使用OpenCV和Python构建自己的车辆检测模型!
概述
- 你对智慧城市的想法感到兴奋吗?如果是的话,你会喜欢这个关于建立你自己的车辆检测系统的教程的
- 在深入实现部分之前,我们将首先了解如何检测视频中的移动目标
- 我们将使用OpenCV和Python构建自动车辆检测器
介绍
我喜欢智慧城市的理念。自动智能能源系统、电网、一键接入端口的想法等等。这是一个令人着迷的概念!老实说,这是一个数据科学家的梦想,我很高兴世界上很多城市都在朝着更智能的方向发展。
智能城市的核心组成部分之一是自动交通管理。这不禁让我思考——我能用我的数据科学知识来建立一个车辆检测模型,在智能交通管理中发挥作用吗?
想想看,如果你能在红绿灯摄像头中集成车辆检测系统,你可以轻松地同时跟踪许多有用的东西:
- 白天交通路口有多少辆车?
- 什么时候交通堵塞?
- 什么样的车辆(重型车辆、汽车等)正在通过交叉路口?
- 有没有办法优化交通,并通过不同的街道进行分配?
还有很多例子就不一一列举。应用程序是无止境的!
我们人类可以很容易地在一瞬间从复杂的场景中检测和识别出物体。然而,将这种思维过程转化为机器的思维,需要我们学习使用计算机视觉算法进行目标检测。
因此在本文中,我们将建立一个自动车辆检测器和计数器模型。以下视频是你可以期待的体验:
https://youtu.be/C_iZ2yivskE
注意:还不懂深度学习和计算机视觉的新概念?以下是两门热门课程,可开启你的深度学习之旅:
- 深度学习基础( https://courses.analyticsvidhya.com/courses/fundamentals-of-deep-learning?utm_source=blog&utm_medium=vehicle-detection-opencv-python )
- 利用深度学习的计算机视觉( https://courses.analyticsvidhya.com/courses/computer-vision-using-deep-learning-version2?utm_source=blog&utm_medium=vehicle-detection-opencv-python )
目录
- 视频中运动目标检测的思想
- 视频中目标检测的真实世界用例
- 视频目标检测的基本概念帧差分图像阈值检测轮廓图像膨胀
- 利用OpenCV构建车辆检测系统
视频中运动目标检测的思想
目标检测是计算机视觉中一个引人入胜的领域。当我们处理视频数据时,它达到了一个全新的水平,复杂性上升了一个等级,但也有回报!
我们可以使用目标检测算法来执行超级有用的高价值任务,如监视、交通管理、打击犯罪等。下面的GIF图演示了这个想法:
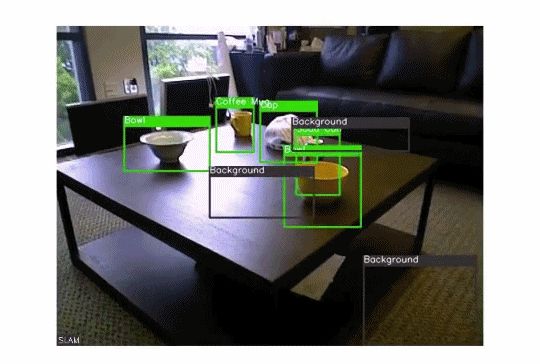
在目标检测中,我们可以执行许多子任务,例如计算目标数量、查找目标的相对大小或查找目标之间的相对距离。这些子任务都很重要,因为它们有助于解决一些最棘手的现实问题。
如果你希望从头开始学习目标检测,我建议你使用以下教程:
- 逐步介绍基本的目标检测算法( https://www.analyticsvidhya.com/blog/2018/10/a-step-by-step-introduction-to-the-basic-object-detection-algorithms-part-1/?utm_source=blog&utm_medium=vehicle-detection-opencv-python )
- 利用SlimYOLOv3进行实时目标检测( https://www.analyticsvidhya.com/blog/2019/08/introduction-slimyolov3-real-time-object-detection/?utm_source=blog&utm_medium=vehicle-detection-opencv-python )
- 其他目标检测物品和资源( https://www.analyticsvidhya.com/blog/tag/object-detection/?utm_source=blog&utm_medium=vehicle-detection-opencv-python )
让我们看看一些令人兴奋的现实世界中的目标检测用例。
视频中目标检测的真实世界用例
如今,视频目标检测正被广泛应用于各个行业。使用案例从视频监控到体育广播,再到机器人导航。
好消息是,在未来的视频目标检测和跟踪用例中,可能性是无穷的。这里我列出了一些有趣的应用程序:
- 人群计数( https://www.analyticsvidhya.com/blog/2019/02/building-crowd-counting-model-python/ )
- 车牌检测与识别
- 运动中的球跟踪( https://www.analyticsvidhya.com/blog/2020/03/ball-tracking-cricket-computer-vision/ )
- 机器人学
- 交通管理(我们将在本文中看到这个想法)
视频目标检测的基本概念
在开始构建视频检测系统之前,你应该知道一些关键概念。一旦你熟悉了这些基本概念,就可以为你选择的任何用例构建自己的检测系统。
那么,你希望如何检测视频中的移动目标?
我们的目标是捕捉运动物体的坐标并在视频中突出显示该物体。请考虑下面视频中的这一帧:
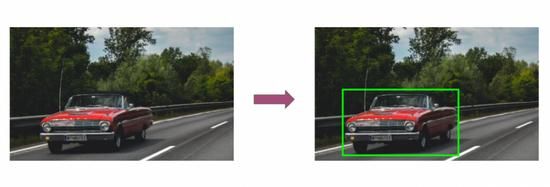
我们希望我们的模型能够检测视频中的运动目标,如上图所示。检测到移动的汽车,并在汽车周围创建一个边界框。
解决这个问题有多种方法。你可以为目标检测训练一个深度学习模型,也可以选择一个预先训练好的模型并根据你的数据对其进行微调。然而,这些方法都是有监督的学习方法,需要标记数据来训练目标检测模型。
在本文中,我们将 重点讨论视频中无监督的目标检测方法,即不使用任何标记数据的目标检测。我们将使用 帧差分技术 。让我们了解它是如何工作的!
帧差分
视频是一组按正确顺序堆叠在一起的帧。所以,当我们看到一个物体在视频中移动时,这意味着这个物体在每一个连续的帧上都处于不同的位置。

如果我们假设除了该目标之外,在一对连续的帧中没有其他物体移动,那么第一帧与第二帧的像素差将突出显示移动目标的像素。现在,我们得到了移动物体的像素和坐标。这就是帧差分法的工作原理。
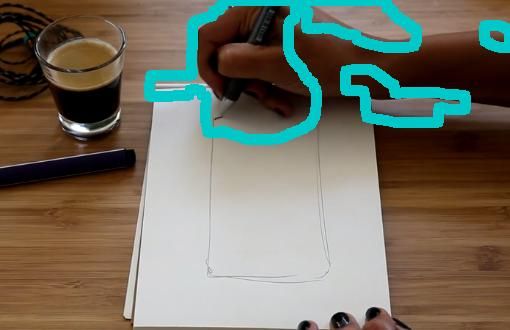
举个例子。考虑视频中的以下两个帧:
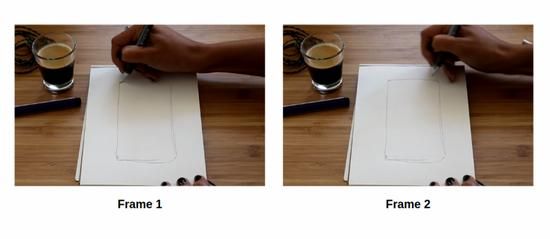
你能看出这两帧的区别吗?
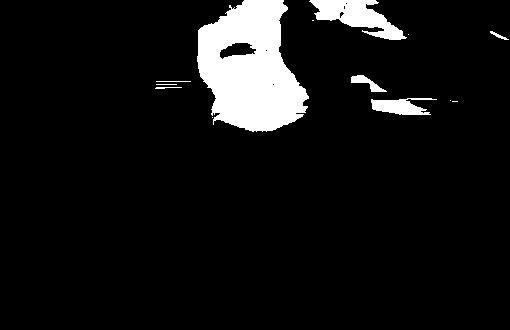
握笔的手的位置从第1帧变为第2帧。其余的物体根本没有移动。所以,正如我前面提到的,为了定位移动目标,我们将执行帧差分。结果如下:

你可以看到高亮或白色区域,这是手最初出现的地方。除此之外,记事本的边缘也会突出显示一点。这可能是由于手的移动改变了光照。建议不要对静止物体进行不必要的检测。因此,我们需要对帧执行某些图像预处理步骤。
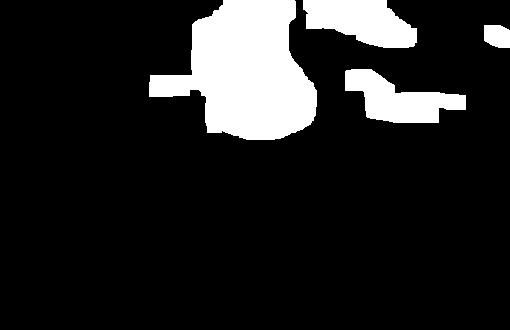
图像阈值
在这种方法中,灰度图像的像素值根据阈值被指定为表示黑白颜色的两个值之一。因此,如果一个像素的值大于一个阈值,它被赋予一个值,否则它被赋予另一个值。
在本例中,我们将对上一步骤中帧差分的输出图像应用图像阈值:
你可以看到,不需要的高亮区域的大部分已经消失了。高亮显示的“记事本”边缘不再可见。合成的图像也可以称为二值图像,因为其中只有两种颜色。在下一个步骤中,我们将看到如何捕获这些高亮区域。
检测轮廓
轮廓用于识别图像中具有相同颜色或强度的区域的形状。轮廓就是目标区域周围的边界。因此,如果我们在阈值步骤后对图像应用轮廓检测,我们将得到以下结果:
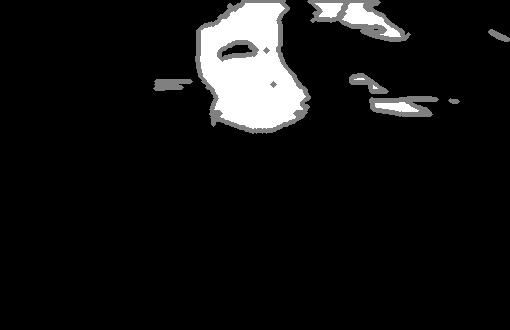
白色区域被浅灰色的边界所包围,这些边界就是轮廓。我们很容易得到这些轮廓的坐标。这意味着我们可以得到高亮区域的位置。
请注意,有多个高亮显示区域,每个区域由轮廓包围。在我们的例子中,具有最大面积的轮廓是我们期望的区域。因此,轮廓最好尽可能少。
在上图中,仍然有一些不必要的白色区域碎片。还有改进的余地。我们的想法是合并附近的白色区域以获得更少的轮廓,为此,我们可以使用另一种称为图像膨胀的技术。
图像膨胀
这是对图像的卷积操作,其中核心(矩阵)传递到整个图像上。为了给你直觉,右边的图像是左边图像的放大版本:

所以,让我们对我们的图像进行图像膨胀,然后我们将再次找到轮廓:
事实证明,许多支离破碎的区域已经相互融合。现在我们可以再次在这张图片中找到轮廓:
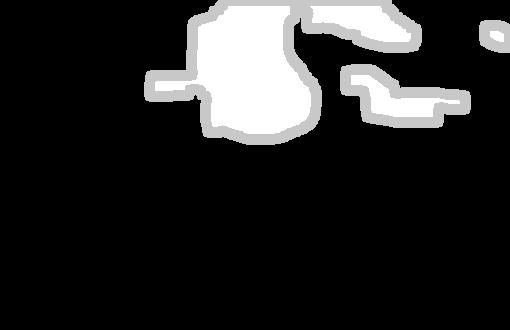
在这里,我们只有四个候选轮廓,从中我们可以选择一个有最大面积的轮廓。也可以在原始帧上绘制这些轮廓,以查看轮廓围绕移动目标的情况:
用OpenCV和Python构建车辆检测系统
我们准备建立我们的车辆检测系统!在这个实现中,我们将大量使用计算机视觉库OpenCV(4.0.0版)( https://www.analyticsvidhya.com/blog/2019/03/opencv-functions-computer-vision-python/?utm_source=blog&utm_medium=vehicle-detection-opencv-python ) 。我们先导入所需的库和模块。
导入库
import os import re import cv2 # opencv library import numpy as np from os.path import isfile, join import matplotlib.pyplot as plt
导入视频帧
请从此链接下载原始视频的帧。
https://drive.google.com/file/d/1P0yiO5KlnU8dGgB_L68KB_hjIvUec55f/view
将框架保存在工作目录中名为“frames”的文件夹中。从该文件夹中,我们将导入帧并将其保存在列表中:
# get file names of the frames
col_frames = os.listdir('frames/')
# sort file names
col_frames.sort(key=lambda f: int(re.sub('\D', '', f)))
# empty list to store the frames
col_images=[]
for i in col_frames:
# read the frames
img = cv2.imread('frames/'+i)
# append the frames to the list
col_images.append(img)
数据探索
让我们显示两个连续的帧:
# plot 13th frame
i = 13
for frame in [i, i+1]:
plt.imshow(cv2.cvtColor(col_images[frame], cv2.COLOR_BGR2RGB))
plt.title("frame: "+str(frame))
plt.show()
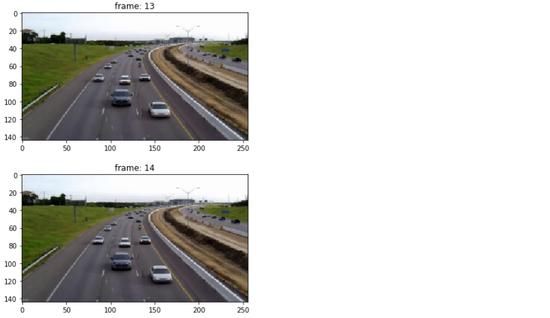
很难在这两个框架中找到区别,不是吗?如前所述,获取两个连续帧的像素值的差值将有助于我们观察移动目标。那么,让我们在上面两个帧上使用该技术:
# convert the frames to grayscale grayA = cv2.cvtColor(col_images[i], cv2.COLOR_BGR2GRAY) grayB = cv2.cvtColor(col_images[i+1], cv2.COLOR_BGR2GRAY) # plot the image after frame differencing plt.imshow(cv2.absdiff(grayB, grayA), cmap = 'gray') plt.show()
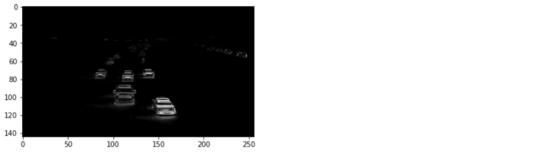
现在我们可以清楚地看到第13帧和第14帧中的移动目标。其他没有移动的东西都被减去了。
图像预处理
让我们看看对上面的图像应用阈值后会发生什么:
diff_image = cv2.absdiff(grayB, grayA) # perform image thresholding ret, thresh = cv2.threshold(diff_image, 30, 255, cv2.THRESH_BINARY) # plot image after thresholding plt.imshow(thresh, cmap = 'gray') plt.show()
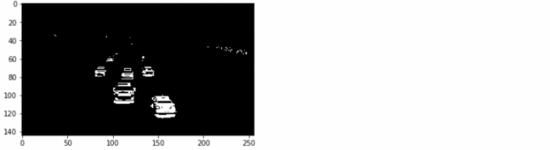
现在,移动物体(车辆)看起来更像我们期望看到的那样了,大部分噪音(不希望出现的白色区域)都消失了。但是,突出显示的区域有点零碎。因此,我们可以对该图像应用图像膨胀:
# apply image dilation kernel = np.ones((3,3),np.uint8) dilated = cv2.dilate(thresh,kernel,iterations = 1) # plot dilated image plt.imshow(dilated, cmap = 'gray') plt.show()
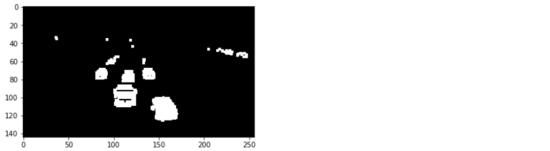
移动的物体有更多的实心高亮区域。希望帧中每个目标的轮廓数不超过3。
但是,我们不会使用整个框架来检测移动的车辆。我们将首先选择一个区域,如果车辆进入该区域,则仅检测到该区域。
那么,让我向你展示我们将会使用的区域:
# plot vehicle detection zone plt.imshow(dilated) cv2.line(dilated, (0, 80),(256,80),(100, 0, 0)) plt.show()
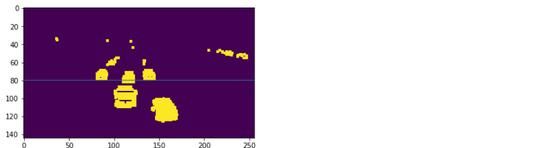
水平线y = 80以下的区域是我们的车辆检测区域。我们将只检测在这个区域发生的任何移动。你还可以创建自己的检测区。
现在让我们在上述帧的检测区域中找到轮廓:
# find contours contours, hierarchy = cv2.findContours(thresh.copy(),cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
上面的代码查找整个图像中的所有轮廓,并将它们保存在变量"contours"中。由于我们只需要找到检测区域中存在的轮廓,我们将对发现的轮廓进行两次检查。
第一个检查是轮廓左上角的y坐标是否应大于等于80(我这里包括另一个检查,x坐标小于等于200)。另一个检查是轮廓的面积应该大于等于25。在cv2.courtoArea()函数的帮助下,你可以找到轮廓区域。
valid_cntrs = []
for i,cntr in enumerate(contours):
x,y,w,h = cv2.boundingRect(cntr)
if (x <= 200) & (y >= 80) & (cv2.contourArea(cntr) >= 25):
valid_cntrs.append(cntr)
# count of discovered contours
len(valid_cntrs)
接下来,让我们绘制轮廓和原始帧:
dmy = col_images[13].copy() cv2.drawContours(dmy, valid_cntrs, -1, (127,200,0), 2) cv2.line(dmy, (0, 80),(256,80),(100, 255, 255)) plt.imshow(dmy) plt.show()

太酷了!只有位于检测区域内的车辆轮廓可见。这就是我们在整个画面中检测车辆的方法
视频中的车辆检测
现在是时候对所有帧应用相同的图像变换和预处理操作,并找到所需的轮廓。重申一下,我们将遵循以下步骤:
- 对每对连续帧应用帧差分
- 对上一步的输出图像应用图像阈值
- 对上一步的输出图像进行图像放大
- 在上一步的输出图像中查找轮廓
- 检测区域出现的候选轮廓
- 保存帧与最终轮廓
# kernel for image dilation
kernel = np.ones((4,4),np.uint8)
# font style
font = cv2.FONT_HERSHEY_SIMPLEX
# directory to save the ouput frames
pathIn = "contour_frames_3/"
for i in range(len(col_images)-1):
# frame differencing
grayA = cv2.cvtColor(col_images[i], cv2.COLOR_BGR2GRAY)
grayB = cv2.cvtColor(col_images[i+1], cv2.COLOR_BGR2GRAY)
diff_image = cv2.absdiff(grayB, grayA)
# image thresholding
ret, thresh = cv2.threshold(diff_image, 30, 255, cv2.THRESH_BINARY)
# image dilation
dilated = cv2.dilate(thresh,kernel,iterations = 1)
# find contours
contours, hierarchy = cv2.findContours(dilated.copy(), cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
# shortlist contours appearing in the detection zone
valid_cntrs = []
for cntr in contours:
x,y,w,h = cv2.boundingRect(cntr)
if (x <= 200) & (y >= 80) & (cv2.contourArea(cntr) >= 25):
if (y >= 90) & (cv2.contourArea(cntr) < 40):
break
valid_cntrs.append(cntr)
# add contours to original frames
dmy = col_images[i].copy()
cv2.drawContours(dmy, valid_cntrs, -1, (127,200,0), 2)
cv2.putText(dmy, "vehicles detected: " + str(len(valid_cntrs)), (55, 15), font, 0.6, (0, 180, 0), 2)
cv2.line(dmy, (0, 80),(256,80),(100, 255, 255))
cv2.imwrite(pathIn+str(i)+'.png',dmy)
准备视频
在这里,我们为所有帧中的所有移动车辆添加了轮廓。现在是时候堆叠帧并创建视频了:
# specify video name pathOut = 'vehicle_detection_v3.mp4' # specify frames per second fps = 14.0
接下来,我们将阅读列表中的最后一帧:
frame_array = []
files = [f for f in os.listdir(pathIn) if isfile(join(pathIn, f))]
files.sort(key=lambda f: int(re.sub('\D', '', f)))
for i in range(len(files)):
filename=pathIn + files[i]
#read frames
img = cv2.imread(filename)
height, width, layers = img.shape
size = (width,height)
#inserting the frames into an image array
frame_array.append(img)
最后,我们将使用以下代码制作目标检测视频:
out = cv2.VideoWriter(pathOut,cv2.VideoWriter_fourcc(*'DIVX'), fps, size)
for i in range(len(frame_array)):
# writing to a image array
out.write(frame_array[i])
out.release()
恭喜你学会了车辆目标检测!
尾注
在本教程中,我们学习了如何使用帧差分技术在视频中执行移动目标检测。我们还讨论了目标检测和图像处理的一些概念。然后我们用OpenCV建立了自己的运动目标检测系统。
我确信,使用在本文中学习的技术和方法,你将构建自己版本的目标检测系统。
源码获取加群:1136192749