Qt + OpenCV 部署yolov5
文章目录
-
-
- 一、新建项目 UI设计
- 二、代码部分
-
- mainwindow 类
- yolov5类
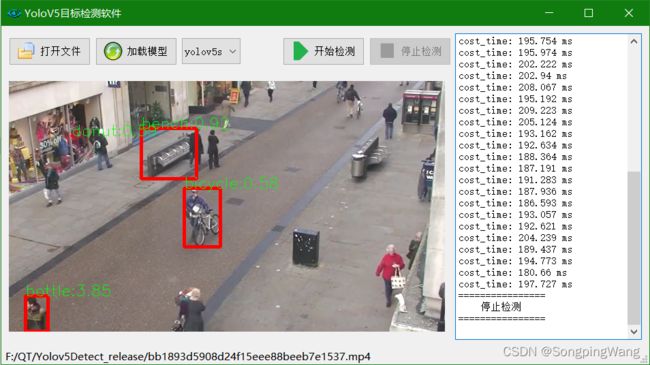
- 三、效果演示
-
分别使用了openvino,opencv_cuda进行加速。
关于演示视频及代码讲解请查看:
https://www.bilibili.com/video/BV13S4y1c7ea/
https://www.bilibili.com/video/BV1Dq4y1x7r6/
https://www.bilibili.com/video/BV1kT4y1S7hz/
一、新建项目 UI设计

二、代码部分
mainwindow 类
mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
, ui(new Ui::MainWindow)
{
ui->setupUi(this);
setWindowTitle(QStringLiteral("YoloV5目标检测软件"));
timer = new QTimer(this);
timer->setInterval(33);
connect(timer,SIGNAL(timeout()),this,SLOT(readFrame()));
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(false);
Init();
}
MainWindow::~MainWindow()
{
capture->release();
delete capture;
delete [] yolo_nets;
delete yolov5;
delete ui;
}
void MainWindow::Init()
{
capture = new cv::VideoCapture();
yolo_nets = new NetConfig[4]{
{0.5, 0.5, 0.5, "yolov5s"},
{0.6, 0.6, 0.6, "yolov5m"},
{0.65, 0.65, 0.65, "yolov5l"},
{0.75, 0.75, 0.75, "yolov5x"}
};
conf = yolo_nets[0];
yolov5 = new YOLOV5();
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral("默认模型类别:yolov5s args: %1 %2 %3")
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}
void MainWindow::readFrame()
{
cv::Mat frame;
capture->read(frame);
if (frame.empty()) return;
auto start = std::chrono::steady_clock::now();
yolov5->detect(frame);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
// double t0 = static_cast(cv::getTickCount());
// yolov5->detect(frame);
// double t1 = static_cast(cv::getTickCount());
// ui->textEditlog->append(QStringLiteral("cost_time: %1 ").arg((t1 - t0) / cv::getTickFrequency()));
cv::cvtColor(frame, frame, cv::COLOR_BGR2RGB);
QImage rawImage = QImage((uchar*)(frame.data),frame.cols,frame.rows,frame.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(rawImage));
}
void MainWindow::on_openfile_clicked()
{
QString filename = QFileDialog::getOpenFileName(this,QStringLiteral("打开文件"),".","*.mp4 *.avi;;*.png *.jpg *.jpeg *.bmp");
if(!QFile::exists(filename)){
return;
}
ui->statusbar->showMessage(filename);
QMimeDatabase db;
QMimeType mime = db.mimeTypeForFile(filename);
if (mime.name().startsWith("image/")) {
cv::Mat src = cv::imread(filename.toLatin1().data());
if(src.empty()){
ui->statusbar->showMessage("图像不存在!");
return;
}
cv::Mat temp;
if(src.channels()==4)
cv::cvtColor(src,temp,cv::COLOR_BGRA2RGB);
else if (src.channels()==3)
cv::cvtColor(src,temp,cv::COLOR_BGR2RGB);
else
cv::cvtColor(src,temp,cv::COLOR_GRAY2RGB);
auto start = std::chrono::steady_clock::now();
yolov5->detect(temp);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
QImage img = QImage((uchar*)(temp.data),temp.cols,temp.rows,temp.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(img));
ui->label->resize(ui->label->pixmap()->size());
filename.clear();
}else if (mime.name().startsWith("video/")) {
capture->open(filename.toLatin1().data());
if (!capture->isOpened()){
ui->textEditlog->append("fail to open MP4!");
return;
}
IsDetect_ok +=1;
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
ui->textEditlog->append(QString::fromUtf8("Open video: %1 succesfully!").arg(filename));
//获取整个帧数QStringLiteral
long totalFrame = capture->get(cv::CAP_PROP_FRAME_COUNT);
ui->textEditlog->append(QStringLiteral("整个视频共 %1 帧").arg(totalFrame));
ui->label->resize(QSize(capture->get(cv::CAP_PROP_FRAME_WIDTH), capture->get(cv::CAP_PROP_FRAME_HEIGHT)));
//设置开始帧()
long frameToStart = 0;
capture->set(cv::CAP_PROP_POS_FRAMES, frameToStart);
ui->textEditlog->append(QStringLiteral("从第 %1 帧开始读").arg(frameToStart));
//获取帧率
double rate = capture->get(cv::CAP_PROP_FPS);
ui->textEditlog->append(QStringLiteral("帧率为: %1 ").arg(rate));
}
}
void MainWindow::on_loadfile_clicked()
{
QString onnxFile = QFileDialog::getOpenFileName(this,QStringLiteral("选择模型"),".","*.onnx");
if(!QFile::exists(onnxFile)){
return;
}
ui->statusbar->showMessage(onnxFile);
if (!yolov5->loadModel(onnxFile.toLatin1().data())){
ui->textEditlog->append(QStringLiteral("加载模型失败!"));
return;
}
IsDetect_ok +=1;
ui->textEditlog->append(QString::fromUtf8("Open onnxFile: %1 succesfully!").arg(onnxFile));
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
}
void MainWindow::on_startdetect_clicked()
{
timer->start();
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(true);
ui->openfile->setEnabled(false);
ui->loadfile->setEnabled(false);
ui->comboBox->setEnabled(false);
ui->textEditlog->append(QStringLiteral("================\n"
" 开始检测\n"
"================\n"));
}
void MainWindow::on_stopdetect_clicked()
{
ui->startdetect->setEnabled(true);
ui->stopdetect->setEnabled(false);
ui->openfile->setEnabled(true);
ui->loadfile->setEnabled(true);
ui->comboBox->setEnabled(true);
timer->stop();
ui->textEditlog->append(QStringLiteral("================\n"
" 停止检测\n"
"================\n"));
}
void MainWindow::on_comboBox_activated(const QString &arg1)
{
if (arg1.contains("s")){
conf = yolo_nets[0];
}else if (arg1.contains("m")) {
conf = yolo_nets[1];
}else if (arg1.contains("l")) {
conf = yolo_nets[2];
}else if (arg1.contains("x")) {
conf = yolo_nets[3];}
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral("使用模型类别:%1 args: %2 %3 %4")
.arg(arg1)
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}
yolov5类
yolov5.h
#ifndef YOLOV5_H
#define YOLOV5_H
#include yolov5.cpp
#include "yolov5.h"
using namespace std;
using namespace cv;
void YOLOV5::Initialization(NetConfig conf)
{
this->confThreshold = conf.confThreshold;
this->nmsThreshold = conf.nmsThreshold;
this->objThreshold = conf.objThreshold;
classIds.reserve(20);
confidences.reserve(20);
boxes.reserve(20);
outs.reserve(3);
}
bool YOLOV5::loadModel(const char *onnxfile)
{
try {
this->net = cv::dnn::readNetFromONNX(onnxfile);
return true;
} catch (exception& e) {
QMessageBox::critical(NULL,"Error",QStringLiteral("模型加载出错,请检查重试!\n %1").arg(e.what()),QMessageBox::Yes,QMessageBox::Yes);
return false;
}
this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_INFERENCE_ENGINE);
this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// try {
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// } catch (exception& e2) {
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_DEFAULT);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// QMessageBox::warning(NULL,"warning",QStringLiteral("正在使用CPU推理!\n %1").arg(e2.what()),QMessageBox::Yes,QMessageBox::Yes);
// return false;
// }
}
void YOLOV5::detect(cv::Mat &frame)
{
cv::dnn::blobFromImage(frame, blob, 1 / 255.0, Size(this->inpWidth, this->inpHeight), Scalar(0, 0, 0), true, false);
this->net.setInput(blob);
this->net.forward(outs, this->net.getUnconnectedOutLayersNames());
/generate proposals
classIds.clear();
confidences.clear();
boxes.clear();
float ratioh = (float)frame.rows / this->inpHeight, ratiow = (float)frame.cols / this->inpWidth;
int n = 0, q = 0, i = 0, j = 0, nout = 8 + 5, c = 0;
for (n = 0; n < 3; n++) ///尺度
{
int num_grid_x = (int)(this->inpWidth / this->stride[n]);
int num_grid_y = (int)(this->inpHeight / this->stride[n]);
int area = num_grid_x * num_grid_y;
this->sigmoid(&outs[n], 3 * nout * area);
for (q = 0; q < 3; q++) ///anchor数
{
const float anchor_w = this->anchors[n][q * 2];
const float anchor_h = this->anchors[n][q * 2 + 1];
float* pdata = (float*)outs[n].data + q * nout * area;
for (i = 0; i < num_grid_y; i++)
{
for (j = 0; j < num_grid_x; j++)
{
float box_score = pdata[4 * area + i * num_grid_x + j];
if (box_score > this->objThreshold)
{
float max_class_socre = 0, class_socre = 0;
int max_class_id = 0;
for (c = 0; c < 80; c++) get max socre
{
class_socre = pdata[(c + 5) * area + i * num_grid_x + j];
if (class_socre > max_class_socre)
{
max_class_socre = class_socre;
max_class_id = c;
}
}
if (max_class_socre > this->confThreshold)
{
float cx = (pdata[i * num_grid_x + j] * 2.f - 0.5f + j) * this->stride[n]; ///cx
float cy = (pdata[area + i * num_grid_x + j] * 2.f - 0.5f + i) * this->stride[n]; ///cy
float w = powf(pdata[2 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_w; ///w
float h = powf(pdata[3 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_h; ///h
int left = (cx - 0.5*w)*ratiow;
int top = (cy - 0.5*h)*ratioh; ///坐标还原到原图上
classIds.push_back(max_class_id);
confidences.push_back(max_class_socre);
boxes.push_back(Rect(left, top, (int)(w*ratiow), (int)(h*ratioh)));
}
}
}
}
}
}
// Perform non maximum suppression to eliminate redundant overlapping boxes with
// lower confidences
vector<int> indices;
cv::dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices);
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
this->drawPred(classIds[idx], confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, frame);
}
}
void YOLOV5::drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat &frame)
{
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 0, 255), 3);
string label = format("%.2f", conf);
label = this->classes[classId] + ":" + label;
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1);
}
void YOLOV5::sigmoid(Mat *out, int length)
{
float* pdata = (float*)(out->data);
int i = 0;
for (i = 0; i < length; i++)
{
pdata[i] = 1.0 / (1 + expf(-pdata[i]));
}
}
三、效果演示