【STM32G4】备战蓝桥杯嵌入式---实战---第十一届嵌入式省赛
文章目录
- 前言
- 一、题目
- 二、模块初始化以及功能分析
-
- 1.模块的初始化
- 2.模块功能分析
- 三、函数实现
-
-
- 1.void Display(void);
- 2.uint8_t KEY_Scan(uint8_t mode);
- 3.void KEY_Handle(uint8_t key);
- 4.uint16_t Get_ADC(void);
- 5.void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim);
- 6.int main(void);
-
- 初始化;
- while(1);
-
- 总结
前言
为了减少篇幅,各模块的初始化均在模块配置中,可以随时去翻看博客,还有function里面的函数,将不再罗列出来,只是截图展示。
一、题目

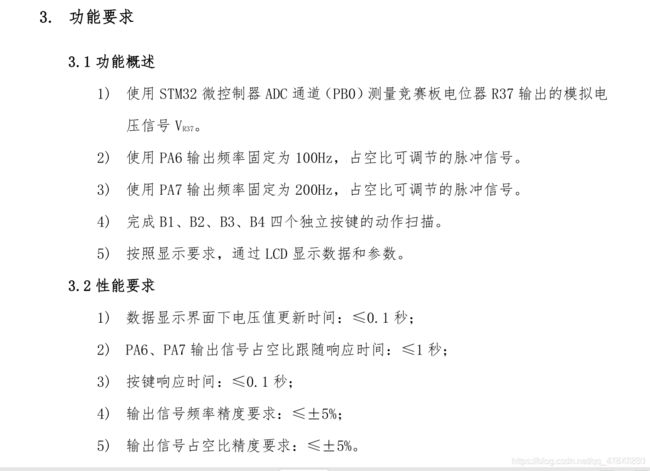

此处少了参数页面的模板,大概就是两个占空比的输出。(题目来于转载)


二、模块初始化以及功能分析
1.模块的初始化
需要用的模块:LCD、四个按键、LED、ADC(PB15)、TIM3。
(TIM3CH1、CH2输出比较模式,请参考
【STM32G4】备战蓝桥杯嵌入式—模块配置—TIM_Output_Compare
【STM32G4】备战蓝桥杯嵌入式—模块配置—TIM_Output_Compare(2))
为了配置这个模式才写的,里面有一些细节,本文只会略提,不懂的参考上文
2.模块功能分析
LCD:显示-----》Display();
按键:对参数进行调整-----》KEY_Handle();KEY_Scan();
LED:提示作用-----》LED();
ADC: 采集电压值-----》Get_ADC();
三、函数实现
1.void Display(void);
Page是表示数据页面Or参数页面
mode
void Display(void)
{
if(Page == 0)
{
LCD_DisplayStringLine(Line1, " Data ");
sprintf((char *)ass," V: %.2f", Volt);
LCD_DisplayStringLine(Line3, ass);
}
else
{
LCD_DisplayStringLine(Line1, " Parameter ");
sprintf((char *)ass," PA6_Duty: %d%%", PA6_Duty);
LCD_DisplayStringLine(Line3, ass);
sprintf((char *)ass," PA7_Duty: %d%%", PA7_Duty);
LCD_DisplayStringLine(Line4, ass);
}
if(mode == 0)
sprintf((char *)ass, " Mode:AUTO");
else
sprintf((char *)ass, " Mode:MANU");
LCD_DisplayStringLine(Line5, ass);
}
2.uint8_t KEY_Scan(uint8_t mode);
uint8_t KEY_Scan(uint8_t mode)
{
static uint8_t flag=1;
if(mode) flag = 1;
if(flag &&(KEY_B1 == 0 || KEY_B2 == 0 || KEY_B3 == 0 || KEY_B4== 0 ))
{
HAL_Delay(10);
flag = 0;
if (KEY_B1 == 0) return B1_Press;
else if (KEY_B2 == 0) return B2_Press;
else if (KEY_B3 == 0) return B3_Press;
else if (KEY_B4 == 0) return B4_Press;
}else if(KEY_B1 == KEY_B2 == KEY_B3 == KEY_B4 == 1) flag = 1;
return 0;
}
3.void KEY_Handle(uint8_t key);
按键处理注意一下更改占空比后,重置一下计数器的值。(逻辑上成立,实际上可以不需要)
void KEY_Handle(uint8_t key)
{
if(key == B1_Press)
{
Page = !Page;
LCD_Clear(White);
}
else if(key == B2_Press && Page == 1)
{
PA6_Duty += 10;
TIM3->CNT = 0;
if(PA6_Duty >= 90) PA6_Duty = 10;
}
else if(key == B3_Press && Page == 1)
{
PA7_Duty += 10;
TIM3->CNT = 0;
if(PA7_Duty >= 90) PA7_Duty = 10;
}
else if(key == B4_Press)
{
mode = !mode;
}
}
4.uint16_t Get_ADC(void);
读取电压值,电压值为Get_ADC()*3.3/4096;
uint16_t Get_ADC(void)
{
uint16_t temp = 0 ;
HAL_ADC_Start(&hadc2);
temp = HAL_ADC_GetValue(&hadc2);
HAL_ADC_Stop(&hadc2);
return temp;
}
5.void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim);
编写中断服务函数。切记到tim.c 的IRQN总中断函数,删除CC1和CC2清除中断标志位的代码。(具体原因参考上文)
中断服务函数,在上文已经讲过,再此需要注意测试的时候是用串口输出,(有示波器的小伙伴可以直接看波形),由于串口打印使得在终端里面停留时间过长,所以会使页面显示迟钝和按键没作用。所以,最后是要注释串口打印的代码哦。
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
if((TIM3->DIER & (0x1 << 1)) && (TIM3->DIER & (0x1 << 2)))
{
HAL_TIM_OC_Stop_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_OC_Stop_IT(&htim3,TIM_CHANNEL_2);
if(__HAL_TIM_GET_FLAG(htim, TIM_IT_CC1))//(TIM3->SR & (0x1 << 1))
{
// sprintf((char *)arr, "CNT: %d, CCR1: %d\r\n", TIM3->CNT,TIM3->CCR1);
// HAL_UART_Transmit(&huart1, arr,sizeof(arr),50);
if(state1)
{
TIM3->CCR1 = TIM3->CCR1 + (uint8_t)(T1*(double)PA6_Duty/100);
state1 = 0;
}
else
{
TIM3->CCR1 = TIM3->CCR1 + T1 - (uint8_t)(T1*(double)PA6_Duty/100);
state1 = 1;
}
TIM3->CCR1 = TIM3->CCR1 % TIM3_Period;
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC1);
}
if(__HAL_TIM_GET_FLAG(htim, TIM_IT_CC2))//(TIM3->SR & (0x1 << 2))
{
// sprintf((char *)arr, "CNT: %d, CCR2: %d \r\n", TIM3->CNT,TIM3->CCR2);
// HAL_UART_Transmit(&huart1, arr,sizeof(arr),50);
if(state2)
{
TIM3->CCR2 = TIM3->CCR2 + (uint8_t)(T2*(double)PA7_Duty/100);
state2 = 0;
}
else
{
TIM3->CCR2 = TIM3->CCR2 + T2 - (uint8_t)(T2*(double)PA7_Duty/100);
state2 = 1;
}
TIM3->CCR2 = TIM3->CCR2 % TIM3_Period;
__HAL_TIM_CLEAR_IT(htim, TIM_IT_CC2);
}
}
HAL_TIM_OC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_OC_Start_IT(&htim3,TIM_CHANNEL_2);
}
6.int main(void);
初始化;
这次把参数定义拿出来看一下咯。


LCD_Init();
LCD_Clear(White);
LCD_SetTextColor(Red);
mode = 0;
Page = 0;//0,数据界面,1,参数界面
PA6_Duty = PA7_Duty = 10;//参数初始化
HAL_TIM_OC_Start_IT(&htim3,TIM_CHANNEL_1);
HAL_TIM_OC_Start_IT(&htim3,TIM_CHANNEL_2);
TIM3->CCR1 = PA6_Duty;
TIM3->CCR2 = PA7_Duty;
TIM3->CNT = 0;
while(1);
Display();
key = KEY_Scan(0);
KEY_Handle(key);
Volt = Get_ADC()*3.3/4096;
if(mode == 0 && (PA6_Duty != (uint8_t)((double)Volt * 100 / 3.3)) && (PA7_Duty != (uint8_t)((double)Volt * 100 / 3.3)))//自动模式
{
PA6_Duty = PA7_Duty = (uint8_t)((double)Volt * 100 / 3.3);
TIM3->CNT = 0;
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(mode == 0)
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_SET);
if(Page == 0)
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_9, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_9, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
主函数就平平无奇了,看过我之前的文章的都应该懂这些套路了。
总结
以上就是本次赛题的程序设计部分(变量定义部分,本人没有罗列出来嗷),总的来说,十一届考的这定时器模式确实有点wu~yu,定时器这个功能本人基本没用过,为了配置也花了大量时间查手册,也另外写了文章介绍。
如果喜欢的话,支持一下,点个赞,评论一下再走吧