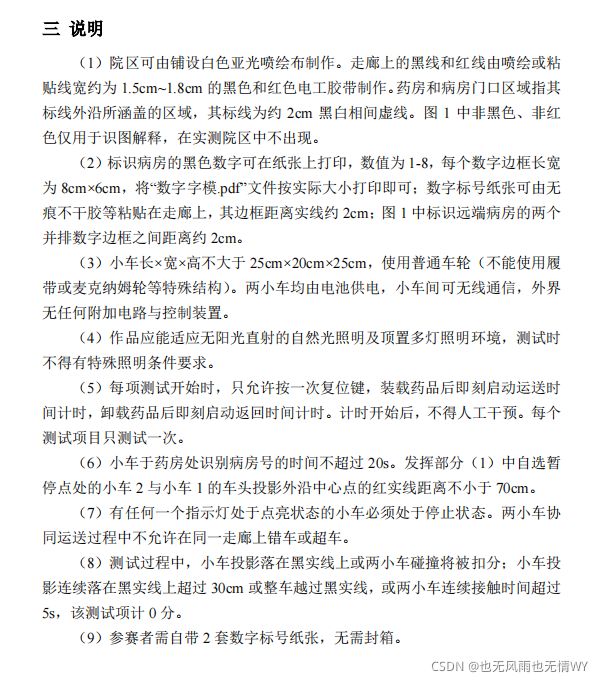
使用AD画小车底板。原理图和PCB如下

小车软件:
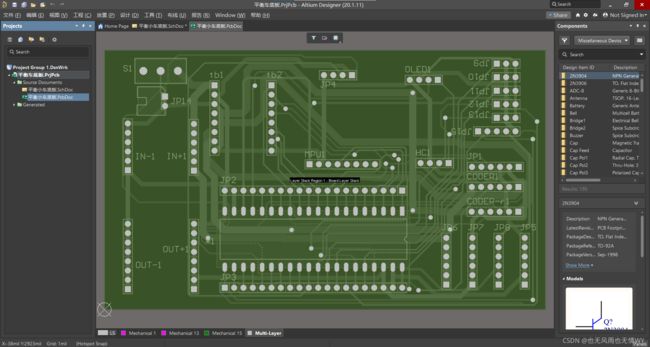
使用的HAL库建立工程,在cubeMX中配置freeRTOS操作系统,

KEIL工程程序代码:

串口重定向printf
/*串口重定向printf*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart6, (uint8_t *)&ch, 1, 1000);
return ch;
}
编码器模式取值
/*编码器模式取值*/
int Read_Encoder(uint8_t TIMX)
{
int Encoder_TIM;
switch(TIMX)
{
case 1: Encoder_TIM= (short)TIM1 -> CNT; TIM1 -> CNT=0;break;
case 2: Encoder_TIM= (short)TIM2 -> CNT; TIM2 -> CNT=0;break;
default: Encoder_TIM=0;
}
return Encoder_TIM;
}
判断mpu6050初始化是否成功
void Mpu6050_Init()
{
while(w_mpu_init() != mpu_ok)
{
printf("0x%x (ID_ERROR)\r\n", w_mpu_init());
HAL_Delay(10);
}
/*DMP初始化*/
dmp_init();
}
初始化程序
int main(void)
{
/*开启编码器计数*/
HAL_TIM_Encoder_Start(&htim1, TIM_CHANNEL_ALL);
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);
/*开启电机PWM输出*/
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);
/*开启舵机的PWM输出*/
HAL_TIM_PWM_Start(&htim5,TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim5,TIM_CHANNEL_4);
/*Enable the USART1 Interrupt*/
HAL_UART_Receive_IT(&huart1,(uint8_t *)&usart6_rxbuff,1);
/*临时*/
Temporary();
Mpu6050_Init();
/*使能定时器4中断*/
HAL_TIM_Base_Start_IT(&htim4);
HAL_UART_Transmit(&huart6, (uint8_t *)&cc, 1,0xFFF);
// TIM3 ->CCR1 = 400;
// TIM3 ->CCR2 = 400;
/* USER CODE END 2 */
/* Call init function for freertos objects (in freertos.c) */
MX_FREERTOS_Init();
HAL_UART_Transmit(&huart6, (uint8_t *)&cc, 1,0xFFF);
/* Start scheduler */
osKernelStart();
while (1)
{
/* USER CODE END WHILE */
// printf("-------------\r\n");
// HAL_Delay(500);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
freeRTOS.C文件中的代码
巡线和功能实现代码均放在freeRTOS.C中

三、摄像头部分
有关摄像头部分,我们在第一天尝试过单使用openMV寻迹,但神经网络训练不了就弃置了。
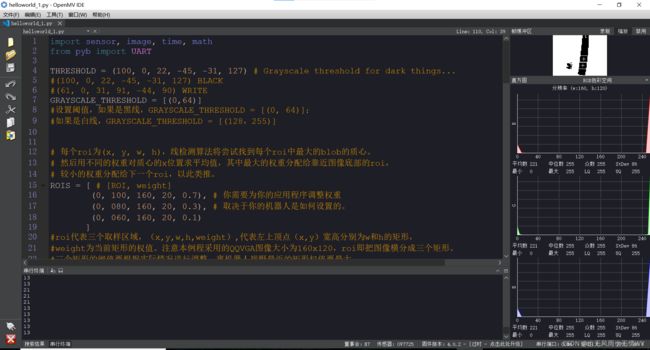
在openmv中处理好数据,可以寻红线,识别十字,识别黑白色块,
传回来的数据:
左右线传回为模拟量,传入单片机,进行pid控制
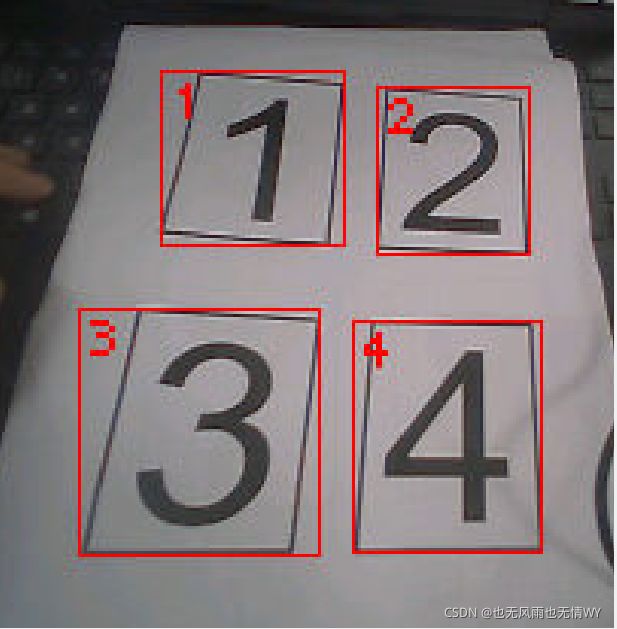
openMV模板匹配识别数字:
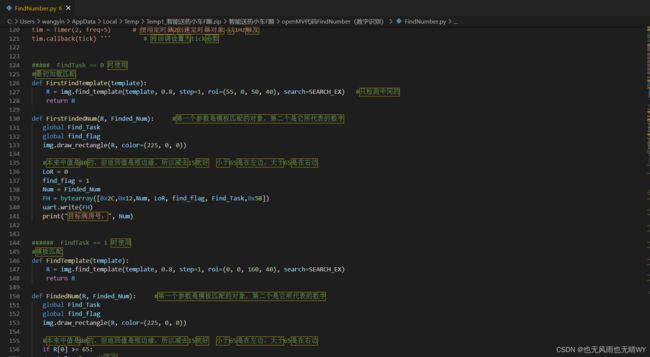
可实现一排识别多个数字。

四、控制部分
控制部分,巡线使用的PD控制
首先速度闭环,PI控制,让小车保持在一个稳定的速度

在速度环上叠加一层方向环,PD控制,巡线
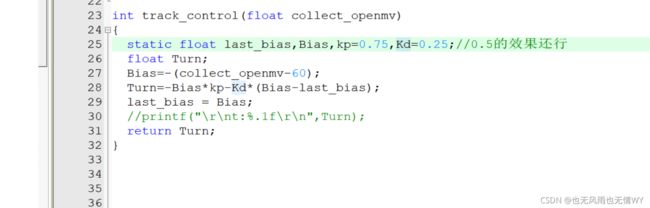
int track_control(float collect_openmv)
{
static float last_bias,Bias,kp=0.75,Kd=0.25;//0.5的效果还行
float Turn;
Bias=-(collect_openmv-60);
Turn=-Bias*kp-Kd*(Bias-last_bias);
last_bias = Bias;
//printf("\r\nt:%.1f\r\n",Turn);
return Turn;
}
小车的自动返回,和判定十字转弯,黑白色块停车使用了标志位,定义数组,根据出栈入栈原理,记录去回的方向。
五、联调
openmv和K210的数据传入单片机
打开串口中断,注意需要写好摄像头和单片机之间的通信协议,如下:

void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) //串口中断,遥控部分。
{
uint16_t tem;
if(huart->Instance == USART1) // 判断是由哪个串口触发的中断
{
//printf("ok");
tem = usart6_rxbuff;
printf("%x\r\n",tem);
if(RxState==0&&tem==0x79)
{
RxState=1;
RxBuffer1[RxCounter1++]=tem;
}
else if(RxState==1)
{
RxBuffer1[RxCounter1++]=tem;
if(RxCounter1>=10||tem == 0x85) //RxBuffer1接受满了,接收数据结束
{
RxState=2;
}
}
else if(RxState==2) //检测是否接受到结束标志
{
if(RxBuffer1[RxCounter1-1] == 0x85)
{
if(RxBuffer1[1] == 0xaa)//识别
{
Flag = Flag + 1;
JG=RxBuffer1[RxCounter1-2];
Turn = RxBuffer1[RxCounter1-3];
if(Flag>3)
{
if(JG>0&&FS==0) {FS = JG;}
printf("\r\n Turn:%d FS:%d \r\n",Turn,FS);
}
}
if(RxBuffer1[1] == 0xbb)//搜线
{
printf("\r\n___sou xian___\r\n");
printf("\r\n Cx:%d, STOP:%d \r\n",Cx,STOP);
Cx=RxBuffer1[RxCounter1-2];
STOP=RxBuffer1[RxCounter1-3];
}
RxCounter1 = 0;
RxState = 0;
}
else //接收错误
{
RxState = 0;
RxCounter1=0;
for(i=0;i<10;i++)
{
RxBuffer1[i]=0x00; //将存放数据数组清零
}
printf("接收错误\r\n");
}
}
if(state==2)
{
if(STOP == 0)
{
state = 0;
}
}
if(state==4)
{
if(STOP == 0)
{
state = 0;
}
}
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&usart6_rxbuff, 1);
}
六、随谈
我们是在结束的前一天晚上完成好的数字识别,离调车整个程序的逻辑就只有一天的时间,说真的,程序写少了,这个程序逻辑真的很难想出来,尤其是在当时已经连续三天每天只睡2个小时左右,头脑非常混沌,呆滞。
还是要多写程序,练习自己写程序的逻辑思维。
结尾:第一次参加国赛,也是第一次参加电赛,本来应该是大一结束就开始了的,电赛延期拖到了大二开学后的一段时间,自己需要学的内容还有很多,好好学习,提升自己的技术,明年省赛继续冲!
七、 工程代码:
openMV4模板匹配数字识别方案,本次电赛所有工程代码包括论文报告
https://download.csdn.net/download/cubejava/79012510
openmv巡线代码:
https://download.csdn.net/download/cubejava/41873305
stm32HAL库keil工程(配置freeRTOS,巡线,自动返回,定点停车):
https://download.csdn.net/download/cubejava/41871669
openARTmini巡线和数字识别的融合代码:
https://download.csdn.net/download/cubejava/79012645
小车底板AD原理图和pcb工程:
https://download.csdn.net/download/cubejava/42512528
备注:这些都是我们没日没夜熬出来的程序代码,花费了很多精力,所以没有免费开源(望理解),设置了付费,不过在博客里也写了相关的思路,可以参考借鉴一些经验,来年省赛加油!!!
现在电赛越来越趋向于视觉和人工智能了,一定要好好学习摄像头,视觉,神经网络。