多传感器融合定位(4-基于滤波的2融合方法)2-使用仿真数据进行imu-gnss eskf和时变系统下的可观测性分析
多传感器融合定位(4-基于滤波的2融合方法)2-使用仿真数据进行imu-gnss eskf和时变系统下的可观测性分析
本次作业摘自 张松鹏大哥的优秀作业
代码下载 https://github.com/rainbowrooster/Multi—sensor-fusion-and-positioning/tree/main/chapter4/Q2
下载说明:chapter4/Q2 中 , gnss-ins-sim 优秀代码为鹏哥自定义仿真场景,和使用gnss-ins-sim生成仿真IMU数据的py文件;ins里 ins.cpp 为 鹏哥的eskf 模型和 可观性分析源码,eskf_ins.cpp 为参鹏哥代码自打代码,包含自己理解的注解;matplolib 里 plot_data.m 为修改后适应matlab2016a的可视化代码,plot_data2.m为鹏哥的原可视化代码。
主要公式:
kalman 五大重要公式

姿态误差、速度误差、位置误差
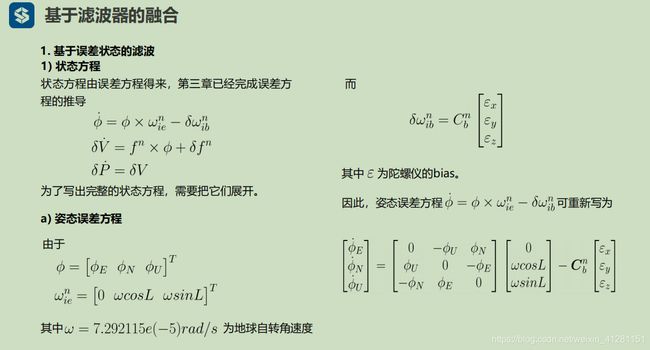
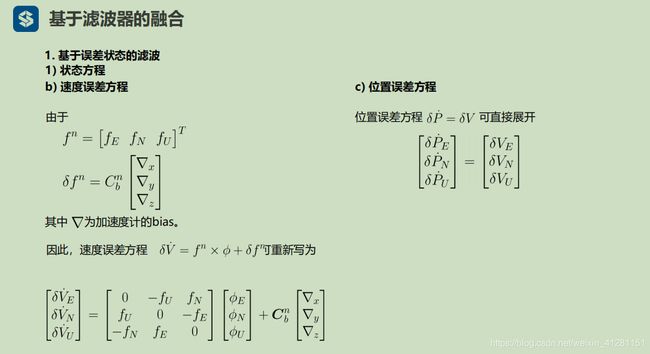
eskf 状态方程


eskf 观测方程

离散时间滤波器


部分代码片 eskf_ins.cpp:
同步GPS 和 IMU 数据
在同步数据中,分为 未初始化传感器数据同步(IMU数据第一帧) 和 初始化传感器后的数据同步(多帧IMU数据) ;时间同步以gnss数据为准。
以gnss数据为同步基准
/*以gnss时间为准*/
if (gnss_buff.empty())
{
return false;
}
current_gnss = gnss_buff.front(); //读取当前gnss队列第一个数据
double sync_time = current_gnss.time;
GroundTruth 时间 数据 同步
/*sync groundtruth 数据*/
//gt时间同步
while (gt_buff.size() > 1)
{
if(gt_buff[1].time < sync_time)
{
gt_buff.pop_front(); //将不对齐的时间删除
}else
{
break;
}
}
//gt数据同步
if(gt_buff.size() > 1)
{
PoseData front_data = gt_buff.at(0); //上一帧数据
PoseData back_data = gt_buff.at(1);
double front_scale = (back_data.time - sync_time) / (back_data.time - front_data.time);
double back_scale = (sync_time -front_data.time) / (back_data.time - front_data.time);
current_gt.time = sync_time ;
//插值
current_gt.state.p = front_data.state.p * front_scale + back_data.state.p * back_scale;
current_gt.state.v = front_data.state.v * front_scale + back_data.state.v * back_scale;
current_gt.state.q= front_data.state.q.slerp(front_scale,back_data.state.q);
current_gt.state.bg = front_data.state.bg * front_scale + back_data.state.bg * back_scale;
current_gt.state.ba = front_data.state.ba * front_scale + back_data.state.ba * back_scale;
}else{
return false;
}
IMU 时间 数据 同步
// imu 数据同步
if (imu_buff.size() > 1)
{
/*IMU 未初始化的数据同步*/
if (!inited)
{
current_imu.clear();
IMUData front_data = imu_buff.at(0);
IMUData back_data = imu_buff.at(1);
IMUData synced_data;
double front_scale = (back_data.time - sync_time) / (back_data.time - front_data.time);
double back_scale = (sync_time - front_data.time) / (back_data.time - front_data.time);
synced_data.time = sync_time;
synced_data.acc = front_data.acc * front_scale + back_data.acc * back_scale;
synced_data.gyro = front_data.gyro * front_scale + back_data.gyro * back_scale;
current_imu.push_back(synced_data);
imu_buff.pop_front();
gnss_buff.pop_front();
// std::cout << std::setprecision(12) << "sync_time " << sync_time
// << " current_imu.time " << current_imu.front().time
// << " " << current_imu.back().time << std::endl;
return true;
}
if (imu_buff.back().time < sync_time)
{
return false;
}
while (current_imu.size() > 1)
{
current_imu.pop_front();
}
while (imu_buff.front().time < sync_time)
{
IMUData temp = imu_buff.front();
imu_buff.pop_front();
current_imu.push_back(temp); // 将新的IMU数据放在deque队列末尾
}
IMUData front_data = current_imu.back();
IMUData back_data = imu_buff.at(0); //取 刚好比 sync_time 大的imu 数据
IMUData synced_data;
//插值
double front_scale = (back_data.time - sync_time) / (back_data.time - front_data.time);
double back_scale = (sync_time - front_data.time) / (back_data.time - front_data.time);
synced_data.time = sync_time;
synced_data.acc = front_data.acc * front_scale + back_data.acc * back_scale;
synced_data.gyro = front_data.gyro * front_scale + back_data.gyro * back_scale;
current_imu.push_back(synced_data);
gnss_buff.pop_front();
return true;
}else{
return false;
}
传感器初始化
bool InitSensor() //初始化 传感器
{
while (!gnss_buff.empty())
{
if (imu_buff.front().time > gnss_buff.front().time)
{
gnss_buff.pop_front(); //删除时间不匹配的 gnss 数据,保证 imu的数据在前
}else
{
return true;
}
}
return false;
}
位姿初始化
bool InitPose()
{
static bool pose_inited = false;
if (pose_inited)
{
return true;
}
if (!SyncData(false))
{
return false;
}
current_pose.time = current_gt.time;
current_pose.state.p = current_gt.state.p;
current_pose.state.q = current_gt.state.q;
current_pose.state.v = current_gt.state.v;
current_pose.state.bg = current_gt.state.bg;
current_pose.state.ba = current_gt.state.ba;
current_error_state.x.setZero();
current_error_state.p.setZero();
current_error_state.p.block<3, 3>(0, 0) = Eigen::Matrix3d::Identity() * init_noise[0];
current_error_state.p.block<3, 3>(3, 3) = Eigen::Matrix3d::Identity() * init_noise[1];
current_error_state.p.block<3, 3>(6, 6) = Eigen::Matrix3d::Identity() * init_noise[2];
current_error_state.p.block<3, 3>(9, 9) = Eigen::Matrix3d::Identity() * init_noise[3];
current_error_state.p.block<3, 3>(12, 12) = Eigen::Matrix3d::Identity() * init_noise[4];
pose_inited = true;
return true;
}
基于误差的卡尔曼滤波
/*滤波*/
bool Filter()
{
Predict();
if (correct)
{
Correct();
}
return true;
}
eskf 预测
bool Predict() // 预测
{
current_pose.time = current_gt.time;
Eigen::Vector3d pp = current_pose.state.p;
Eigen::Vector3d vv = current_pose.state.v;
Eigen::Quaterniond qq = current_pose.state.q;
double w = 7.27220521664304e-05; // 地球自转速度
Eigen::Vector3d gn(0, 0, -9.79484197226504); // 重力加速度
Eigen::Vector3d w_ie_n(0, w * std::cos(current_gnss.lla[0] * M_PI / 180),
w * std::sin(current_gnss.lla[0] * M_PI / 180));
double rm = 6353346.18315; // 短半轴
double rn = 6384140.52699; // 长半轴
Eigen::Vector3d w_en_n(-vv[1] / (rm + current_gnss.lla[2]),
vv[0] / (rn + current_gnss.lla[2]),
vv[0] / (rn + current_gnss.lla[2]) * std::tan(current_gnss.lla[0] * M_PI / 180));
Eigen::Vector3d w_in_n = w_ie_n + w_en_n;
for (int i = 1; i < current_imu.size(); ++i)
{
double dt = current_imu[i].time - current_imu[i - 1].time;
Eigen::Vector3d wtemp = w_in_n * dt;
double angle = wtemp.norm();
Eigen::Quaterniond qn(1, 0, 0, 0);
if (angle != 0)
{
wtemp = wtemp / angle;
wtemp = std::sin(angle / 2) * wtemp;
qn = Eigen::Quaterniond(std::cos(angle / 2), wtemp[0], wtemp[1], wtemp[2]);
}
qn.normalize(); // 地球自转的角增量
Eigen::Vector3d wb = 0.5* current_imu[i - 1].gyro + 0.5*current_imu[i].gyro;
wb = wb + current_pose.state.bg;
wb = wb * dt;
angle = wb.norm();
Eigen::Quaterniond qb(1,0,0,0);
if (angle != 0)
{
wb = wb / angle;
wb = std::sin(angle / 2) * wb;
qb = Eigen::Quaterniond(std::cos(angle / 2),wb[0],wb[1],wb[2] );
}
qb.normalize(); //载体角增量
Eigen::Quaterniond qq2 = qn.inverse() * qq * qb; // 下一时刻的旋转矩阵
Eigen::Vector3d f1 = current_imu[i-1].acc;
f1 = f1 + current_pose.state.ba;
Eigen::Vector3d f2 = current_imu[i].acc;
f2 = f2 + current_pose.state.ba;
Eigen::Vector3d vv2 = vv + dt * (0.5* (qq * f1 + qq * f2) + gn); //下一时刻的速度
Eigen::Vector3d pp2 = pp + 0.5*dt* (vv + vv2);
pp = pp2;
vv = vv2;
qq = qq2;
}
current_pose.state.p = pp; //更新当前位置
current_pose.state.v = vv;
current_pose.state.q = qq;
Ft = Eigen::Matrix<double,15,15>::Zero(); // 状态转移矩阵
Ft.block<3,3>(0,3) = Eigen::Matrix<double, 3 ,3>::Identity();
Eigen::Matrix<double,3,3>temp = Eigen::Matrix<double,3,3>::Zero();
Eigen::Vector3d ff = current_imu.back().acc;
// F23
ff = qq*ff;
temp(0,1) = -ff[2];
temp(0,2) = ff[1];
temp(1,0) = ff[2];
temp(1, 2) = -ff[0];
temp(2, 0) = -ff[1];
temp(2, 1) = ff[0];
Ft.block<3,3>(3,6) = temp;
// Cb_n
Ft.block<3,3>(3,12) = qq.toRotationMatrix();
temp.setZero();
// F33
temp(0, 1) = w_ie_n(2);
temp(0, 2) = -w_ie_n(1);
temp(1, 0) = -w_ie_n(2);
temp(2, 0) = w_ie_n(1);
Ft.block<3,3>(6,6) = temp;
//- Cb_n
Ft.block<3,3>(6,9) = -Ft.block<3,3>(3,12);
Eigen::Matrix<double,15,6> Bt = Eigen::Matrix<double,15,6>::Zero();
Bt.block<3,3>(3,3) = Ft.block<3,3>(3,12);
Bt.block<3,3>(6,0) = Ft.block<3, 3>(6, 9);
T = current_imu.back().time - current_imu.front().time;
// Qso 离散滤波器
Ft = Eigen::Matrix<double,15 ,15>::Identity() + Ft * T ; // Fk-1 ,上一时刻的状态转移矩阵
Bt = Bt * T ; // Bk-1 ,上一时刻的观测矩阵
Eigen::Matrix<double,6,1> W = Eigen::Matrix<double,6,1>::Zero(); //器件噪声 ,一般指 IMU的零偏不稳定系
// eskf 先验
current_error_state.x = Ft * current_error_state.x + Bt * W;
Eigen::Matrix<double, 6, 6> Q = Eigen::Matrix<double, 6, 6>::Identity(); // 惯性噪声
Q.block<3,3>(0,0) = Eigen::Matrix<double,3,3>:: Identity()* gyro_noise * gyro_noise;
Q.block<3,3>(3,3) = Eigen::Matrix<double,3,3>:: Identity()* acc_noise * acc_noise;
current_error_state.p = Ft * current_error_state.p * Ft.transpose() + Bt * Q * Bt.transpose();
return true ;
}
eskf 修正
// 修正融合
bool Correct()
{
double geo_x, geo_y, geo_z;
geo_converter.Forward(current_gnss.lla(0), current_gnss.lla(1),
current_gnss.lla(2), geo_x, geo_y, geo_z); // 将经纬度处理为 x y z
Eigen::Vector3d gnss_xyz(geo_x, geo_y, geo_z);
Y.block<3,1>(0,0) = current_pose.state.p - gnss_xyz; // 观测误差
Gt = Eigen::Matrix<double,3,15>::Zero();
Gt.block<3,3>(0,0) = Eigen::Matrix<double,3,3>::Identity();
Eigen::Matrix<double,3,3> Ct = Eigen::Matrix<double,3,3>::Identity();
Eigen::Matrix<double, 3, 3> R = Eigen::Matrix<double, 3, 3>::Identity(); // 观测噪声, gps噪声
R.block<3, 3>(0, 0) = Eigen::Matrix3d::Identity() * dp_noise * dp_noise;
Eigen::Matrix<double, 15, 3> K = current_error_state.p * Gt.transpose() * (Gt * current_error_state.p * Gt.transpose() + Ct * R * Ct.transpose()).inverse(); // kf 增益
// 计算后验
current_error_state.p = (Eigen::Matrix<double, 15, 15>::Identity() - K * Gt) * current_error_state.p; // 后验方差
current_error_state.x = current_error_state.x + K * (Y - Gt * current_error_state.x); // 后验状态
// 位姿、姿态 update
current_pose.state.p = current_pose.state.p - current_error_state.x.block<3,1>(0,0);
current_pose.state.v = current_pose.state.v - current_error_state.x.block<3,1>(3,0);
Eigen::Vector3d dphi_dir = current_error_state.x.block<3, 1>(6, 0);
double dphi_norm = dphi_dir.norm();
if (dphi_norm != 0)
{
dphi_dir = dphi_dir / dphi_norm;
dphi_dir = dphi_dir * std::sin(dphi_norm / 2);
}
Eigen::Quaterniond temp2(std::cos(dphi_norm / 2), dphi_dir[0], dphi_dir[1], dphi_dir[2]);
current_pose.state.q = temp2 * current_pose.state.q; // 更新旋转矢量
current_pose.state.q.normalize();
current_pose.state.bg = current_pose.state.bg - current_error_state.x.block<3, 1>(9, 0);
current_pose.state.ba = current_pose.state.ba - current_error_state.x.block<3, 1>(12, 0);
current_error_state.x.setZero(); // 清空误差
return true;
}
保存观测度分析所需的F G 和 Y
/*保存观测度分析所需的F G 和 Y*/
bool SaveFG()
{
if (FGs.size() > FGsize)
{
return true;
}
if (FGs.empty())
{
FG fg;
fg.time = current_gt.time;
// fg.F = Ft;
fg.F = Ft - Eigen::Matrix<double, 15, 15>::Identity();
// fg.F = (Ft - Eigen::Matrix::Identity()) / T;
fg.G = Gt;
fg.Y.push_back(Y);
FGs.push_back(fg);
}
else
{
if (FGs.back().Y.size() == 15)
{
if (current_gt.time - FGs.back().time < time_interval || FGs.size() >= FGsize)
{
return true;
}
FG fg;
fg.time = current_gt.time;
// fg.F = Ft;
fg.F = Ft - Eigen::Matrix<double, 15, 15>::Identity();
// fg.F = (Ft - Eigen::Matrix::Identity()) / T;
fg.G = Gt;
fg.Y.push_back(Y);
FGs.push_back(fg);
}
else
{
FGs.back().Y.push_back(Y);
}
}
return true;
}
保存位姿信息
void SavePose(std::ofstream &save_points, PoseData &pose)
{
Eigen::Quaterniond qtemp = pose.state.q;
// if (qtemp.w() < 0)
// {
// qtemp.coeffs() = -1.0 * qtemp.coeffs();
// }
double angle = std::acos(qtemp.w()) * 2;
double sin_angle = std::sin(angle / 2);
Eigen::Vector3d dir(0, 0, 0);
if (sin_angle != 0)
{
dir(0) = qtemp.x() / sin_angle;
dir(1) = qtemp.y() / sin_angle;
dir(2) = qtemp.z() / sin_angle;
dir = dir * angle;
}
save_points.precision(12);
save_points << pose.time
<< "," << pose.state.p(0)
<< "," << pose.state.p(1)
<< "," << pose.state.p(2)
<< "," << pose.state.v(0)
<< "," << pose.state.v(1)
<< "," << pose.state.v(2)
// << "," << pose.state.q.x()
// << "," << pose.state.q.y()
// << "," << pose.state.q.z()
// << "," << pose.state.q.w()
<< "," << dir(0)
<< "," << dir(1)
<< "," << dir(2)
<< "," << pose.state.bg(0)
<< "," << pose.state.bg(1)
<< "," << pose.state.bg(2)
<< "," << pose.state.ba(0)
<< "," << pose.state.ba(1)
<< "," << pose.state.ba(2)
<< std::endl;
}
可观测性分析
Eigen::MatrixXd Qso(3*15*FGs.size(),15);
Eigen::MatrixXd Ys(3*15*FGs.size(),1);
for (int i = 0; i < FGs.size(); ++i)
{
Eigen::Matrix<double,15,15> Fn = Eigen::Matrix<double,15,15>::Identity();
for (int j = 0; j < 15; j++)
{
if (j > 0)
{
Fn = Fn * FGs[i].F;
}
Ys.block<3, 1>(i*3*15+3*j, 0) = FGs[i].Y[j];
Qso.block<3, 15>(i*3*15+3*j, 0) = FGs[i].G * Fn ; // 构建可观测性矩阵
}
}
Eigen::JacobiSVD<Eigen::MatrixXd> svd(Qso, Eigen::ComputeFullU | Eigen::ComputeFullV);
std::cout << Qso.rows() << ", " << Qso.cols() << std::endl;
// std::cout << svd.singularValues() << std::endl;
for (int i = 0; i < 15; ++i)
{
double temp = (svd.matrixU().row(i) * Ys)[0] / svd.singularValues()[i];
Eigen::MatrixXd Xi = temp * svd.matrixV().col(i);
// std::cout << Xi.transpose() << std::endl;
Eigen::MatrixXd::Index maxRow, maxCol;
Xi = Xi.cwiseAbs(); // Xi的绝对值
double maxvalue = Xi.maxCoeff(&maxRow, &maxCol);
std::cout << svd.singularValues()(i) / svd.singularValues()(0) << "," << maxRow << std::endl;
sv_ofs << svd.singularValues()(i) / svd.singularValues()(0) << "," << maxRow << std::endl;
}
仿真与分析
采用 imu_data7.py 生成数据
# imu_err
imu_err = {'gyro_b': np.array([1e-2, 2e-2, 3e-2]) / D2R * 3600 * 0,
'gyro_arw': np.array([1e-5, 1e-5, 1e-5]) / D2R * 60 * 0,
'gyro_b_stability': np.array([1e-5, 1e-5, 1e-5]) / D2R * 3600 * 1e-0,
'gyro_b_corr': np.array([100.0, 100.0, 100.0]),
'accel_b': np.array([2.0e-3, 1.0e-3, 5.0e-3]) * 0,
'accel_vrw': np.array([1e-4, 1e-4, 1e-4]) * 60.0 * 0,
'accel_b_stability': np.array([1e-4, 1e-4, 1e-4]) * 1.0 * 1e0,
'accel_b_corr': np.array([200.0, 200.0, 200.0]),
# 'mag_std': np.array([0.2, 0.2, 0.2]) * 1.0
}
# generate GPS and magnetometer data
gps_err = {
'stdp': np.array([1, 1, 1]) * 1e-6,
'stdv': np.array([0, 0, 0]),
}
imu = imu_model.IMU(accuracy=imu_err, axis=6, gps=True, gps_opt=gps_err)
其中陀螺仪零偏稳定性为 1e-5rad/s(约 2deg/h),加速度计零偏稳定性为 1e-4m/s^2,GPS 位置误
差为 1e-6m/s,其它误差量均设置为 0。运行 ins 生成数据后,采用 plot_data.m 来绘制各状态量和真实
值的数据,采用 plot_data2.m 来绘制各状态量与真实值相减之后的数据,以分析收敛情况,具体代码见
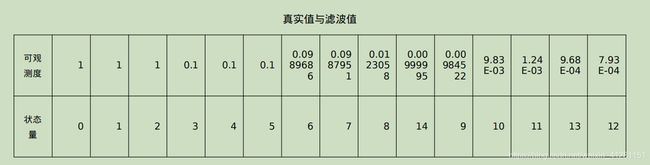
附件。在可观测度分析中,各状态量对应的编号从 0 到 14。
运行 ./ins 或 ./eskf_ins 对 四种场景进行可观测性分析 eg. 结果总结部分摘自张松鹏优秀作业讲解
a) 静止状态
如下图终端打印显示为,生成的 在时变系统下 Qso矩阵的 450行,15列; 第二行-第16行为对Qso矩阵进行SVD分解后得出的降序排列奇异值和对应的状态量,可观测度一般低于 1e-4 或 1e-5 认为不可观。

运行 plot_data.m 生成可视化分析
各状态量的收敛情况见下图,从图中可看出,航向角(8),而这这个状态量对应的可观测度系数均非常小,为e-05量级,另外,z 轴角速度零偏的收敛速度很慢,直到 10分钟后才逐渐收敛,它对应的可观测度也很低,在 1.2e-7 左右,由于其仍然能够收敛,因此认为它是可观的。

通调整 FGsize,加大时变系统下的方程组数,可使变量可观

b) 匀速状态 -摘自 松鹏大哥作业
仿真命令参见附件文件 imu_def8.csv,b 系沿前向(y 轴正向)做匀速运动。各状态量的收敛情况见下图,可观测度系数见下表。从图中可看出,收敛情况与静止状态完全相同,航向角,x 轴加速度零偏和 y 轴加速度零偏均未收敛,这 3 个状态量对应的可观测度系数均很小,在 1e-33 到 1e-28 量级,因此 3 个状态量是不可观的。z 轴角速度零偏收敛速度很慢,对应的可观测度也很低,在 6e-8 左右,但仍然能够收敛,因此是可观的。


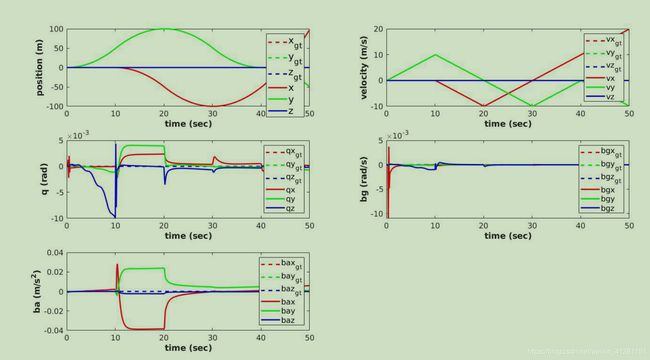
c) 加减速状态 -摘自 松鹏大哥作业
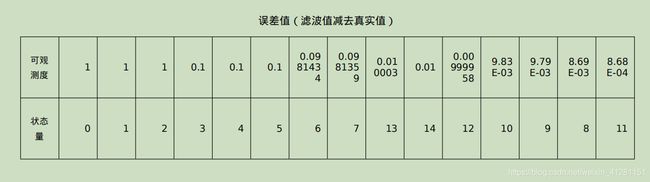
仿真命令参见附件文件 imu_def9.csv,b 系沿 x 轴和 y 轴两个方向分别做加减速运动,具体运动参考下图中的位置和速度变化曲线。可观测度系数见下表。各状态量对应的可观测度系数均在 7.9e-4 以上,而图中各状态量的误差值均在 0 值附近波动,可认为达到收敛状态。但由于 IMU 数据存在误差,各状态量均存在一定程度的误差。在加减速变换时,角度和零偏的误差值均有一定波动。可观测度系数中最小的 3 个是 z 轴角速度零偏,x 轴加速度零偏,y 轴加速度零偏,均在 1e-3 量级,3 个状态量观测度较低,而收敛
速度也较慢,特别是 2 个加速度水平零偏,在 20s 之后误差值才逐渐减小,因此对应的可观测度也最低。航向角的误差值在几次加减速后逐渐下降了一个数量级,对应的可观测度较前面 2 种情况也有大幅提高,约 0.012。
d) 转向状态 -摘自 松鹏大哥作业
仿真命令参见附件文件 imu_def10.csv,b 系做绕 8 字运动,具体运动情况见下图的位置和姿态变化。各状态量可观测度系数见下表。各状态量对应的可观测度系数均在 8.7e-4 以上,而图中各状态量的误差值均在 0 值附近波动,可认为达到收敛状态。但由于 IMU 数据存在误差,各状态量均存在一定程度的误差。在做转向变换时,角度和零偏的误差值均有一定波动。可观测度系数小于或者等于 0.01 量级的有 7 个状态量,包括航向角和 6 个零偏参数,这 7 个参数均在开始有所波动,但经过几十秒后收敛。


添加个人注解的 ins.cpp
/*eskf_ins.cpp*/
#include ::Identity()) / T;
fg.G = Gt;
fg.Y.push_back(Y);
FGs.push_back(fg);
}
else
{
if (FGs.back().Y.size() == 15)
{
if (current_gt.time - FGs.back().time < time_interval || FGs.size() >= FGsize)
{
return true;
}
FG fg;
fg.time = current_gt.time;
// fg.F = Ft;
fg.F = Ft - Eigen::Matrix<double, 15, 15>::Identity();
// fg.F = (Ft - Eigen::Matrix::Identity()) / T;
fg.G = Gt;
fg.Y.push_back(Y);
FGs.push_back(fg);
}
else
{
FGs.back().Y.push_back(Y);
}
}
return true;
}
/*滤波*/
bool Filter()
{
Predict();
if (correct)
{
Correct();
}
return true;
}
void SavePose(std::ofstream &save_points, PoseData &pose)
{
Eigen::Quaterniond qtemp = pose.state.q;
// if (qtemp.w() < 0)
// {
// qtemp.coeffs() = -1.0 * qtemp.coeffs();
// }
double angle = std::acos(qtemp.w()) * 2;
double sin_angle = std::sin(angle / 2);
Eigen::Vector3d dir(0, 0, 0);
if (sin_angle != 0)
{
dir(0) = qtemp.x() / sin_angle;
dir(1) = qtemp.y() / sin_angle;
dir(2) = qtemp.z() / sin_angle;
dir = dir * angle;
}
save_points.precision(12);
save_points << pose.time
<< "," << pose.state.p(0)
<< "," << pose.state.p(1)
<< "," << pose.state.p(2)
<< "," << pose.state.v(0)
<< "," << pose.state.v(1)
<< "," << pose.state.v(2)
// << "," << pose.state.q.x()
// << "," << pose.state.q.y()
// << "," << pose.state.q.z()
// << "," << pose.state.q.w()
<< "," << dir(0)
<< "," << dir(1)
<< "," << dir(2)
<< "," << pose.state.bg(0)
<< "," << pose.state.bg(1)
<< "," << pose.state.bg(2)
<< "," << pose.state.ba(0)
<< "," << pose.state.ba(1)
<< "," << pose.state.ba(2)
<< std::endl;
}
bool SaveData() // 保存数据
{
SavePose(gt_ofs, current_gt);
SavePose(pose_ofs, current_pose);
}
int main(int argc, char const *argv[])
{
std::vector<std::string> path;
path.push_back("../../gnss-ins-sim/imu_data/data7/time.csv");
path.push_back("../../gnss-ins-sim/imu_data/data7/accel-0.csv");
path.push_back("../../gnss-ins-sim/imu_data/data7/gyro-0.csv");
path.push_back("../../gnss-ins-sim/imu_data/data7/gps_time.csv");
path.push_back("../../gnss-ins-sim/imu_data/data7/gps-0.csv");
path.push_back("../../gnss-ins-sim/imu_data/data7/ref_pos.csv");
path.push_back("../../gnss-ins-sim/imu_data/data7/ref_vel.csv");
path.push_back("../../gnss-ins-sim/imu_data/data7/ref_att_quat.csv");
ReadData(path);
gt_ofs.open("../../gnss-ins-sim/imu_data/data7/gt.txt", std::fstream::out);
pose_ofs.open("../../gnss-ins-sim/imu_data/data7/pose.txt", std::fstream::out);
sv_ofs.open("../../gnss-ins-sim/imu_data/data7/sv.txt", std::fstream::out);
FGs.clear();
YAML::Node yaml_node = YAML::LoadFile("../param.yaml");
gyro_noise = yaml_node["gyro_noise"].as<double>();
acc_noise = yaml_node["acc_noise"].as<double>();
dp_noise = yaml_node["dp_noise"].as<double>();
init_noise = yaml_node["init_noise"].as<std::vector<double>>();
FGsize = yaml_node["FGsize"].as<int>();
end_time = yaml_node["end_time"].as<double>();
time_interval = yaml_node["time_interval"].as<double>();
correct = yaml_node["correct"].as<bool>();
if (!InitSensor())
{
std::cerr << "InitSensor Error!!!" << std::endl;
return -1;
}
if (!InitPose())
{
std::cerr << "InitPose Error!!!" << std::endl;
return -1;
}
SaveData();
while (SyncData(true))
{
Filter();
SaveData();
SaveFG();
if (current_gt.time > end_time)
{
break;
}
}
Eigen::MatrixXd Qso(3*15*FGs.size(),15);
Eigen::MatrixXd Ys(3*15*FGs.size(),1);
for (int i = 0; i < FGs.size(); ++i)
{
Eigen::Matrix<double,15,15> Fn = Eigen::Matrix<double,15,15>::Identity();
for (int j = 0; j < 15; j++)
{
if (j > 0)
{
Fn = Fn * FGs[i].F;
}
Ys.block<3, 1>(i*3*15+3*j, 0) = FGs[i].Y[j];
Qso.block<3, 15>(i*3*15+3*j, 0) = FGs[i].G * Fn ; // 构建可观测性矩阵
}
}
Eigen::JacobiSVD<Eigen::MatrixXd> svd(Qso, Eigen::ComputeFullU | Eigen::ComputeFullV);
std::cout << Qso.rows() << ", " << Qso.cols() << std::endl;
// std::cout << svd.singularValues() << std::endl;
for (int i = 0; i < 15; ++i)
{
double temp = (svd.matrixU().row(i) * Ys)[0] / svd.singularValues()[i];
Eigen::MatrixXd Xi = temp * svd.matrixV().col(i);
// std::cout << Xi.transpose() << std::endl;
Eigen::MatrixXd::Index maxRow, maxCol;
Xi = Xi.cwiseAbs(); // Xi的绝对值
double maxvalue = Xi.maxCoeff(&maxRow, &maxCol);
std::cout << svd.singularValues()(i) / svd.singularValues()(0) << "," << maxRow << std::endl;
sv_ofs << svd.singularValues()(i) / svd.singularValues()(0) << "," << maxRow << std::endl;
}
return 0;
}