【ROS】话题通信
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。话题通信的应用场景也极其广泛,比如下面一个常见场景:
机器人在执行导航功能,使用的传感器是激光雷达,机器人会采集激光雷达感知到的信息并计算,然后生成运动控制信息驱动机器人底盘运动。
在上述场景中,就不止一次使用到了话题通信。
-
以激光雷达信息的采集处理为例,在 ROS 中有一个节点需要时时的发布当前雷达采集到的数据,导航模块中也有节点会订阅并解析雷达数据。
-
再以运动消息的发布为例,导航模块会根据传感器采集的数据时时的计算出运动控制信息并发布给底盘,底盘也可以有一个节点订阅运动信息并最终转换成控制电机的脉冲信号。
以此类推,像雷达、摄像头、GPS.... 等等一些传感器数据的采集,也都是使用了话题通信,换言之,话题通信适用于不断更新的数据传输相关的应用场景。
概念
以发布订阅的方式实现不同节点之间数据交互的通信模式。
作用
用于不断更新的、少逻辑处理的数据传输场景。
1 理论模型
话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色:
-
ROS Master (管理者)
-
Talker (发布者)
-
Listener (订阅者)
ROS Master 负责保管 Talker 和 Listener 注册的信息,并匹配话题相同的 Talker 与 Listener,帮助 Talker 与 Listener 建立连接,连接建立后,Talker 可以发布消息,且发布的消息会被 Listener 订阅。

整个流程由以下步骤实现:
(0).Talker注册
Talker启动后,会通过RPC在 ROS Master 中注册自身信息,其中包含所发布消息的话题名称。ROS Master 会将节点的注册信息加入到注册表中。
(1).Listener注册
Listener启动后,也会通过RPC在 ROS Master 中注册自身信息,包含需要订阅消息的话题名。ROS Master 会将节点的注册信息加入到注册表中。
(2).ROS Master实现信息匹配
ROS Master 会根据注册表中的信息匹配Talker 和 Listener,并通过 RPC 向 Listener 发送 Talker 的 RPC 地址信息。
(3).Listener向Talker发送请求
Listener 根据接收到的 RPC 地址,通过 RPC 向 Talker 发送连接请求,传输订阅的话题名称、消息类型以及通信协议(TCP/UDP)。
(4).Talker确认请求
Talker 接收到 Listener 的请求后,也是通过 RPC 向 Listener 确认连接信息,并发送自身的 TCP 地址信息。
(5).Listener与Talker件里连接
Listener 根据步骤4 返回的消息使用 TCP 与 Talker 建立网络连接。
(6).Talker向Listener发送消息
连接建立后,Talker 开始向 Listener 发布消息。
注意1:上述实现流程中,前五步使用的 RPC协议,最后两步使用的是 TCP 协议
注意2: Talker 与 Listener 的启动无先后顺序要求
注意3: Talker 与 Listener 都可以有多个
注意4: Talker 与 Listener 连接建立后,不再需要 ROS Master。也即,即便关闭ROS Master,Talker 与 Listern 照常通信。
话题通信需要关注的点:
0:大部分实现已经封装了;
1:话题设置;
2:关注发布者实现;
3:关注订阅者实现;
4:关注消息载体
2 话题通信基本操作A(C++)
需求:
编写发布订阅实现,要求发布方以10HZ(每秒10次)的频率发布文本消息,订阅方订阅消息并将消息内容打印输出。
分析:
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
(1)发布方
(2)接收方
(3)数据(此处为普通文本)
流程:
(1)编写发布方实现;
(2)编写订阅方实现;
(3)编辑配置文件;
(4)编译并执行。
1.发布方
简单版
#include "ros/ros.h"
#include "std_msgs/String.h"
/**
* 发布方实现:
* 1 包含头文件; ROS中的文本类型是-------》std_msgs/String.h
* 2 初始化ros结点;
* 3 创建结点句柄;
* 4 创建发布者对象;
* 5 编写发布逻辑并发布数据
*/
int main(int argc, char *argv[])
{
//设置编码
setlocale(LC_ALL,"");
//2.初始化 ROS 节点:命名(唯一)
// 参数1和参数2 后期为节点传值会使用
// 参数3 是节点名称,是一个标识符,需要保证运行后,在 ROS 网络拓扑中唯一
ros::init(argc,argv,"pub");
// 3 创建结点句柄;
ros::NodeHandle nh; //该类封装了 ROS 中的一些常用功能
// 4 创建发布者对象;
//泛型: 发布的消息类型
//参数1: 要发布到的话题
//参数2: 队列中最大保存的消息数,超出此阀值时,先进的先销毁(时间早的先销毁)
ros::Publisher pub = nh.advertise("fang",10);
// 5 编写发布逻辑并发布数据【循环发布】
//先创建被发布的消息
std_msgs::String msg;
//编写循环,循环中发布数据
while(ros::ok()) //如果结点还存在,则一直循环
{
msg.data = "hello";
pub.publish(msg); //发布数据
}
return 0;
} 再修改配置文件
ctrl+shift+b
roscore
source ./devel/setup.bash
rosrun plumbing_pub_sub demo01_pub_c简单测试
rostopic echo fang

要求以10hz的频率发布数据,并且在文本后添加编号
#include "ros/ros.h"
#include "std_msgs/String.h"
#include
/**
* 发布方实现:
* 1 包含头文件; ROS中的文本类型是-------》std_msgs/String.h
* 2 初始化ros结点;
* 3 创建结点句柄;
* 4 创建发布者对象;
* 5 编写发布逻辑并发布数据
*/
int main(int argc, char *argv[])
{
//设置编码
setlocale(LC_ALL,"");
//2 初始化ros结点
ros::init(argc,argv,"pub");
//3 创建结点句柄
ros::NodeHandle nh;
//4 创建发布者对象
ros::Publisher publisher = nh.advertise("fang",10);
//5 编写发布逻辑并且发布数据
//5.5要求以10hz的频率发布数据,并且在文本后添加编号
//5.1先创建被发布的消息
std_msgs::String msg;
//5.6 设置发布频率
ros::Rate rate(10); //10hz的频率
//5.2编写循环,在循环中发布数据
int count = 0;
while(ros::ok())
{
count++;
// msg.data = "hello"; //5.3数据赋值
//实现字符串拼接数据
std::stringstream ss;
ss<<"hello----->"< 编译
ctrl+shift+b
roscore
source ./devel/setup.bash
rosrun plumbing_pub_sub demo01_pub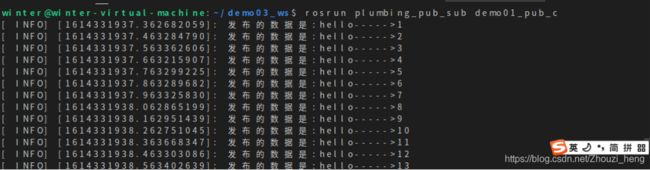
查看
rostopic echo fang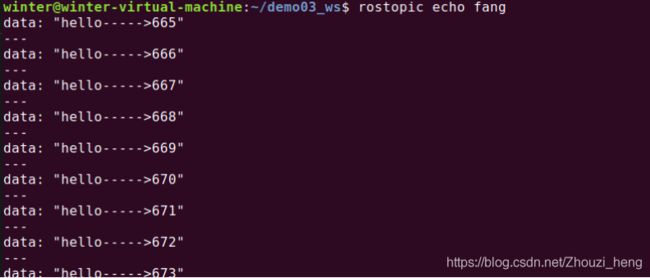
2.订阅方
#include "ros/ros.h"
#include "std_msgs/String.h"
/**
* 订阅方实现:
* 1 包含头文件; ROS中的文本类型是-------》std_msgs/String.h
* 2 初始化ros结点;
* 3 创建结点句柄;
* 4 创建订阅者者对象;
* 5 处理订阅到的数据
* 6 声明spin函数
*/
// 5 处理订阅到的数据
//编写回调函数:参数是订阅到的消息
void doMsg(const std_msgs::String::ConstPtr &msg)
{
//通过msg参数获取并操作订阅的数据
ROS_INFO("订阅到数据是:%s",msg->data.c_str());
}
int main(int argc, char *argv[])
{
// 2 初始化ros结点;
ros::init(argc,argv,"sub");
// 3 创建结点句柄;
ros::NodeHandle nh;
// 4 创建订阅者者对象;
ros::Subscriber subscriber = nh.subscribe("fang",10,doMsg);
ros::spin(); //循环读取接收的数据,并调用回调函数处理
return 0;
}修改配置文件
编译
ctrl+shift+b
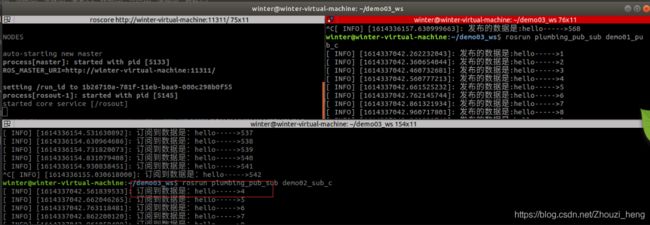
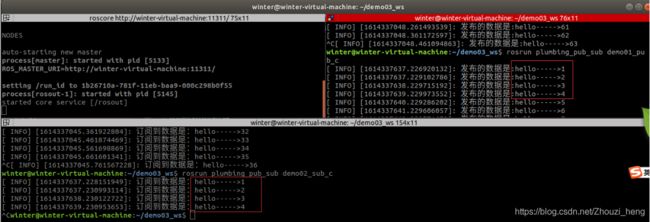
roscore
source ./devel/setup.bash
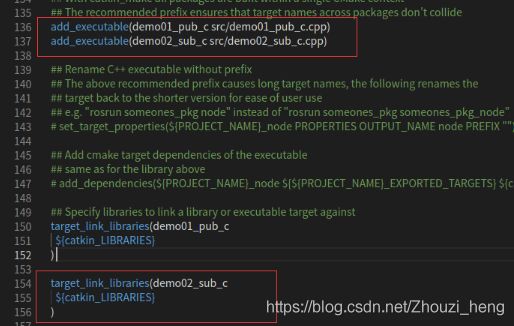
rosrun plumbing_pub_sub demo02_sub_c
3 注意
补充0:
vscode 中的 main 函数 声明 int main(int argc, char const *argv[]){},默认生成 argv 被 const 修饰,需要去除该修饰符
补充1:
ros/ros.h No such file or directory .....
检查 CMakeList.txt find_package 出现重复,删除内容少的即可
参考资料:https://answers.ros.org/question/237494/fatal-error-rosrosh-no-such-file-or-directory/
补充2:
find_package 不添加一些包,也可以运行啊, ros.wiki 答案如下
You may notice that sometimes your project builds fine even if you did not call find_package with all dependencies. This is because catkin combines all your projects into one, so if an earlier project calls find_package, yours is configured with the same values. But forgetting the call means your project can easily break when built in isolation.
补充3:
订阅时,前面数据丢失
先运行订阅者,再运行发布者
原因: 发送前面数据时, publisher 还未在 roscore 注册完毕,所以就订阅不到。
解决: 注册后,加入休眠 ros::Duration(3.0).sleep(); 延迟第一条数据的发送
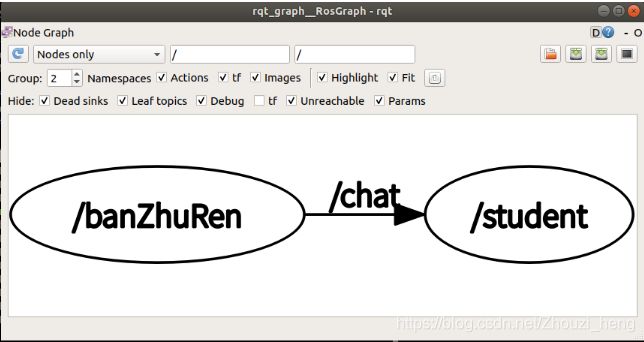
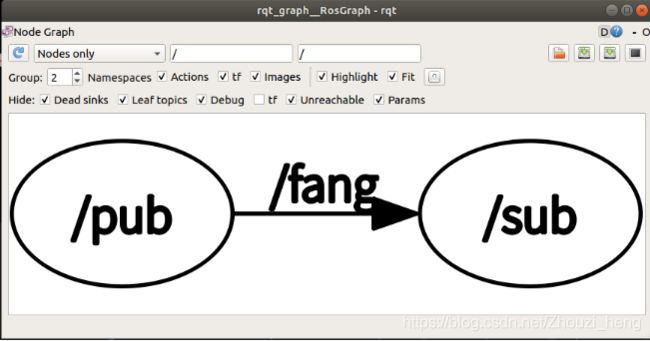
可以使用 rqt_graph 查看节点关系。
3 话题通信自定义msg
在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty.... 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如: 激光雷达的信息... std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型
msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:
-
int8, int16, int32, int64 (或者无符号类型: uint*)
-
float32, float64
-
string
-
time, duration
-
other msg files
-
variable-length array[] and fixed-length array[C]
ROS中还有一种特殊类型:Header,标头包含时间戳和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。
需求:创建自定义消息,该消息包含人的信息:姓名、身高、年龄等。
流程:
-
按照固定格式创建 msg 文件
-
编辑配置文件
-
编译生成可以被 Python 或 C++ 调用的中间文件
1.定义msg文件
功能包下新建 msg 目录,添加文件 Person.msg
string name
uint16 age
float64 height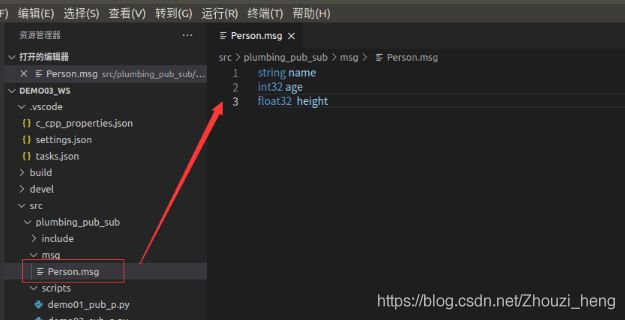
2.编辑配置文件
package.xml中添加编译依赖与执行依赖
message_generation
message_runtime
Copy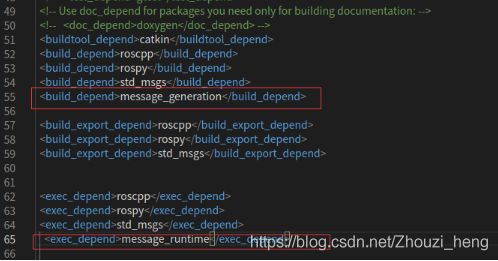
CMakeLists.txt编辑 msg 相关配置
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# 需要加入 message_generation,必须有 std_msgs## 配置 msg 源文件
add_message_files(
FILES
Person.msg
)# 生成消息时依赖于 std_msgs
generate_messages(
DEPENDENCIES
std_msgs
)#执行时依赖
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)3.编译
编译后的中间文件查看:
C++ 需要调用的中间文件(.../工作空间/devel/include/包名/xxx.h)

Python 需要调用的中间文件(.../工作空间/devel/lib/python2.7/dist-packages/包名/msg)
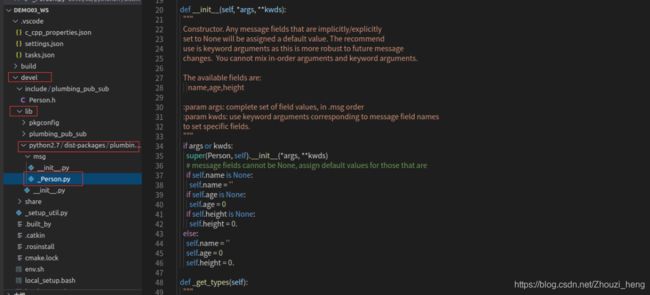
后续调用相关 msg 时,是从这些中间文件调用的
4 话题通信自定义msg调用A(C++)
需求:
编写发布订阅实现,要求发布方以10HZ(每秒10次)的频率发布自定义消息,订阅方订阅自定义消息并将消息内容打印输出。
分析:
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
-
发布方
-
接收方
-
数据(此处为自定义消息)
流程:
-
编写发布方实现;
-
编写订阅方实现;
-
编辑配置文件;
-
编译并执行。
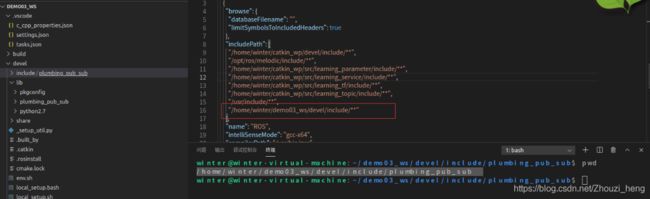
0.vscode 配置
为了方便代码提示以及避免误抛异常,需要先配置 vscode,将前面生成的 head 文件路径配置进 c_cpp_properties.json 的 includepath属性:
{
"configurations": [
{
"browse": {
"databaseFilename": "",
"limitSymbolsToIncludedHeaders": true
},
"includePath": [
"/opt/ros/noetic/include/**",
"/usr/include/**",
"/xxx/yyy工作空间/devel/include/**" //配置 head 文件的路径
],
"name": "ROS",
"intelliSenseMode": "gcc-x64",
"compilerPath": "/usr/bin/gcc",
"cStandard": "c11",
"cppStandard": "c++17"
}
],
"version": 4
}
1.发布方
#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"
/*
发布方:发布人消息
1 包含头文件
2 初始化ros结点
3 创建结点句柄
4 创建发布者对象
5 编写发布逻辑,发布数据
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
//2 初始化ros结点
ros::init(argc,argv,"banZhuRen");
//3 创建结点句柄
ros::NodeHandle nh;
// 4 创建发布者对象
ros::Publisher pubPerson = nh.advertise("chat",100);
//5 编写发布逻辑,发布数据
//创建被发布的数据
plumbing_pub_sub::Person person;
person.name = "张三";
person.age = 18;
person.height = 1.73;
//发布的频率
ros::Rate rate(1);
//循环发布数据
while(ros::ok())
{
//修改被发布的数据
person.age++;
//核心是发布数据
pubPerson.publish(person);
//休眠
rate.sleep();
//回头函数
ros::spinOnce();
}
return 0;
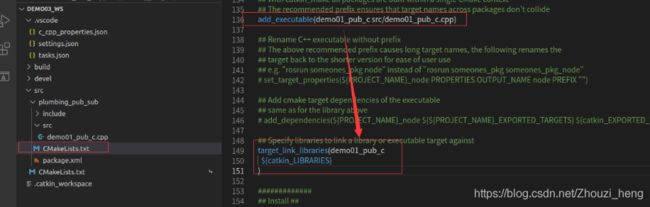
} 配置文件
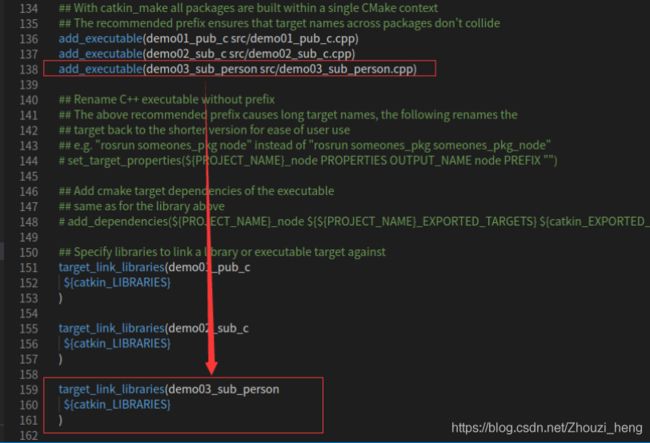
使用自定义msg还需要在配置

add_dependencies(demo03_sub_person ${PROJECT_NAME}_generate_messages_cpp)保证在编译的时候,先编译自定义的msg,在编译调用msg的文件
编译并测试
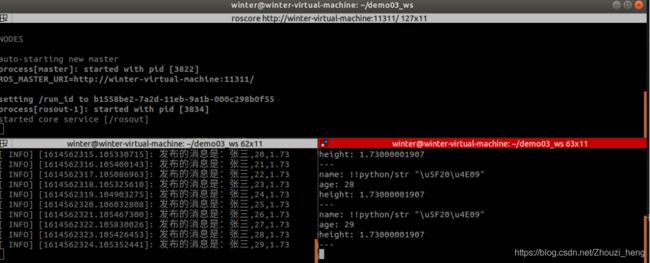
roscore
source ./devel/setup.bash
rosrun plumbing_pub_sub demo03_pub_person
这里不能直接rostopic echo chat
需要先进入工作空间,再source ./devel/setup.bash
然后rostopic echo chat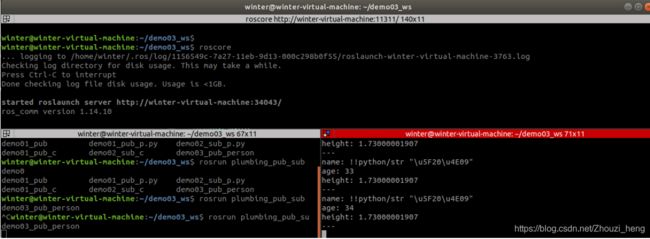
2.订阅方
#include "ros/ros.h"
#include "plumbing_pub_sub/Person.h"
/**
* *
发布方:发布人消息
1 包含头文件
2 初始化ros结点
3 创建结点句柄
4 创建订阅者对象
5 编写回调函数,处理数据
6 spin()函数
*/
//回调函数
void doMsg(const plumbing_pub_sub::Person::ConstPtr& person)
{
ROS_INFO("订阅的人的信息是:%s,%d,%.2f",person->name.c_str(),person->age,person->height);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ROS_INFO("这是订阅方:");
//2 初始化ros结点
ros::init(argc,argv,"student");
// 3 创建结点句柄
ros::NodeHandle nh;
// 4 创建订阅者对象
ros::Subscriber subPerson = nh.subscribe("chat",100,doMsg);
// 5 编写回调函数,处理数据
// 6 spin()函数
ros::spin();
return 0;
}配置文件

编译并测试
roscore
需要先进入工作空间,再source ./devel/setup.bash
然后rosrun plumbing_pub_sub demo03_pub_person
rosrun plumbing_pub_sub demo04_sub_person 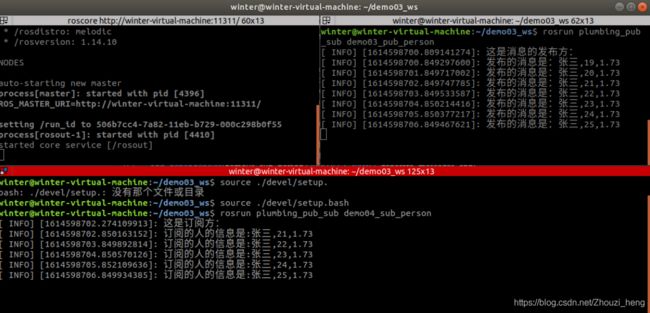
计算图查看