多传感器融合定位(1-3D激光里程计)4-实现调用pcl-icp-1
多传感器融合定位(1-3D激光里程计)4-实现调用pcl-icp-1
本次使用的是任乾老师 tag4.0的代码,修改原来NDT的接口代码
参考博客:
从零开始做自动驾驶定位(四): 前端里程计之初试
无人驾驶算法学习(五):激光里程计之帧间匹配算法
NDT vs ICP
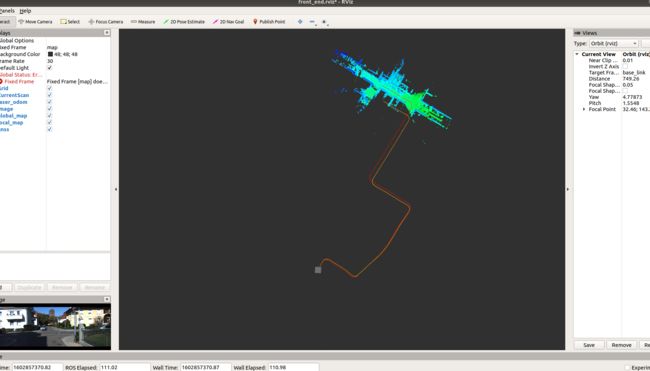
红色为经ICP处理后的里程计运动轨迹,黄色为GNSS的轨迹(可视为groundTruth),地图上白色是当前帧,彩色是地图
NDT带参数处理 里程计
设置NDT匹配参数
ndt_ptr_->setResolution(1.0);
ndt_ptr_->setStepSize(0.1);
ndt_ptr_->setTransformationEpsilon(0.01);
ndt_ptr_->setMaximumIterations(30);

ICP 里程计
参数设置:
//设置ICP参数配置
//icp_ptr_->setMaxCorrespondenceDistance(1e-10) ; //设置最大对应点的欧式距离,只有对应点之间的距离小于该设置值的对应点才作为ICP计算的点对。默认值为:1.7976931348623157e+308,基本上对所有点都计算了匹配点。
// icp_ptr_->setTransformationEpsilon(1e-7);
// icp_ptr_->setMaxCorrespondenceDistance(0.1);
icp_ptr_->setEuclideanFitnessEpsilon(1e-6); //设置前后两次迭代的点对的欧式距离均值的最大容差,迭代终止条件之三,默认值为:-std::numeric_limits::max ()
icp_ptr_->setMaximumIterations(50); //最大迭代次数
icp_ptr_->setTransformationEpsilon(1e-6); //设置前后两次迭代的转换矩阵的最大容差(epsilion),一旦两次迭代小于这个最大容差,则认为已经收敛到最优解,迭代停止。迭代停止条件之二,默认值为:0
icp_ptr_->setMaxCorrespondenceDistance(1); //最大欧式距离差值

调用PCL-ICP的主要修改部分
源代码 为任乾老师 从零开始自动驾驶tag4.0的代码 Little-Potato-1990 /localization_in_auto_driving
使用vscode 进行ros下的编程
ros项目调试:vscode下配置开发ROS项目
主要稍微修改的工程部分为 front_end.hpp front_end.cpp
//front_end.cpp 添加 PCL-ICP的实例化
icp_ptr_(new pcl::IterativeClosestPoint<CloudData::POINT, CloudData::POINT>()), //初始化ICP
//front_end.hpp 添加 PCL-ICP的头文件
#include //front_end.hpp 添加 PCL-ICP的声明
pcl::IterativeClosestPoint<CloudData::POINT, CloudData::POINT>::Ptr icp_ptr_;
全部修改代码
front_end.cpp
/*
* @Description: 前端里程计算法
* @Author: Ren Qian
* @Date: 2020-02-04 18:53:06
*/
#include "lidar_localization/front_end/front_end.hpp"
#include ()), //初始化 NDT
local_map_ptr_(new CloudData::CLOUD()),
global_map_ptr_(new CloudData::CLOUD()),
result_cloud_ptr_(new CloudData::CLOUD()) {
// 给个默认参数,以免类的使用者在匹配之前忘了设置参数
cloud_filter_.setLeafSize(1.3, 1.3, 1.3);
local_map_filter_.setLeafSize(0.6, 0.6, 0.6);
display_filter_.setLeafSize(0.5, 0.5, 0.5);
// 设置NDT匹配参数
// ndt_ptr_->setResolution(1.0);
// ndt_ptr_->setStepSize(0.1);
// ndt_ptr_->setTransformationEpsilon(0.01);
// ndt_ptr_->setMaximumIterations(30);
//设置ICP参数配置
//icp_ptr_->setMaxCorrespondenceDistance(1e-10) ; //设置最大对应点的欧式距离,只有对应点之间的距离小于该设置值的对应点才作为ICP计算的点对。默认值为:1.7976931348623157e+308,基本上对所有点都计算了匹配点。
// icp_ptr_->setTransformationEpsilon(1e-7);
// icp_ptr_->setMaxCorrespondenceDistance(0.1);
icp_ptr_->setEuclideanFitnessEpsilon(1e-6); //设置前后两次迭代的点对的欧式距离均值的最大容差,迭代终止条件之三,默认值为:-std::numeric_limits::max ()
icp_ptr_->setMaximumIterations(50); //最大迭代次数
icp_ptr_->setTransformationEpsilon(1e-6); //设置前后两次迭代的转换矩阵的最大容差(epsilion),一旦两次迭代小于这个最大容差,则认为已经收敛到最优解,迭代停止。迭代停止条件之二,默认值为:0
icp_ptr_->setMaxCorrespondenceDistance(1); //最大欧式距离差值
}
Eigen::Matrix4f FrontEnd::Update(const CloudData& cloud_data) {
current_frame_.cloud_data.time = cloud_data.time;
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*cloud_data.cloud_ptr, *current_frame_.cloud_data.cloud_ptr, indices);
CloudData::CLOUD_PTR filtered_cloud_ptr(new CloudData::CLOUD());
cloud_filter_.setInputCloud(current_frame_.cloud_data.cloud_ptr);
cloud_filter_.filter(*filtered_cloud_ptr);
static Eigen::Matrix4f step_pose = Eigen::Matrix4f::Identity();
static Eigen::Matrix4f last_pose = init_pose_;
static Eigen::Matrix4f predict_pose = init_pose_;
static Eigen::Matrix4f last_key_frame_pose = init_pose_;
// 局部地图容器中没有关键帧,代表是第一帧数据
// 此时把当前帧数据作为第一个关键帧,并更新局部地图容器和全局地图容器
if (local_map_frames_.size() == 0) {
current_frame_.pose = init_pose_;
UpdateNewFrame(current_frame_);
return current_frame_.pose;
}
// 不是第一帧,就正常匹配
icp_ptr_->setInputSource(filtered_cloud_ptr); // 输入当前帧
icp_ptr_->align(*result_cloud_ptr_, predict_pose);
current_frame_.pose = icp_ptr_->getFinalTransformation();
// 更新相邻两帧的相对运动
step_pose = last_pose.inverse() * current_frame_.pose;
predict_pose = current_frame_.pose * step_pose;
last_pose = current_frame_.pose;
// 匹配之后根据距离判断是否需要生成新的关键帧,如果需要,则做相应更新
if (fabs(last_key_frame_pose(0,3) - current_frame_.pose(0,3)) +
fabs(last_key_frame_pose(1,3) - current_frame_.pose(1,3)) +
fabs(last_key_frame_pose(2,3) - current_frame_.pose(2,3)) > 2.0) {
UpdateNewFrame(current_frame_);
last_key_frame_pose = current_frame_.pose;
}
return current_frame_.pose;
}
bool FrontEnd::SetInitPose(const Eigen::Matrix4f& init_pose) {
init_pose_ = init_pose;
return true;
}
bool FrontEnd::SetPredictPose(const Eigen::Matrix4f& predict_pose) {
predict_pose_ = predict_pose;
return true;
}
void FrontEnd::UpdateNewFrame(const Frame& new_key_frame) {
Frame key_frame = new_key_frame;
// 这一步的目的是为了把关键帧的点云保存下来
// 由于用的是共享指针,所以直接复制只是复制了一个指针而已
// 此时无论你放多少个关键帧在容器里,这些关键帧点云指针都是指向的同一个点云
key_frame.cloud_data.cloud_ptr.reset(new CloudData::CLOUD(*new_key_frame.cloud_data.cloud_ptr));
CloudData::CLOUD_PTR transformed_cloud_ptr(new CloudData::CLOUD());
// 更新局部地图,实现滑窗,把时间靠前的关键帧踢出去
local_map_frames_.push_back(key_frame);
while (local_map_frames_.size() > 20) {
local_map_frames_.pop_front();
}
local_map_ptr_.reset(new CloudData::CLOUD());
for (size_t i = 0; i < local_map_frames_.size(); ++i) {
pcl::transformPointCloud(*local_map_frames_.at(i).cloud_data.cloud_ptr,
*transformed_cloud_ptr,
local_map_frames_.at(i).pose);
*local_map_ptr_ += *transformed_cloud_ptr;
}
has_new_local_map_ = true;
// 更新ndt匹配的目标点云
if (local_map_frames_.size() < 10) {
icp_ptr_->setInputTarget(local_map_ptr_); //更新小地图,滑窗
} else {
CloudData::CLOUD_PTR filtered_local_map_ptr(new CloudData::CLOUD());
local_map_filter_.setInputCloud(local_map_ptr_);
local_map_filter_.filter(*filtered_local_map_ptr);
icp_ptr_->setInputTarget(filtered_local_map_ptr);
}
// 更新全局地图
global_map_frames_.push_back(key_frame);
if (global_map_frames_.size() % 100 != 0) {
return;
} else {
global_map_ptr_.reset(new CloudData::CLOUD());
for (size_t i = 0; i < global_map_frames_.size(); ++i) {
pcl::transformPointCloud(*global_map_frames_.at(i).cloud_data.cloud_ptr,
*transformed_cloud_ptr,
global_map_frames_.at(i).pose);
*global_map_ptr_ += *transformed_cloud_ptr;
}
has_new_global_map_ = true;
}
}
bool FrontEnd::GetNewLocalMap(CloudData::CLOUD_PTR& local_map_ptr) {
if (has_new_local_map_) {
display_filter_.setInputCloud(local_map_ptr_);
display_filter_.filter(*local_map_ptr);
return true;
}
return false;
}
bool FrontEnd::GetNewGlobalMap(CloudData::CLOUD_PTR& global_map_ptr) {
if (has_new_global_map_) {
display_filter_.setInputCloud(global_map_ptr_);
display_filter_.filter(*global_map_ptr);
return true;
}
return false;
}
bool FrontEnd::GetCurrentScan(CloudData::CLOUD_PTR& current_scan_ptr) {
display_filter_.setInputCloud(result_cloud_ptr_);
display_filter_.filter(*current_scan_ptr);
return true;
}
}
front_end.hpp
/*
* @Description: 前端里程计算法
* @Author: Ren Qian
* @Date: 2020-02-04 18:52:45
*/
#ifndef LIDAR_LOCALIZATION_FRONT_END_FRONT_END_HPP_
#define LIDAR_LOCALIZATION_FRONT_END_FRONT_END_HPP_
#include