OpenCV学习笔记
OpenCV学习笔记
1 导入图像视频和网络摄像头
首先包含三个常用的头文件和IO库
#include 然后需要使用命名空间
using namespace cv;
using namespace std;
1.1 图像
int main()
{
// 首先需要定义图像文件路径,使用string类型来存储
string path = "res/test_image.jpg";
// 用Mat类型读取图像
Mat img = imread(path);
// 显示图像
imshow("图像", img);
// 使用waitKey进行一个延时,否则图像会立即关闭。0为无穷大,即不会关闭。
waitKey(0);
return 0;
}
1.2 视频
int main()
{
// 首先需要定义视频文件路径,使用string类型来存储
string path = "res/test_video.mp4";
// 构造VideoCapture类型对象
VideoCapture cap(path);
// 单帧图像
Mat img;
// 对于视频来说需要捕获所有帧并显示,所以需要while循环。
while(1)
{
// 读取一帧图像
cap.read(img);
// 显示图像
imshow("视频", img);
// 这时需要延时,否则视频非常快
waitKey(20);
}
return 0;
}
视频结束后会抛出错误(无法读取文件),原因为视频结束后没有图像送入img所以报错。
1.3 摄像头
int main()
{
// 摄像头不需要路径,需要输入相机的ID号,剩下的和读取视频一样
VideoCapture cap(0);
cap.set(CAP_PROP_FRAME_WIDTH, 640);
cap.set(CAP_PROP_FRAME_HEIGHT, 480);
Mat img;
while (true)
{
cap.read(img);
imshow("摄像头", img);
waitKey(1);
}
return 0;
}
2 基本函数
前文包含的头文件#include 就是图像处理的头文件
int main()
{
// 原始图像
string path = "res/test_image.jpg";
Mat img = imread(path);
imshow("Image", img);
Mat imgGray;
// “convert”,即为转换图像的颜色空间,这里将彩色图想转换为灰度图像
cvtColor(img, imgGray, COLOR_BGR2GRAY);
imshow("Image Gray", imgGray);
Mat imgBlur;
// 添加高斯模糊(7*7)
GaussianBlur(imgGray, imgBlur, Size(7, 7), 5, 0);
imshow("Image Blur", imgBlur);
Mat imgCanny;
// 边缘检测,通常在边缘检测前对图像进行一次高斯模糊(可以自行对比有什么区别)
Canny(imgBlur, imgCanny, 25,75);
imshow("Image Canny", imgCanny);
// 有时进行边缘检测的时候,没有被完全填充,或者无法正确检测,可以用膨胀和腐蚀
Mat imgDil, imgErode;
// 创建一个用于膨胀和腐蚀的内核,后面的数字越大膨胀的越多(数字要用奇数)
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3));
// 膨胀
dilate(imgCanny, imgDil, kernel);
imshow("Image Dilation", imgDil);
// 腐蚀
erode(imgDil, imgErode, kernel);
imshow("Image Erode", imgErode);
waitKey(0);
}
运行结果:
3 对图像进行伸缩和剪裁
int main()
{
// 原始图像
string path = "res/test_image.jpg";
Mat img = imread(path);
imshow("Image", img);
// 伸缩
Mat imgResize;
// 使用size方法查看图像尺寸
cout << img.size() << endl;
// 可以调整成具体的大小
resize(img, imgResize, Size(400,600));
imshow("Image Resize Size()", imgResize);
// 也可以调整缩放比例fxfy
resize(img, imgResize, Size(),0.5,0.5);
imshow("Image Resize ", imgResize);
// 裁剪
Mat imgCrop;
// 矩形数据类型,前两个参数为剪裁起点(左上角 x = 0, y = 0),后两个参数为宽和高
Rect roi(200, 100, 200, 200);
// 使用刚刚定义的矩形对图像进行裁剪
imgCrop = img(roi);
imshow("Image Crop", imgCrop);
waitKey(0);
}
运行结果:
4 绘制形状和文字
下文中,使用Point()定义一个点,使用Scalar()定义一个标量(颜色)
绘制形状和文字所用函数中最后两个参数均为颜色和厚度(FILLED为填充),不再重复说明
int main()
{
// 创建一个空白图像,512*512大小,8位3通道(CV_8UC3),白色(255,255,255)
Mat img(512, 512, CV_8UC3, Scalar(255, 255, 255));
// 画圆 传入圆心,半径
circle(img, Point(256, 256), 155, Scalar(0, 69, 255),FILLED);
// 画矩形 传入左上角与右下角点的坐标
rectangle(img, Point(130, 226), Point(382, 286), Scalar(255, 255, 255), FILLED);
// 画线 传入起点和终点的坐标
line(img, Point(130, 296), Point(382, 296), Scalar(255, 255, 255), 2);
// 绘制文字 传入文字,左上角坐标,字体,比例
putText(img, "OpenCV Learning", Point(150, 262), FONT_HERSHEY_COMPLEX, 0.75, Scalar(0, 69, 255),2);
imshow("Image", img);
waitKey(0);
}
运行结果:

5 透视变换
int main()
{
string path = "res/cards.jpg";
Mat img = imread(path);
// 可以使用画图工具获取到点坐标,使用Point2f创建浮点数
Point2f src[4] = { {529,142},{771,190},{405,395},{674,457} };
// 变换后的大小
float w = 250, h = 350;
Point2f dst[4] = { {0.0f,0.0f},{w,0.0f},{0.0f,h},{w,h} };
//创建变换矩阵
Mat matrix = getPerspectiveTransform(src, dst);
// 透视变换
Mat imgWarp;
warpPerspective(img, imgWarp, matrix, Size(w, h));
imshow("Image Warp", imgWarp);
// 显示四个顶点
for (int i = 0; i < 4; i++)
{
circle(img, src[i], 10, Scalar(0, 0, 255), FILLED);
}
imshow("Image", img);
waitKey(0);
}
可以看到,成功将图形矫正
6 颜色识别
颜色识别需要设定选取好的hsv三个通道的最大值和最小值
int main()
{
string path = "res/lambo.jpg";
Mat img = imread(path);
imshow("Image", img);
// 在HSV空间中查找颜色更加容易,所以先转化为HSV颜色空间
Mat imgHSV;
cvtColor(img, imgHSV, COLOR_BGR2HSV);
imshow("Image HSV", imgHSV);
// 定义选取好的六个值
int hmin = 0, smin = 110, vmin = 153;
int hmax = 19, smax = 240, vmax = 255;
// 定义下限和上限
Scalar lower(hmin, smin, vmin);
Scalar upper(hmax, smax, vmax);
//创建遮罩
Mat mask;
inRange(imgHSV, lower, upper, mask);
imshow("Image Mask", mask);
waitKey(0);
}
运行查看效果
上面的值可以使用Trackbar试出来,替换一张图片再次尝试
int main()
{
string path = "res/shapes.jpg";
Mat img = imread(path);
imshow("Image", img);
// 在HSV空间中查找颜色更加容易,所以先转化为HSV颜色空间
Mat imgHSV;
cvtColor(img, imgHSV, COLOR_BGR2HSV);
imshow("Image HSV", imgHSV);
// 设定初始值
int hmin = 0, smin = 0, vmin = 0;
int hmax = 179, smax = 255, vmax = 255;
// 创建遮罩
Mat mask;
// 定义窗口名
namedWindow("Trackbars", (640, 200));
// 创建Trackbar
createTrackbar("Hue Min", "Trackbars", &hmin, 179);
createTrackbar("Hue Max", "Trackbars", &hmax, 179);
createTrackbar("Sat Min", "Trackbars", &smin, 255);
createTrackbar("Sat Max", "Trackbars", &smax, 255);
createTrackbar("Val Min", "Trackbars", &vmin, 255);
createTrackbar("Val Max", "Trackbars", &vmax, 255);
while(1)
{
Scalar lower(hmin, smin, vmin);
Scalar upper(hmax, smax, vmax);
inRange(imgHSV, lower, upper, mask);
imshow("Image Mask", mask);
waitKey(1);
}
}
初始值是这样的
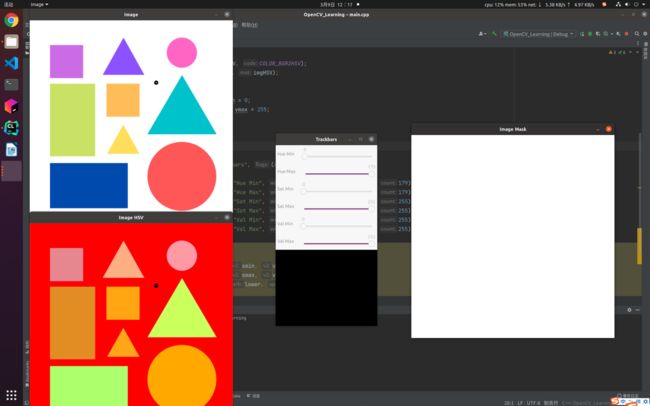
因为这张图里都是确定的颜色,所以只需要拖动前两行即可筛选出想要的颜色

7 形状识别
本节将学习如何检测圆形、正方形、矩形、三角形这些形状,和识别出图像中的轮廓
7.1 预处理
首先对图像进行预处理得到边缘,依次进行灰度处理、高斯模糊、边缘检测、膨胀、腐蚀。详见
int main()
{
// 原始图像
string path = "res/shapes.jpg";
Mat img = imread(path);
imshow("Image", img);
// 在识别形状之前需要对图片进行一系列的预处理
// 灰度处理
Mat imgGray;
cvtColor(img, imgGray, COLOR_BGR2GRAY);
// 高斯模糊
Mat imgBlur;
GaussianBlur(imgGray, imgBlur, Size(3, 3), 3, 0);
// 边缘检测
Mat imgCanny;
Canny(imgBlur, imgCanny, 25,75);
// 膨胀和腐蚀
Mat imgDil, imgErode;
// 创建一个用于膨胀和腐蚀的内核,后面的数字越大膨胀的越多(数字要用奇数)
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3));
// 膨胀
dilate(imgCanny, imgDil, kernel);
// 腐蚀
erode(imgDil, imgErode, kernel);
// // 在这里进行边缘检测
// getContours(imgDil,img);
imshow("Image", img);
imshow("Image Gray", imgGray);
imshow("Image Blur", imgBlur);
imshow("Image Canny", imgCanny);
imshow("Image Dil", imgDil);
waitKey(0);
}
从处理后的图像可以看到,单单使用边缘检测,三角形的轮廓线断断续续,会对之后的识别造成影响。经过膨胀之后的图像轮廓线是实线,边缘特性更好。

关闭主函数中无用的输出,只留下imshow("Image", img);,然后去除getContours(imgDil,img);的注释,再进行下一步。
7.2 找到轮廓
根据边缘找到轮廓
void getContours(Mat img_input, Mat img_output)
{
/*
* contours是一个双重向量,向量内每个元素保存了一组由连续的Point点构成的点的集合的向量,每一组Point点集就是一个轮廓。有多少轮廓,向量contours就有多少元素。
* 相当于创建了这样一个向量{{Point(),Point()},{},{}}
* */
vector<vector<Point>> contours;
/*
* hierarchy向量内每个元素保存了一个包含4个int整型的数组。向量hiararchy内的元素和轮廓向量contours内的元素是一一对应的,向量的容量相同。
* hierarchy向量内每一个元素的4个int型变量——hierarchy[i][0] ~ hierarchy[i][3],分别表示第i个轮廓的后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号。
* 如果当前轮廓没有对应的后一个轮廓、前一个轮廓、父轮廓或内嵌轮廓的话,则hierarchy[i][0] ~ hierarchy[i][3]的相应位被设置为默认值-1。
* */
vector<Vec4i> hierarchy;
/*
* 找到轮廓
* 第一个参数:单通道图像矩阵,可以是灰度图,但更常用的是二值图像,一般是经过Canny、拉普拉斯等边缘检测算子处理过的二值图像;
* 第二个参数:contours (前文介绍过)
* 第三个参数:hierarchy(前文介绍过)
* 第四个参数:轮廓的检索模式
* 取值一:CV_RETR_EXTERNAL 只检测最外围轮廓,包含在外围轮廓内的内围轮廓被忽略
* 取值二:CV_RETR_LIST 检测所有的轮廓,包括内围、外围轮廓,但是检测到的轮廓不建立等级关系,彼此之间独立,没有等级关系,这就意味着这个检索模式下不存在父轮廓或内嵌轮廓,所以hierarchy向量内所有元素的第3、第4个分量都会被置为-1,具体下文会讲到
* 取值三:CV_RETR_CCOMP 检测所有的轮廓,但所有轮廓只建立两个等级关系,外围为顶层,若外围内的内围轮廓还包含了其他的轮廓信息,则内围内的所有轮廓均归属于顶层
* 取值四:CV_RETR_TREE 检测所有轮廓,所有轮廓建立一个等级树结构。外层轮廓包含内层轮廓,内层轮廓还可以继续包含内嵌轮廓。
* 第五个参数:轮廓的近似方法
* 取值一:CV_CHAIN_APPROX_NONE 保存物体边界上所有连续的轮廓点到contours向量内
* 取值二:CV_CHAIN_APPROX_SIMPLE 仅保存轮廓的拐点信息,把所有轮廓拐点处的点保存入contours向量内,拐点与拐点之间直线段上的信息点不予保留
* 取值三和四:CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
* 第六个参数:Point偏移量,所有的轮廓信息相对于原始图像对应点的偏移量,相当于在每一个检测出的轮廓点上加上该偏移量,且Point可以是负值。不填为默认不偏移Point()
* */
findContours(img_input, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
/*
* 第一个参数:指明在哪幅图像上绘制轮廓。image为三通道才能显示轮廓
* 第二个参数:contours
* 第三个参数:指定绘制哪条轮廓,如果是-1,则绘制其中的所有轮廓
* 第四个参数:轮廓线颜色
* 第五个参数:轮廓线的宽度,如果是-1(FILLED),则为填充
* */
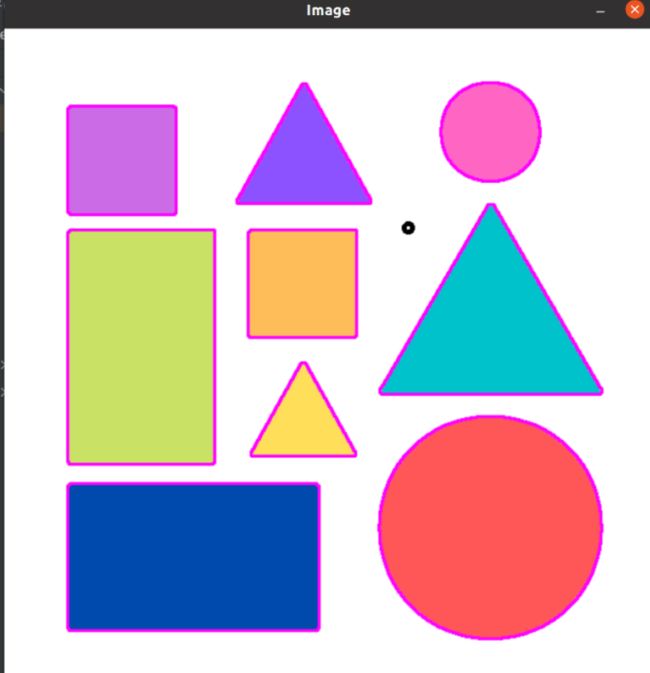
drawContours(img_output, contours, -1, Scalar(255, 0, 255), 2);
}
可以看到,图像轮廓被正确地识别出来了。

7.3 去除噪声
假设图像中最小的黑色圆圈为噪声,我们要将其滤除,所以需要判断轮廓大小并对其筛选。
void getContours(Mat img_input, Mat img_output)
{
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(img_input, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// 假设图像中有噪声,需要将其过滤
for (int i = 0; i < contours.size(); i++)
{
//检测轮廓大小
int area = contourArea(contours[i]);
cout << area << endl;
if (area > 1000)
{
drawContours(img_output, contours, i, Scalar(255, 0, 255), 2);
}
}
}
可以看到,黑色噪声成功被滤除
7.4 识别形状
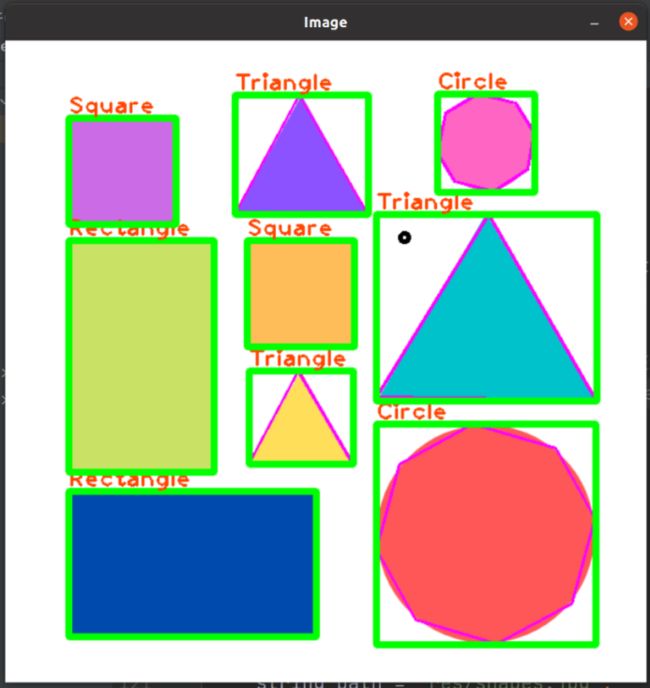
下一步我们要找到这些轮廓的角点,并对角点的数量进行判断,例如三角形就是3,四边形就是4,圆形可能七八个,并同时绘制出边界框与形状名称。
void getContours(Mat img_input, Mat img_output)
{
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(img_input, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
// 不全输出,在下文只输出角点
// drawContours(img_output, contours, -1, Scalar(255, 0, 255), 2);
// 定义轮廓,大小与contours相同,但内层向量中只有角点(例如三角形就是3,四边形就是4,圆形可能七八个)
vector<vector<Point>> contours_corners(contours.size());
// 定义边界框,大小与contours相同
vector<Rect> bounding_box(contours.size());
// 定义图形形状字符串
string object_type;
for (int i = 0; i < contours.size(); i++)
{
int contour_area = contourArea(contours[i]);
cout << contour_area << endl;
if (contour_area > 1000)
{
// 计算每个轮廓的周长
float contour_perimeter = arcLength(contours[i], true);
// 使用DP算法计算出轮廓点的个数,规则为周长*0.02
approxPolyDP(contours[i], contours_corners[i], 0.02 * contour_perimeter, true);
cout << contours_corners[i].size() << endl;
// 找出边界框
bounding_box[i] = boundingRect(contours_corners[i]);
// 通过判断角点的数量来确定是什么形状
int object_corners = (int)contours_corners[i].size();
if(object_corners == 3)
{
object_type = "Triangle";
}
else if(object_corners == 4)
{
// 通过计算宽高比来区分正方形和矩形
float aspect_ratio = (float)bounding_box[i].width / (float)bounding_box[i].height;
cout << aspect_ratio << endl;
// 宽高比在0.95~1.05范围内算作正方形
if (aspect_ratio > 0.95 && aspect_ratio < 1.05)
{
object_type = "Square";
}
// 其余的算作矩形
else
{
object_type = "Rectangle";
}
}
else if(object_corners > 4)
{
object_type = "Circle";
}
// 只绘制角点之间的边框线
drawContours(img_output, contours_corners, i, Scalar(255, 0, 255), 2);
// 绘制矩形,bounding_box[i].tl()左上角,bounding_box[i].br()右下角
rectangle(img_output, bounding_box[i].tl(), bounding_box[i].br(), Scalar(0, 255, 0), 5);
// 绘制文字(什么形状),绘制在边框的左上角再往上5像素
putText(img_output, object_type, Point(bounding_box[i].x, bounding_box[i].y - 5 ), FONT_HERSHEY_PLAIN, 1.5, Scalar(0, 69, 255), 2);
}
}
}
可以看到,不同形状的物体被成功识别出。
8 人脸检测
人脸检测需要包含#include 头文件
使用OpenCV自带的Haar特征分类器进行检测。Haar特征分类器就是一个XML文件,该文件中会描述人体各个部位的Haar特征值。包括人脸、眼睛、嘴唇等等。通常被放置在一个叫haarcascades的目录下(全盘搜索一下就能找到),有以下这些:
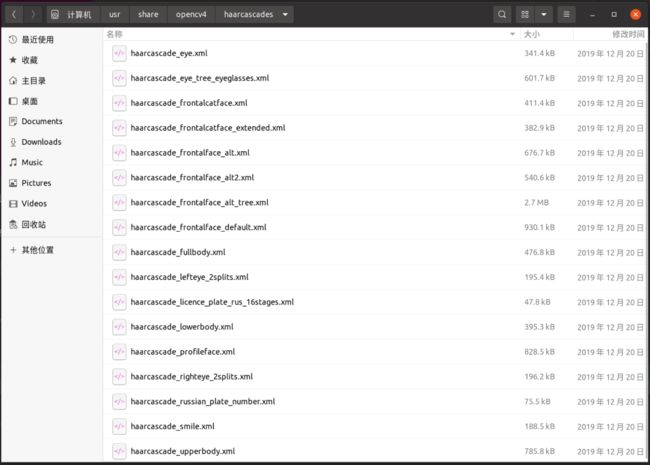
根据命名可以知道各个分类器的用途。
int main()
{
string path = "res/face.jpg";
Mat img = imread(path);
// 编写级联分类器
CascadeClassifier faceCascade;
// 加载训练好的模型(族特征数据库)这里的路径请自行修改
faceCascade.load("/usr/share/opencv4/haarcascades/haarcascade_frontalface_default.xml");
if (faceCascade.empty())
{
cout << "XML file not loaded" << endl;
}
// 创建一个矩形向量
vector<Rect> faces;
/*
* 族检测算法
* 参数1:image--待检测图片,一般为灰度图像加快检测速度;
* 参数2:objects--被检测物体的矩形框向量组;
* 参数3:scaleFactor--表示在前后两次相继的扫描中,搜索窗口的比例系数。默认为1.1即每次搜索窗口依次扩大10%;
* 参数4:minNeighbors--表示构成检测目标的相邻矩形的最小个数(默认为3个)。
* 如果组成检测目标的小矩形的个数和小于 min_neighbors - 1 都会被排除。
* 如果min_neighbors 为 0, 则函数不做任何操作就返回所有的被检候选矩形框,
* 这种设定值一般用在用户自定义对检测结果的组合程序上;
* 参数5:flags--要么使用默认值,要么使用CV_HAAR_DO_CANNY_PRUNING
* 如果设置为CV_HAAR_DO_CANNY_PRUNING,那么函数将会使用Canny边缘检测来排除边缘过多或过少的区域,因此这些区域通常不会是人脸所在区域;
* 参数6、7:minSize和maxSize用来限制得到的目标区域的范围。
* */
faceCascade.detectMultiScale(img, faces, 1.1, 10);
// 在脸四周画出矩形
for (int i = 0; i < faces.size(); i++)
{
rectangle(img, faces[i].tl(), faces[i].br(), Scalar(255, 0, 255), 3);
}
imshow("Image", img);
waitKey(0);
}
运行可以看到成功检测到人脸
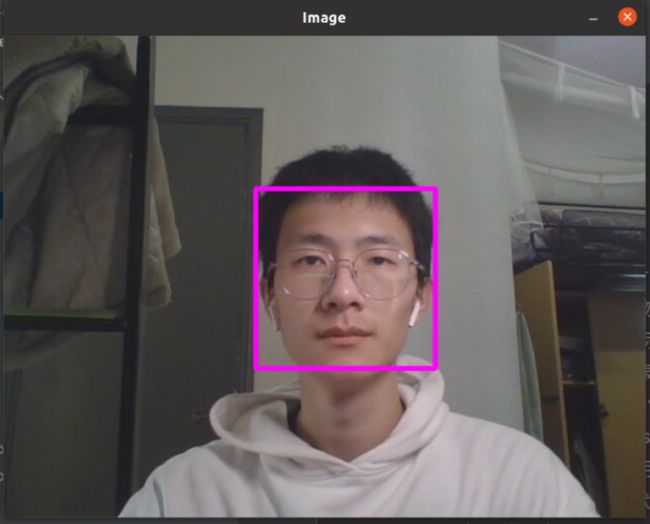
同样地,可以对视频流进行同样的处理
int main()
{
VideoCapture cap(0);
cap.set(CAP_PROP_FRAME_WIDTH, 640);
cap.set(CAP_PROP_FRAME_HEIGHT, 480);
CascadeClassifier faceCascade;
faceCascade.load("/usr/share/opencv4/haarcascades/haarcascade_frontalface_default.xml");
Mat img;
while (true)
{
cap.read(img);
if (faceCascade.empty()) { cout << "XML file not loaded" << endl;}
vector<Rect> faces;
faceCascade.detectMultiScale(img, faces, 1.1, 10);
for (int i = 0; i < faces.size(); i++)
{
rectangle(img, faces[i].tl(), faces[i].br(), Scalar(255, 0, 255), 3);
}
imshow("Image", img);
waitKey(1);
}
}
下面演示三个应用
应用1 空间绘图
#include 10 应用2 文章扫描
#include 应用3 车牌检测
#include