滤波与卷积(一)
滤波与卷积
- 预备知识
- 边界外推和边界处理
-
- 自定义边框
- 自定义外推
- 阈值化操作
-
- cv::threshold()
- Otsu算法
- 自适应阈值
预备知识
本文中有两个重要的概念会经常出现,第一个是滤波器(也称核)以及在OpenCV中具体的运用,第二个是OpenCV在图像的边缘以及图像边界之外的区域如何调用滤波器或其他的方法。
边界外推和边界处理
OpenCV中的滤波操作(如cv::blur(),cv::erode(),cv::dilate()等)得到的输出图像与源图像的形状是一样的。
自定义边框
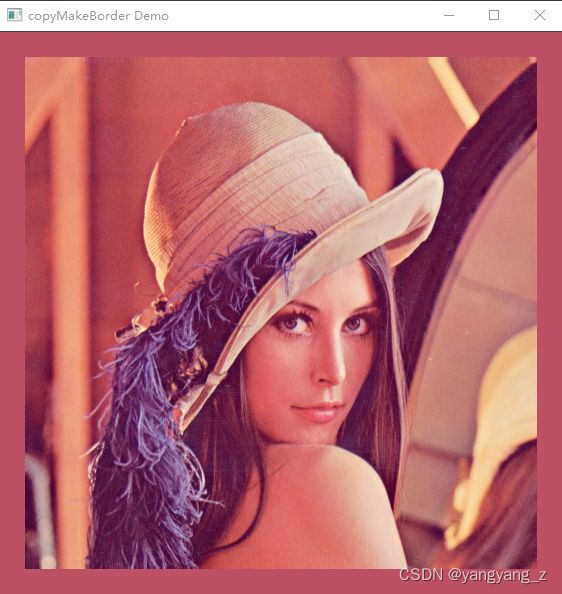
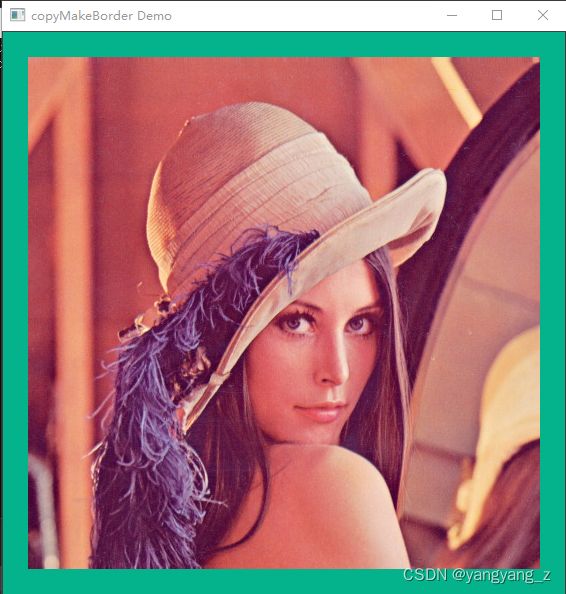
copyMakeBorder()就是为图像创建边框的
CV_EXPORTS_W void copyMakeBorder(
InputArray src, //Source image.
OutputArray dst, //Result image.
int top, //the top pixels
int bottom, //the bottom pixels
int left, //the left pixels
int right, //right side padding
int borderType, //Border type,像素的填充方法
const Scalar& value = Scalar()
);
enum BorderTypes {
BORDER_CONSTANT = 0, //!< `iiiiii|abcdefgh|iiiiiii` with some specified `i`,复制指定的常量扩展边界
BORDER_REPLICATE = 1, //!< `aaaaaa|abcdefgh|hhhhhhh`
BORDER_REFLECT = 2, //!< `fedcba|abcdefgh|hgfedcb`
BORDER_WRAP = 3, //!< `cdefgh|abcdefgh|abcdefg`,复制对边的像素扩展边界
BORDER_REFLECT_101 = 4, //!< `gfedcb|abcdefgh|gfedcba`
BORDER_TRANSPARENT = 5, //!< `uvwxyz|abcdefgh|ijklmno`
BORDER_REFLECT101 = BORDER_REFLECT_101, //!< same as BORDER_REFLECT_101
BORDER_DEFAULT = BORDER_REFLECT_101, //!< same as BORDER_REFLECT_101
BORDER_ISOLATED = 16 //!< do not look outside of ROI
};
copyMakeBorder Demo
代码:
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
using namespace cv;
//![variables]
// Declare the variables
Mat src, dst;
int top, bottom, left, right;
int borderType = BORDER_CONSTANT;
const char* window_name = "copyMakeBorder Demo";
RNG rng(12345);
//![variables]
int main(int argc, char** argv)
{
//![load]
const char* imageName = argc >= 2 ? argv[1] : "lena.jpg";
// Loads an image
src = imread(samples::findFile(imageName), IMREAD_COLOR); // Load an image
// Check if image is loaded fine
if (src.empty()) {
printf(" Error opening image\n");
printf(" Program Arguments: [image_name -- default lena.jpg] \n");
return -1;
}
//![load]
// Brief how-to for this program
printf("\n \t copyMakeBorder Demo: \n");
printf("\t -------------------- \n");
printf(" ** Press 'c' to set the border to a random constant value \n");
printf(" ** Press 'r' to set the border to be replicated \n");
printf(" ** Press 'ESC' to exit the program \n");
//![create_window]
namedWindow(window_name, WINDOW_AUTOSIZE);
//![create_window]
//![init_arguments]
// Initialize arguments for the filter
top = (int)(0.05*src.rows); bottom = top;
left = (int)(0.05*src.cols); right = left;
//![init_arguments]
for (;;)
{
//![update_value]
Scalar value(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
//![update_value]
//![copymakeborder]
copyMakeBorder(src, dst, top, bottom, left, right, borderType, value);
//![copymakeborder]
//![display]
imshow(window_name, dst);
//![display]
//![check_keypress]
char c = (char)waitKey(500);
if (c == 27)
break;
else if (c == 'c')
borderType = BORDER_CONSTANT;
else if (c == 'r')
borderType = BORDER_REPLICATE;
//![check_keypress]
}
return 0;
}
自定义外推
CV_EXPORTS_W int borderInterpolate(
int p, //0-based coordinate of the extrapolated pixel along one of the axes
int len, // Length of the array along the corresponding axis
int borderType //Border type
);
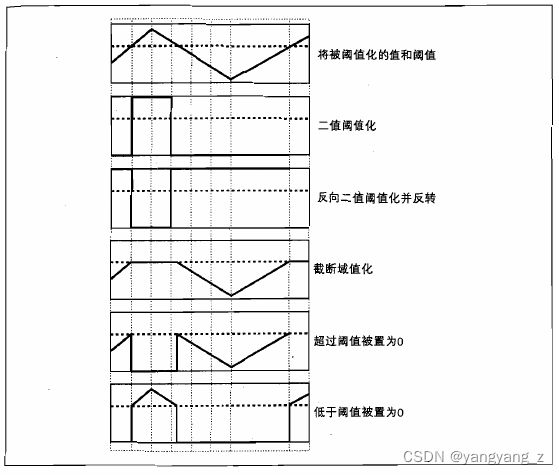
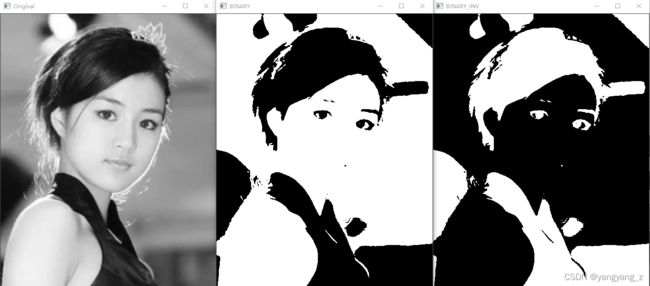
阈值化操作
cv::threshold()
CV_EXPORTS_W double threshold(
InputArray src,
OutputArray dst,
double thresh,
double maxval,
int type // thresholding type (see #ThresholdTypes)
);
enum ThresholdTypes {
THRESH_BINARY = 0,
THRESH_BINARY_INV = 1,
THRESH_TRUNC = 2,
THRESH_TOZERO = 3,
THRESH_TOZERO_INV = 4,
THRESH_MASK = 7,
THRESH_OTSU = 8,
THRESH_TRIANGLE = 16
};
案例结果

案例代码
#includeOtsu算法
函数cv::threshold()也可以自动决定最优的阈值,你只需对参数thresh传递cv::THRESH_OTSU即可。
简言之,Otsu算法就是遍历所有可能的阈值,然后对每个阈值结果的两类像素计算方差。
算法结果:

代码:
#include "opencv2/opencv.hpp"
#include "opencv2/highgui/highgui.hpp"
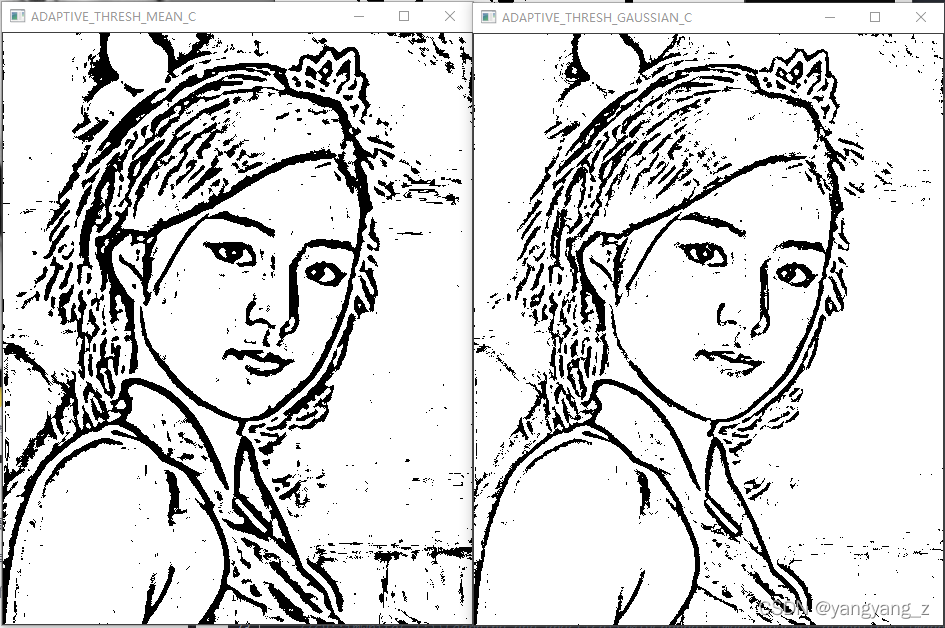
#include 自适应阈值
有一种与之前不同的阈值化方法,这种方法中阈值在整个过程中自动产生变化。在OpenCV中,函数cv::adaptiveThreshold()实现了这种方法:
CV_EXPORTS_W void adaptiveThreshold(
InputArray src,
OutputArray dst,
double maxValue,
int adaptiveMethod, //mean or Gaussian
int thresholdType,
int blockSize,
double C
);
案例结果:

代码:
#include