imx219-83 ros使用
1. jetson_nano_csi_cam_ros中译
Jetson Nano DevKit B01 + 双 CSI 摄像头 ROS 驱动程序。
1.1安装方法
系统:L4T R32.4.2 + ROS Melodic
-
下载此此存储库
cd ~/catkin_ws/src git clone https://github.com/rt-net/jetson_nano_csi_cam_ros.git -
gscam和对应的GStreamer-1.0支持包下载
sudo apt-get install gstreamer1.0-tools libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev libgstreamer-plugins-good1.0-devcd ~/catkin_ws/src git clone https://github.com/ros-drivers/gscam.git下载后,编辑
./gscam/Makefile,添加-DGSTREAMER_VERSION_1_x=On:EXTRA_CMAKE_FLAGS = -DUSE_ROSBUILD:BOOL=1 -DGSTREAMER_VERSION_1_x=On -
构建
jetson_nano_csi_cam和gscamcd ~/catkin_ws catkin build source devel/setup.bash
1.2 使用方法
1.2.1 快速开始
要将CAM0连接的相机流数据在ROS主题/csi_cam_0/image_raw下分发,在终端执行以下命令:
roslaunch jetson_nano_csi_cam jetson_csi_cam.launch sensor_id:=0 width:=<image width> height:=<image height> fps:=<desired framerate>
要将连接到CAM0和CAM1的相机流数据在ROS主题/csi_cam_0/image_raw和/csi_cam_1/image_raw下同时分发,在终端执行以下命令:
roslaunch jetson_nano_csi_cam jetson_dual_csi_cam.launch width:=<image width> height:=<image height> fps:=<desired framerate>
1.2.2 视频采集/分发
视频分发
执行以下命令以将相机图像作为 ROS 主题传送。
roslaunch jetson_csi_cam jetson_csi_cam.launch
这次发布只是启动了一个用于分发的节点。还可以为视频分发添加一个选项:
roslaunch jetson_csi_cam jetson_csi_cam.launch width:=1920 height:=1080 fps:=15
对于其它参数,可以在使用roslaunch时以
jetson_csi_cam.launch的其它参数
sensor_id(default:0) – Camera IDwidth(default:640) – 要传送的视频的宽度height(default:480) – 要传送的视频的高度fps(default:30) – 传送的帧率(根据分辨率可能低于这个帧率)cam_name(default:csi_cam_$(arg sensor_id)) – camera info对应的相机名称frame_id(default:/$(arg cam_name)_link) – 用于tf的相机帧名sync_sink(default:true) – appsink的同步设置
(如果你设置了低帧率并且有问题,将此选项设置为false可能会解决问题。)flip_method(default:0) – 传送视频时的图像翻转选项
1.2.3 视频分发测试
检查相机图像
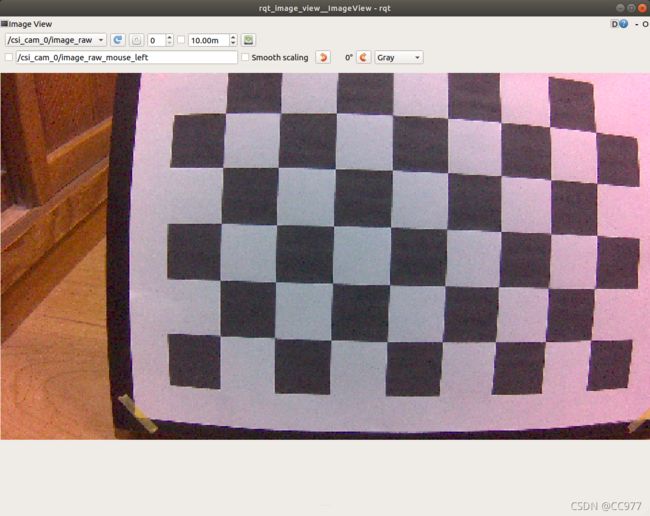
为了方便查看摄像头图像,请在桌面环境(例如 GNOME)中启动终端并执行 rqt_img_view。
rosrun rqt_iamge_view rqt_iamge_view
从启动的图像查看器左上角的下拉菜单中选择相机图像主题。 jetson_csi_cam.launch 的默认设置是/csi_cam_0/image_raw。
帧率测量
您可以使用以下命令检查 ROS 主题的更新频率:
rostopic hz /csi_cam_0/image_raw
相机图像ROS主题更新频率不是指定的图像帧率,但几乎匹配。 如果低于设置的帧率,可能是以下原因。
- Jetson Nano 电源管理处于性能限制模式
- Jetson Nano 与电脑接收视频网络不稳定
- 您指定的值大于或等于所连接摄像头模块的最大帧速率。
1.2.4 相机校准
jetson_nano_csi_cam还将相机信息作为 ROS 主题分发,以便更轻松地校准相机。
要将相机信息与您实际使用的相机相匹配,请根据 ROS Wiki 上的单目相机校准指南/双目相机校准指南进行校准。但无需校准即可分发相机图像。 若需进行校准,请参阅以下信息:
- 您需要按照 ROS Wiki 上的说明打印棋盘格。
- 使用视频分发中解释的 roslaunch 命令分发相机图像。
- 指定图像和相机选项以及棋盘的大小,如下面的命令所示,并进行校准。
#单目 rosrun camera_calibration cameracalibrator.py --size 8x6 --square <square size in meters> image:=/csi_cam_0/image_raw camera:=/csi_cam_0 #双目 rosrun camera_calibration cameracalibrator.py --approximate 0.1 --size 8x6 --square 0.027 --no-service-check right:=/csi_cam_1/image_raw left:=/csi_cam_0/image_raw right_camera:=/csi_cam_1 left_camera:=/csi_cam_0
如果在相机可以看到的范围内将棋盘移动到一定程度,您将可以按下“校准”按钮,从而得到校准文件。

2. IMU的使用
2.1 相机+IMU ROS包
2.2 ICM20948介绍
10 DOF IMU Sensor (D)
IMU —— Mahony滤波算法原理及实现源码
- 使用demo发现fps只有25hz,查看源码发现是磁力计读取占用了较多时间,而源码计算四元数时又使用了磁力计数据以确定方位。第三讲 AHRS姿态解算
- 关于标定文件的使用可用函数:
ICM20948_Calibration()
ICM20948通过软I2C IIC的读取三轴原始数据方法(含源代码)
ICM-20948 9-Axis Sensor Part I - 驱动
原来的demo磁力计读取速度慢,要换个驱动改ros版本,以下备用
Qwiic_9DoF_IMU_ICM20948_Py
SparkFun Qwiic 9DoF IMU Breakout
Playground for experimenting with ICM20948
ICM20948 9-DOF Accelerometer, Magnetometer and Gyroscope
C Driver for the ICM-20948 9-Axis Telemetry sensor
2.3 IMU 标定
VIO 中 IMU 的标定流程 (3/3) - imu_tk 使用备忘
总结:单独标定IMU的工具包(kalibr_allan,imu_tk,imu_utils)
IMU-TK: Inertial Measurement Unit ToolKit
#launch
>
>
>
>
-d $(find little_stereo_camera)/rviz/stereo_pcl.rviz" />
-0.5 0.5 -0.5 map stereo_image 100" output = "screen"/>
>
>
<!-- > -->
>
>
>
#! /usr/bin/env python
import numpy as np
import cv2
import os
import rospy
import shlex
import subprocess
import yaml
from std_msgs.msg import String
from std_msgs.msg import Header
from sensor_msgs.msg import Image
from sensor_msgs.msg import CameraInfo
from cv_bridge import CvBridge, CvBridgeError
import thread
# from pub_info import *
class LittleStereoCam():
def __init__(self):
rospy.init_node("little_stereo_camera", anonymous = True)
self.bridge = CvBridge()
self.left_image_pub = rospy.Publisher("stereo/left/image_raw", Image, queue_size=1)
self.left_image_info_pub = rospy.Publisher("stereo/left/camera_info", CameraInfo, queue_size=1)
self.right_image_pub = rospy.Publisher("stereo/right/image_raw", Image, queue_size=1)
self.right_image_info_pub = rospy.Publisher("stereo/right/camera_info", CameraInfo, queue_size=1)
self.camera_info = CameraInfo()
self.msg_header = Header()
self.ros_image = Image()
self.ros_image.height = 240
self.ros_image.width = 320
cam_id= rospy.get_param("cam_id", 0)
dir_path = os.path.dirname(os.path.realpath(__file__))
self.left_yaml_file = dir_path+"/../calibration/left.yaml"
self.right_yaml_file = dir_path+"/../calibration/right.yaml"
self.cam=cv2.VideoCapture(cam_id)
cam_mode_dict={
'LEFT_EYE_MODE':1,
'RIGHT_EYE_MODE':2,
'RED_BLUE_MODE':3,
'BINOCULAR_MODE':4,
}
cam_mode=cam_mode_dict['BINOCULAR_MODE']
command_list=[
"uvcdynctrl -d /dev/video{cam_id} -S 6:8 '(LE)0x50ff'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:15 '(LE)0x00f6'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:8 '(LE)0x2500'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:8 '(LE)0x5ffe'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:15 '(LE)0x0003'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:15 '(LE)0x0002'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:15 '(LE)0x0012'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:15 '(LE)0x0004'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:8 '(LE)0x76c3'",
"uvcdynctrl -d /dev/video{cam_id} -S 6:10 '(LE)0x0{cam_mode}00'",
]
for command in command_list:
subprocess.Popen(shlex.split(command.format(cam_id=cam_id,cam_mode=cam_mode)))
def pub_image(self, publisher, image, header):
try:
self.ros_image = self.bridge.cv2_to_imgmsg(image, "bgr8")
self.ros_image.header = header
publisher.publish(self.ros_image)
except CvBridgeError as e:
print(e)
def yaml_to_camera_info(self,yaml_file):
with open(yaml_file, "r") as f :
calib_data = yaml.load(f)
camera_info_msg = CameraInfo()
camera_info_msg.width = calib_data["image_width"]
camera_info_msg.height = calib_data["image_height"]
camera_info_msg.K = calib_data["camera_matrix"]["data"]
camera_info_msg.D = calib_data["distortion_coefficients"]["data"]
camera_info_msg.R = calib_data["rectification_matrix"]["data"]
camera_info_msg.P = calib_data["projection_matrix"]["data"]
camera_info_msg.distortion_model = calib_data["distortion_model"]
return camera_info_msg
def run(self):
# left_cam_info = self.yaml_to_camera_info(self.left_yaml_file)
# right_cam_info = self.yaml_to_camera_info(self.right_yaml_file)
left_cam_info = CameraInfo()
left_cam_info.width = 640
left_cam_info.height = 480
left_cam_info.K = [883.998642, 0.000000, 349.540253, 0.000000, 887.969815, 247.902874, 0.000000, 0.000000, 1.000000]
left_cam_info.D = [0.125962, -0.905045, 0.006512, 0.007531, 0.000000]
left_cam_info.R = [0.985389, 0.006639, 0.170189, -0.004920, 0.999933, -0.010521, -0.170248, 0.009530, 0.985355]
left_cam_info.P = [1022.167889, 0.000000, 150.220785, 0.000000, 0.000000, 1022.167889, 249.024044, 0.000000, 0.000000, 0.000000, 1.000000, 0.000000]
left_cam_info.distortion_model = 'plumb_bob'
right_cam_info = CameraInfo()
right_cam_info.width = 640
right_cam_info.height = 480
right_cam_info.K = [874.019843, 0.000000, 331.121922, 0.000000, 875.918758, 244.867443, 0.000000, 0.000000, 1.000000]
right_cam_info.D = [0.041385, -0.059698, 0.005392, 0.009075, 0.000000]
right_cam_info.R = [0.976610, 0.003803, 0.214985, -0.005979, 0.999937, 0.009472, -0.214936, -0.010535, 0.976571]
right_cam_info.P = [1022.167889, 0.000000, 150.220785, -41.006903, 0.000000, 1022.167889, 249.024044, 0.000000, 0.000000, 0.000000, 1.000000, 0.000000]
right_cam_info.distortion_model = 'plumb_bob'
rate = rospy.Rate(20)
while not rospy.is_shutdown():
ret,frame=self.cam.read()
if not ret:
print('[ERROR]: frame error')
break
expand_frame=cv2.resize(frame,None,fx=2,fy=1)
left_image = expand_frame[0:480,0:640]
right_image = expand_frame[0:480,640:1280]
self.msg_header.frame_id = 'stereo_image'
self.msg_header.stamp = rospy.Time.now()
left_cam_info.header = self.msg_header
right_cam_info.header = self.msg_header
self.left_image_info_pub.publish(left_cam_info)
self.right_image_info_pub.publish(right_cam_info)
# self.pub_image(self.left_image_pub, left_image, self.msg_header )
# self.pub_image(self.right_image_pub, right_image, self.msg_header )
try:
thread.start_new_thread( self.pub_image, (self.left_image_pub, left_image, self.msg_header, ))
thread.start_new_thread( self.pub_image, (self.right_image_pub, right_image, self.msg_header, ))
except:
print("[ERROR]: unable to start thread")
rate.sleep()
if __name__ == '__main__':
lsc = LittleStereoCam()
try:
lsc.run()
except rospy.ROSInterruptException:
pass
#!/usr/bin/env python
import time
import serial
import binascii
import rospy
from geometry_msgs.msg import Quaternion, Vector3
from sensor_msgs.msg import Imu
import codecs
s=serial.Serial("/dev/ttyUSB0",115200)
rospy.init_node("imu")
imuPub = rospy.Publisher("imu", Imu, queue_size=1)
rate=rospy.Rate(100)
Hex_str=codecs.decode('770500560560','hex')
s.write(Hex_str)
data= str(binascii.b2a_hex(s.read(6)))
#print(data)
print('AUTO PUT DATA TYPE SETTING SUCCESS')
Hex_str=codecs.decode('7705000C0617','hex')
s.write(Hex_str)
data=str(binascii.b2a_hex(s.read(6)))
#print(data)
print('SET 100Hz OUTPUT FREQUNSE')
try:
while not rospy.is_shutdown():
data= str(binascii.b2a_hex(s.read(48)))
g_value=data[26:44]
a_value=data[44:62]
q_value=data[62:95]
#x_acc
x_acc=9.87933*int(g_value[1:6])/10000.0
if int(g_value[0]):
x_acc=-1*x_acc
#y_acc
y_acc=9.87933*int(g_value[7:12])/10000.0
if int(g_value[6]) :
y_acc=-1*y_acc
#z_acc
z_acc=9.87933*int(g_value[13:])/10000.0
if int(g_value[12]):
z_acc=-1*z_acc
#an_x
an_x=int(a_value[1:6])/100.0/57.29578
if int(a_value[0]):
an_x=-1*an_x
#an_y
an_y=int(a_value[7:12])/100.0/57.29578
if int(a_value[6]):
an_y=-1*an_y
#an_z
an_z=int(a_value[13:])/100.0/57.29578
if int(a_value[12]):
an_z=-1*an_z
#print('acc:x,y,z:',x_acc,y_acc,z_acc)
#print('an_acc:x,y,z:',an_x,an_y,an_z)
q_0=int(q_value[1:8])/1000000.0
if int(q_value[0]):
q_0=-1*q_0
q_1=int(q_value[9:15])/1000000.0
if int(q_value[8]):
q_1=-1*q_1
q_2=int(q_value[16:23])/1000000.0
if int(q_value[15]):
q_2=-1*q_2
q_3=int(q_value[24:31])/1000000.0
if int(q_value[23]):
q_3=-1*q_3
imuMsg = Imu()
stamp = rospy.get_rostime()
imuMsg.header.stamp, imuMsg.header.frame_id = stamp, "imu_link"
imuMsg.orientation.x=0.707107*q_0
imuMsg.orientation.y=0.707107*q_3
imuMsg.orientation.z=-0.707107*q_2
imuMsg.orientation.w=-0.707107*q_1
#imuMsg.orientation_covariance = cov_orientation
imuMsg.angular_velocity.x, imuMsg.angular_velocity.y, imuMsg.angular_velocity.z = an_y,-1.0*an_x,-1.0*an_z
#imuMsg.angular_velocity_covariance = cov_angular_velocity
imuMsg.linear_acceleration.x, imuMsg.linear_acceleration.y, imuMsg.linear_acceleration.z = -1.0*x_acc,-1.0*y_acc,-1.0*z_acc
#imuMsg.linear_acceleration_covariance = cov_linear_acceleration
imuPub.publish(imuMsg)
rate.sleep()
except:
Hex_str=codecs.decode('7705000C0011','hex')
s.write(Hex_str)
data= str(binascii.b2a_hex(s.read(6)))
print('ANSER TYPE SETTING SUCCESS')
pass