多传感器融合定位 第七章 基于滤波的融合方法
多传感器融合定位 第七章 基于滤波的融合方法
参考博客:深蓝学院-多传感器融合定位-第7章作业
本次作业:主要参考张松鹏大佬的代码,因为大佬的解析太好了,为了保留记录,以下大部分文字,均摘自大佬的原话~
代码下载:https://github.com/kahowang/sensor-fusion-for-localization-and-mapping/tree/main/%E7%AC%AC%E4%BA%94%E7%AB%A0%20%E6%83%AF%E6%80%A7%E5%AF%BC%E8%88%AA%E5%8E%9F%E7%90%86%E5%8F%8A%E8%AF%AF%E5%B7%AE%E5%88%86%E6%9E%90/imu_tk
 1.环境配置
1.环境配置
1.1 protoc 版本问题
前几章使用的protoc 的版本为3.14, 第七章使用的proto版本为3.15
解决方法:需要安装新版本的proto 3.15x,按照第四章的方式生成对应的文件。

按照GeYao README中的方法,重新生成基于自己基环境protobuf的proto:
打开lidar_localization/config/scan_context文件夹,输入如下命令,生成pb文件
protoc --cpp_out=./ key_frames.proto
protoc --cpp_out=./ ring_keys.proto
protoc --cpp_out=./ scan_contexts.proto
mv key_frames.pb.cc key_frames.pb.cpp
mv ring_keys.pb.cc ring_keys.pb.cpp
mv scan_contexts.pb.cc scan_contexts.pb.cpp
分别修改生成的三个.pb.cpp文件。如下,以ring_keys.pb.cpp为例。
// Generated by the protocol buffer compiler. DO NOT EDIT!
// source: ring_keys.proto
#define INTERNAL_SUPPRESS_PROTOBUF_FIELD_DEPRECATION
#include "ring_keys.pb.h" 替换为 #include "lidar_localization/models/scan_context_manager/ring_keys.pb.h"
#include 之后,用以上步骤生成的的.pb.h文件替换lidar_localization/include/lidar_localization/models/scan_context_manager
中的同名文件。
将.pb.cpp文件替换(注意:需要剪切,确保config文件中新生成的文件都转移到对应目录下,不能重复出现)lidar_localization/src/models/scan_context_manager中的同名文件。
1.2 缺少 fmt 库

git clone https://github.com/fmtlib/fmt
cd fmt/
mkdir build
cd build
cmake ..
make
sudo make install
编译过程中出现:error_state_kalman_filter.cpp:(.text.unlikely+0x84):对‘fmt::v8::detail::assert_fail(char const, int, char const)’未定义的引用**
参考网址: undefined reference to `vtable for fmt::v7::format_error‘
cd catkin_ws/src/lidar_localization/cmake/sophus.cmake
list append 添加 fmt
# sophus.cmake
find_package (Sophus REQUIRED)
include_directories(${Sophus_INCLUDE_DIRS})
list(APPEND ALL_TARGET_LIBRARIES ${Sophus_LIBRARIES} fmt)
1.3 glog缺少gflag的依赖
logging.cc:(.text+0x6961):对‘google::FlagRegisterer::FlagRegisterer(char const*, char const*, char const*, bool*, bool*)’未定义的引用

#解决办法: 打开glog.cmake , 末尾改为
list(APPEND ALL_TARGET_LIBRARIES ${GLOG_LIBRARIES} libgflags.a libglog.a)
2.error state kalmam filter
FILE: lidar_localization/src/model/kalman_filter/error_state_kalman_filter.cpp
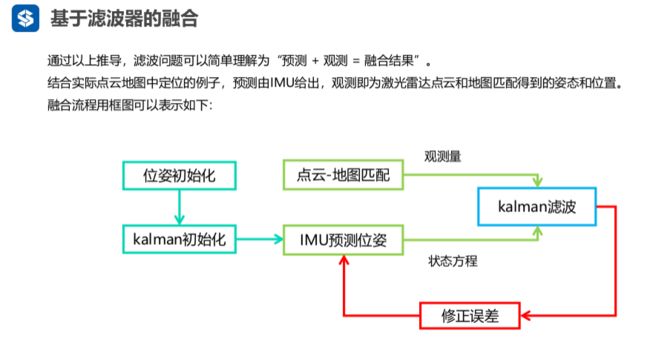
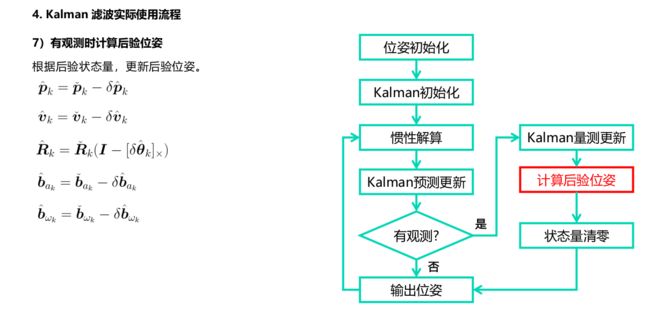
2.1 流程框图
2.2 代码结构
滤波算法主要包括预测(Update函数)和观测(Correct函数)两个部分:
- 预测部分接收imu数据,基于惯性解算更新名义值,基于状态方程更新误差值。
- 观测部分同时接收imu数据和定位数据,首先利用imu数据进行预测保证状态与定位数据
时间同步,然后基于观测方程计算误差值,最后利用误差值对名义值进行修正,并将误
差值清零。
2.3 初始化: Init
这里特别注意,框架是基于第一期课程,其中的旋转误差放在了导航系(n系)下,而第三期将旋转误差放在了机器人坐标系(b系)下,所以公式有所不同,特别是状态方程所用到的加速度应该是在b系下,也就是UpdateProcessEquation函数传入的linear_acc_mid应该是在b系下。所有调用到这个函数的地方都应该进行修改。
修改1:FUNCTION: ErrorStateKalmanFilter::ErrorStateKalmanFilter(const YAML::Node &node) {}
// set process equation in case of one step prediction & correction:
Eigen::Vector3d linear_acc_init(imu_data.linear_acceleration.x,
imu_data.linear_acceleration.y,
imu_data.linear_acceleration.z);
Eigen::Vector3d angular_vel_init(imu_data.angular_velocity.x,
imu_data.angular_velocity.y,
imu_data.angular_velocity.z);
// covert to navigation frame: // 把 IMU 的 velocity angular(flu系)转换到 导航系 下
linear_acc_init = linear_acc_init - accl_bias_; // body 系下
angular_vel_init = GetUnbiasedAngularVel(angular_vel_init, C_nb);
// init process equation, in case of direct correct step:
UpdateProcessEquation(linear_acc_init, angular_vel_init);
修改2:FUNCTION: ErrorStateKalmanFilter::GetVelocityDelta( )
bool ErrorStateKalmanFilter::GetVelocityDelta(
const size_t index_curr, const size_t index_prev,
const Eigen::Matrix3d &R_curr, const Eigen::Matrix3d &R_prev, double &T,
Eigen::Vector3d &velocity_delta, Eigen::Vector3d &linear_acc_mid) {
if (index_curr <= index_prev || imu_data_buff_.size() <= index_curr) {
return false;
}
const IMUData &imu_data_curr = imu_data_buff_.at(index_curr);
const IMUData &imu_data_prev = imu_data_buff_.at(index_prev);
T = imu_data_curr.time - imu_data_prev.time;
Eigen::Vector3d linear_acc_curr = Eigen::Vector3d(
imu_data_curr.linear_acceleration.x, imu_data_curr.linear_acceleration.y,
imu_data_curr.linear_acceleration.z);
Eigen::Vector3d a_curr = GetUnbiasedLinearAcc(linear_acc_curr, R_curr); // w系下的a_curr
Eigen::Vector3d linear_acc_prev = Eigen::Vector3d(
imu_data_prev.linear_acceleration.x, imu_data_prev.linear_acceleration.y,
imu_data_prev.linear_acceleration.z);
Eigen::Vector3d a_prev = GetUnbiasedLinearAcc(linear_acc_prev, R_prev); // w系下的a_prev
// mid-value acc can improve error state prediction accuracy:
linear_acc_mid = 0.5 * (a_curr + a_prev); // w 系下的linear_acc_mid , 用于更新pos_w 和 vel_w
velocity_delta = T * linear_acc_mid;
linear_acc_mid = 0.5 * (linear_acc_curr + linear_acc_prev) - accl_bias_; // b 系下的linear_acc_mid
return true;
}
这里有个之前一直忽略的点,在此mark下笔记:
inline Eigen::Vector3d ErrorStateKalmanFilter::GetUnbiasedAngularVel(
const Eigen::Vector3d &angular_vel, const Eigen::Matrix3d &R) {
return angular_vel - gyro_bias_;
}
inline Eigen::Vector3d
ErrorStateKalmanFilter::GetUnbiasedLinearAcc(const Eigen::Vector3d &linear_acc,
const Eigen::Matrix3d &R) {
return R * (linear_acc - accl_bias_) - g_;
}
两个函数,区别在于,惯性解算时
更新四元数时,只需要得到相对旋转,在body系下就可以得到相对旋转,所以不需要乘以R。
更新位置时,需要把速度转换到n系下,所以需要乘以R。
在init filter 初始化滤波器时,
angular_vel_init 、linear_acc_init 都是b 系下的
// 可以调用 GetUnbiasedAngularVel ,因为角速度仍然时在b系下的
angular_vel_init = GetUnbiasedAngularVel(angular_vel_init, C_nb);
// 不可以调用 GetUnbiasedLinearAcc ,因为调用后加速度换左乘R,变换到n系下的
linear_acc_init = linear_acc_init - accl_bias_; // body 系下
2.4 预测: Update
包含: 1.更新名义值UpdateOdomEstimation
2.更新误差值UpdateErrorEstimation
bool ErrorStateKalmanFilter::Update(const IMUData &imu_data) { // 更新
//
// TODO: understand ESKF update workflow
//
// update IMU buff:
if (time_ < imu_data.time) {
// update IMU odometry:
Eigen::Vector3d linear_acc_mid;
Eigen::Vector3d angular_vel_mid;
imu_data_buff_.push_back(imu_data);
UpdateOdomEstimation(linear_acc_mid, angular_vel_mid); // 更新名义值 , 惯性解算
imu_data_buff_.pop_front();
// update error estimation:
double T = imu_data.time - time_; // 滤波周期
UpdateErrorEstimation(T, linear_acc_mid, angular_vel_mid); // 更新误差估计
// move forward:
time_ = imu_data.time;
return true;
}
return false;
}
2.4.1 更新名义值 UpdateOdomEstimation
这部分是上一章惯性导航解算的内容;
void ErrorStateKalmanFilter::UpdateOdomEstimation( // 更新名义值
Eigen::Vector3d &linear_acc_mid, Eigen::Vector3d &angular_vel_mid) {
//
// TODO: this is one possible solution to previous chapter, IMU Navigation,
// assignment
//
// get deltas:
size_t index_curr_ = 1;
size_t index_prev_ = 0;
Eigen::Vector3d angular_delta = Eigen::Vector3d::Zero();
GetAngularDelta(index_curr_, index_prev_, angular_delta, angular_vel_mid); // 获取等效旋转矢量, 保存角速度中值
// update orientation:
Eigen::Matrix3d R_curr_ = Eigen::Matrix3d::Identity();
Eigen::Matrix3d R_prev_ = Eigen::Matrix3d::Identity();
UpdateOrientation(angular_delta, R_curr_, R_prev_); // 更新四元数
// get velocity delta:
double delta_t_;
Eigen::Vector3d velocity_delta_;
GetVelocityDelta(index_curr_, index_prev_, R_curr_, R_prev_, delta_t_, velocity_delta_, linear_acc_mid); // 获取速度差值, 保存线加速度中值
// save mid-value unbiased linear acc for error-state update:
// update position:
UpdatePosition(delta_t_, velocity_delta_);
}
这里需要注意,GetVelocityDelta函数中的linear_acc_mid应该返回在b系下的测量值
2.4.2 更新误差值UpdateErrorEstimation
首先调用UpdateProcessEquation计算状态方程中的F和B,该函数进一步调用SetProcessEquation函数

UpdateErrorEstimation()
void ErrorStateKalmanFilter::UpdateErrorEstimation( // 更新误差值
const double &T, const Eigen::Vector3d &linear_acc_mid,
const Eigen::Vector3d &angular_vel_mid) {
static MatrixF F_1st;
static MatrixF F_2nd;
// TODO: update process equation: // 更新状态方程
UpdateProcessEquation(linear_acc_mid , angular_vel_mid);
// TODO: get discretized process equations: // 非线性化
F_1st = F_ * T; // T kalman 周期
MatrixF F = MatrixF::Identity() + F_1st;
MatrixB B = MatrixB::Zero();
B.block<3, 3>(kIndexErrorVel, kIndexNoiseGyro) = B_.block<3, 3>(kIndexErrorVel, kIndexNoiseGyro) * T;
B.block<3, 3>(kIndexErrorOri, kIndexNoiseGyro) = B_.block<3, 3>(kIndexErrorOri, kIndexNoiseGyro) *T;
if(COV.PROCESS.BIAS_FLAG){
B.block<3, 3>(kIndexErrorAccel, kIndexNoiseBiasAccel) = B_.block<3, 3>(kIndexErrorAccel, kIndexNoiseBiasAccel)* sqrt(T);
B.block<3, 3>(kIndexErrorGyro, kIndexNoiseBiasGyro) = B_.block<3, 3>(kIndexErrorGyro, kIndexNoiseBiasGyro)* sqrt(T);
}
// TODO: perform Kalman prediction
X_ = F * X_;
P_ = F * P_ * F.transpose() + B * Q_ * B.transpose(); // 只有方差进行了计算
}
UpdateProcessEquation()
void ErrorStateKalmanFilter::UpdateProcessEquation(
const Eigen::Vector3d &linear_acc_mid,
const Eigen::Vector3d &angular_vel_mid) {
// set linearization point:
Eigen::Matrix3d C_nb = pose_.block<3, 3>(0, 0); // n2b 转换矩阵
Eigen::Vector3d f_b = linear_acc_mid + g_; // 加速度
Eigen::Vector3d w_b = angular_vel_mid; // 角速度
// set process equation:
SetProcessEquation(C_nb, f_b, w_b);
}
SetProcessEquation()
void ErrorStateKalmanFilter::SetProcessEquation(const Eigen::Matrix3d &C_nb, // 更新状态方程 F矩阵
const Eigen::Vector3d &f_b,
const Eigen::Vector3d &w_b) {
// TODO: set process / system equation:
// a. set process equation for delta vel:
F_.setZero();
F_.block<3, 3>(kIndexErrorPos, kIndexErrorVel) = Eigen::Matrix3d::Identity();
F_.block<3, 3>(kIndexErrorVel, kIndexErrorOri) = - C_nb * Sophus::SO3d::hat(f_b).matrix();
F_.block<3, 3>(kIndexErrorVel, kIndexErrorAccel) = -C_nb;
F_.block<3, 3>(kIndexErrorOri, kIndexErrorOri) = - Sophus::SO3d::hat(w_b).matrix();
F_.block<3, 3>(kIndexErrorOri, kIndexErrorGyro) = - Eigen::Matrix3d::Identity();
// b. set process equation for delta ori:
B_.setZero();
B_.block<3, 3>(kIndexErrorVel, kIndexNoiseGyro) = C_nb;
B_.block<3, 3>(kIndexErrorOri, kIndexNoiseGyro) = Eigen::Matrix3d::Identity();
if(COV.PROCESS.BIAS_FLAG){ // 判断是否考虑随机游走
B_.block<3, 3>(kIndexErrorAccel, kIndexNoiseBiasAccel) = Eigen::Matrix3d::Identity();
B_.block<3, 3>(kIndexErrorGyro, kIndexNoiseBiasGyro) = Eigen::Matrix3d::Identity();
}
}
2.5 观测 Correct
bool ErrorStateKalmanFilter::Correct(const IMUData &imu_data, // 修正
const MeasurementType &measurement_type,
const Measurement &measurement) {
static Measurement measurement_;
// get time delta:
double time_delta = measurement.time - time_;
if (time_delta > -0.05) { // 时间对齐
// perform Kalman prediction:
if (time_ < measurement.time) {
Update(imu_data);
}
// get observation in navigation frame:
measurement_ = measurement;
measurement_.T_nb = init_pose_ * measurement_.T_nb;
// correct error estimation:
CorrectErrorEstimation(measurement_type, measurement_);
// eliminate error:
EliminateError(); // 更新名义值
// reset error state:
ResetState(); // 清零误差值,方差保留
return true;
}
2.5.1 计算误差值 CorrectErrorEstimation
a. 首先调用CorrectErrorEstimationPose 计算 Y, G, K。
void ErrorStateKalmanFilter::CorrectErrorEstimationPose( // 计算 Y ,G ,K
const Eigen::Matrix4d &T_nb, Eigen::VectorXd &Y, Eigen::MatrixXd &G,
Eigen::MatrixXd &K) {
//
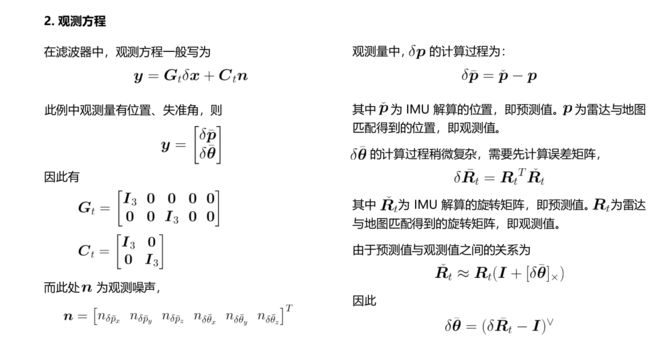
// TODO: set measurement: 计算观测 delta pos 、 delta ori
//
Eigen::Vector3d dp = pose_.block<3, 1>(0, 3) - T_nb.block<3, 1>(0, 3);
Eigen::Matrix3d dR = T_nb.block<3, 3>(0, 0).transpose() * pose_.block<3, 3>(0, 0) ;
// TODO: set measurement equation:
Eigen::Vector3d dtheta = Sophus::SO3d::vee(dR - Eigen::Matrix3d::Identity() );
YPose_.block<3, 1>(0, 0) = dp; // delta position
YPose_.block<3, 1>(3, 0) = dtheta; // 失准角
Y = YPose_;
// set measurement G
GPose_.setZero();
GPose_.block<3, 3>(0, kIndexErrorPos) = Eigen::Matrix3d::Identity();
GPose_.block<3 ,3>(3, kIndexErrorOri) = Eigen::Matrix3d::Identity();
G = GPose_;
// set measurement C
CPose_.setZero();
CPose_.block<3, 3>(0,kIndexNoiseAccel) = Eigen::Matrix3d::Identity();
CPose_.block<3, 3>(3,kIndexNoiseGyro) = Eigen::Matrix3d::Identity();
Eigen::MatrixXd C = CPose_;
// TODO: set Kalman gain:
Eigen::MatrixXd R = RPose_; // 观测噪声
K = P_ * G.transpose() * ( G * P_ * G.transpose( ) + C * RPose_* C.transpose() ).inverse() ;
}
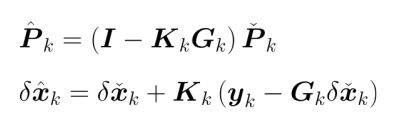
b. 更新后验,计算滤波的第4,5个公式
void ErrorStateKalmanFilter::CorrectErrorEstimation(
const MeasurementType &measurement_type, const Measurement &measurement) {
//
// TODO: understand ESKF correct workflow
//
Eigen::VectorXd Y;
Eigen::MatrixXd G, K;
switch (measurement_type) {
case MeasurementType::POSE:
CorrectErrorEstimationPose(measurement.T_nb, Y, G, K);
break;
default:
break;
}
// TODO: perform Kalman correct:
P_ = (MatrixP::Identity() - K*G) * P_ ; // 后验方差
X_ = X_ + K * (Y - G*X_); // 更新后的状态量
}
2.5.2 修正名义值 EliminateError
修正平移,速度,旋转和零偏,修正方式是预测值减去误差值。
void ErrorStateKalmanFilter::EliminateError(void) {
// 误差状态量 X_ : 15*1
// TODO: correct state estimation using the state of ESKF
//
// a. position:
// do it!
pose_.block<3, 1>(0, 3) -= X_.block<3, 1>(kIndexErrorPos, 0 ); // 减去error
// b. velocity:
// do it!
vel_ -= X_.block<3,1>(kIndexErrorVel, 0 );
// c. orientation:
// do it!
Eigen::Matrix3d dtheta_cross = Sophus::SO3d::hat(X_.block<3,1>(kIndexErrorOri, 0)); // 失准角的反对称矩阵
pose_.block<3, 3>(0, 0) = pose_.block<3, 3>(0, 0) * (Eigen::Matrix3d::Identity() - dtheta_cross);
Eigen::Quaterniond q_tmp(pose_.block<3, 3>(0, 0) );
q_tmp.normalize(); // 为了保证旋转矩阵是正定的
pose_.block<3, 3>(0, 0) = q_tmp.toRotationMatrix();
// d. gyro bias:
if (IsCovStable(kIndexErrorGyro)) {
gyro_bias_ -= X_.block<3, 1>(kIndexErrorGyro, 0); // 判断gyro_bias_error是否可观
}
// e. accel bias:
if (IsCovStable(kIndexErrorAccel)) {
accl_bias_ -= X_.block<3, 1>(kIndexErrorAccel, 0); // 判断accel_bias_error是否可观
}
}
2.5.3 清零误差值 ResetState

void ErrorStateKalmanFilter::ResetState(void) {
// reset current state:
X_ = VectorX::Zero();
}
Running
# build:
catkin_make
# set up session:
source devel/setup.bash
# launch:
roslaunch lidar_localization kitti_localization.launch
# play ROS bag, lidar-only KITTI:
rosbag play kitti_lidar_only_2011_10_03_drive_0027_synced.bag
# evo estimate
3.不考虑随机游走
3.1 公式推导
状态方程:
δ x ˙ = F t δ x + B t w \delta\dot{x}= F_t\delta{x} + B_tw δx˙=Ftδx+Btw
状态量:
δ p ˙ = δ v δ v ˙ = − R t [ a t − b a t ] × δ θ + R t ( n a − δ b a ) δ θ ˙ = − [ ω t − b ω t ] × δ θ + n ω − δ b ω δ b ˙ a = 0 δ b ˙ w = 0 \begin{array}{ll} \delta \dot{p} = \delta \boldsymbol{v} \\ \delta \dot{\boldsymbol{v}} =-\boldsymbol{R}_{t}\left[\boldsymbol{a}_{t}-\boldsymbol{b}_{a_{t}}\right]_{\times} \delta \boldsymbol{\theta}+\boldsymbol{R}_{t}\left(\boldsymbol{n}_{a}-\delta \boldsymbol{b}_{a}\right) \\ \delta \dot{\boldsymbol{\theta}} =-\left[\boldsymbol{\omega}_{t}-\boldsymbol{b}_{\omega_{t}}\right]_{\times} \delta \boldsymbol{\theta}+\boldsymbol{n}_{\omega}-\delta \boldsymbol{b}_{\omega} \\ \delta \dot{\boldsymbol{b}}_{a}=0 \\ \delta \dot{\boldsymbol{b}}_{w}=0 \\ \end{array} δp˙=δvδv˙=−Rt[at−bat]×δθ+Rt(na−δba)δθ˙=−[ωt−bωt]×δθ+nω−δbωδb˙a=0δb˙w=0
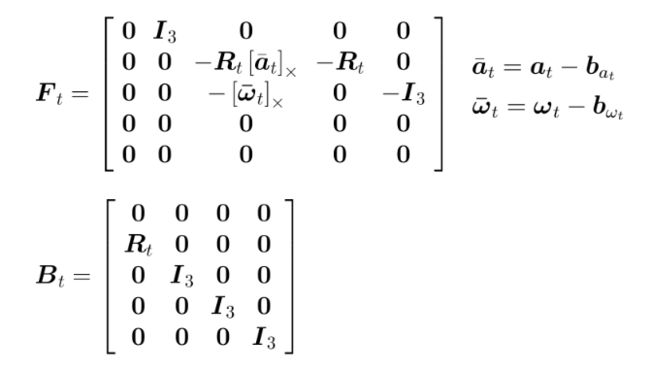
过程噪声部分:(线性kalman)
KaTeX parse error: Expected 'EOF', got '&' at position 126: …array}\right] &̲&&& \boldsymbol…
过程噪声部分:(非线性kalman)
KaTeX parse error: Expected 'EOF', got '&' at position 126: …array}\right] &̲&&& \boldsymbol…
3.2 修改部分
在 kitti_filtering.yaml 中添加bias_flag 选项,以选择是否考虑使用随机游走
FILE: /catkin_ws/src/lidar_localization/config/filtering/kitti_filtering.yaml
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process:
gyro: 1.0e-4
accel: 2.5e-3
bias_accel: 2.5e-3
bias_gyro: 1.0e-4
bias_flag: true
measurement:
pose:
pos: 1.0e-4
ori: 1.0e-4
pos: 1.0e-4
vel: 2.5e-3
Q矩阵
FILE: catkin_ws/src/lidar_localization/src/models/kalman_filter/error_state_kalman_filter.cpp
FUNCTION: ErrorStateKalmanFilter::ErrorStateKalmanFilter( )
// c. process noise: 过程噪声
Q_.block<3, 3>(kIndexNoiseAccel, kIndexNoiseAccel) = COV.PROCESS.ACCEL * Eigen::Matrix3d::Identity();
Q_.block<3, 3>(kIndexNoiseGyro, kIndexNoiseGyro) = COV.PROCESS.GYRO * Eigen::Matrix3d::Identity();
if (COV.PROCESS.BIAS_FLAG ){
Q_.block<3, 3>(kIndexNoiseBiasAccel, kIndexNoiseBiasAccel) = COV.PROCESS.BIAS_ACCEL * Eigen::Matrix3d::Identity();
Q_.block<3, 3>(kIndexNoiseBiasGyro, kIndexNoiseBiasGyro) = COV.PROCESS.BIAS_GYRO * Eigen::Matrix3d::Identity();
}
线性kalman B矩阵
FILE: catkin_ws/src/lidar_localization/src/models/kalman_filter/error_state_kalman_filter.cpp
FUNCTION: ErrorStateKalmanFilter::SetProcessEquation( )
// b. set process equation for delta ori:
B_.setZero();
B_.block<3, 3>(kIndexErrorVel, kIndexNoiseGyro) = C_nb;
B_.block<3, 3>(kIndexErrorOri, kIndexNoiseGyro) = Eigen::Matrix3d::Identity();
if(COV.PROCESS.BIAS_FLAG){ // 判断是否考虑随机游走
B_.block<3, 3>(kIndexErrorAccel, kIndexNoiseBiasAccel) = Eigen::Matrix3d::Identity();
B_.block<3, 3>(kIndexErrorGyro, kIndexNoiseBiasGyro) = Eigen::Matrix3d::Identity();
}
非线性kalman B矩阵
FILE: catkin_ws/src/lidar_localization/src/models/kalman_filter/error_state_kalman_filter.cpp
FUNCTION: ErrorStateKalmanFilter::UpdateErrorEstimation( )
MatrixB B = MatrixB::Zero();
B.block<3, 3>(kIndexErrorVel, kIndexNoiseGyro) = B_.block<3, 3>(kIndexErrorVel, kIndexNoiseGyro) * T;
B.block<3, 3>(kIndexErrorOri, kIndexNoiseGyro) = B_.block<3, 3>(kIndexErrorOri, kIndexNoiseGyro) *T;
if(COV.PROCESS.BIAS_FLAG){
B.block<3, 3>(kIndexErrorAccel, kIndexNoiseBiasAccel) = B_.block<3, 3>(kIndexErrorAccel, kIndexNoiseBiasAccel)* sqrt(T);
B.block<3, 3>(kIndexErrorGyro, kIndexNoiseBiasGyro) = B_.block<3, 3>(kIndexErrorGyro, kIndexNoiseBiasGyro)* sqrt(T);
}
3.3 结果
| filter with bias random walk | filter without bias random walk |
|---|---|
 |
 |
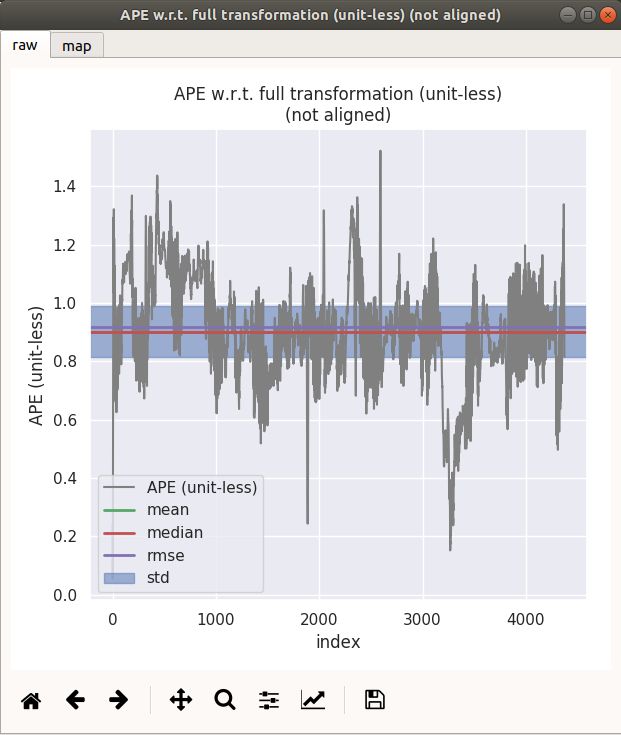 |
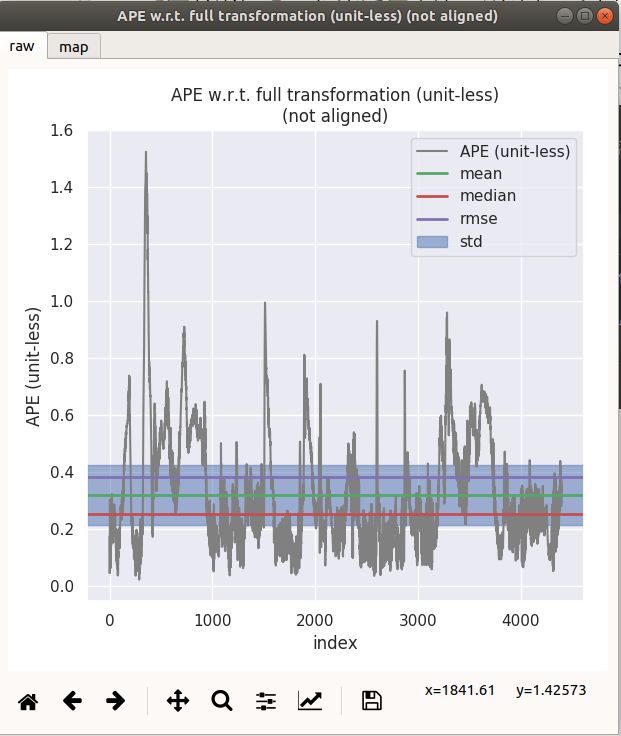 |
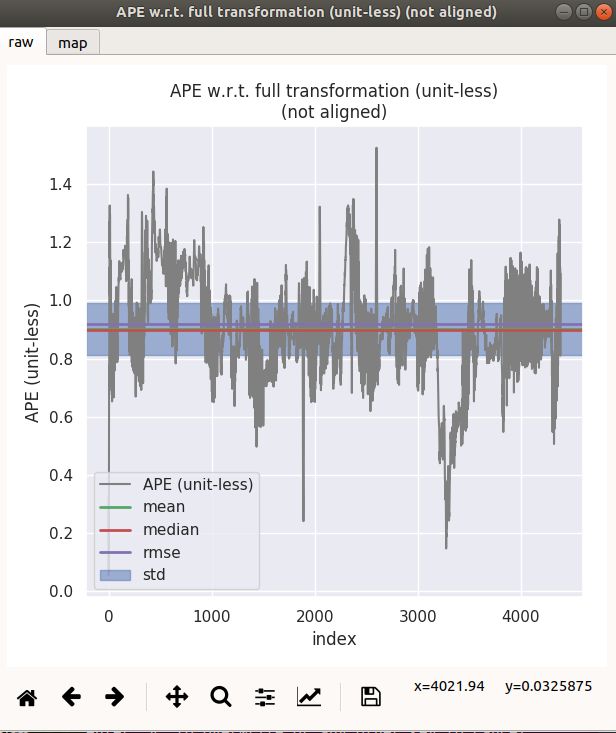
| max 1.521893 mean 0.901894 median 0.899981 min 0.054675 rmse 0.919171 sse 3695.484911 std 0.177375 |
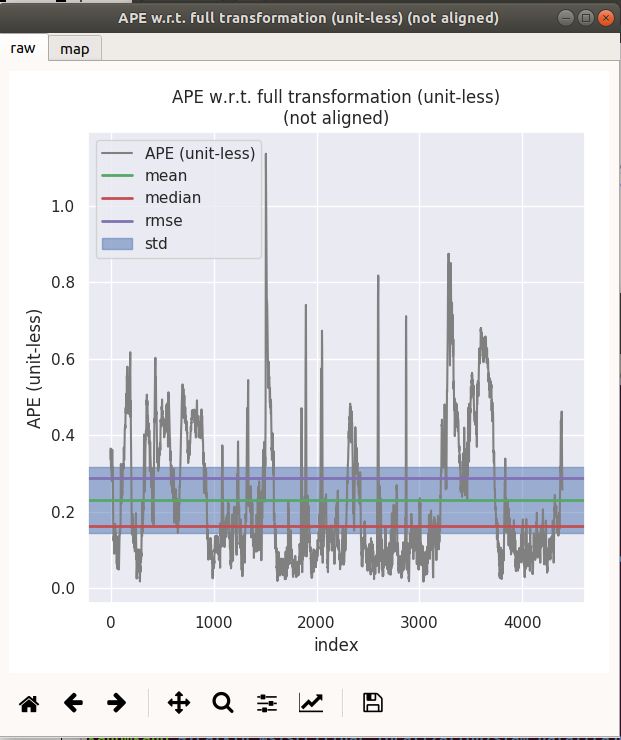
max 1.525035 mean 0.318024 median 0.251188 min 0.021889 rmse 0.381344 sse 638.991278 std 0.210439 |
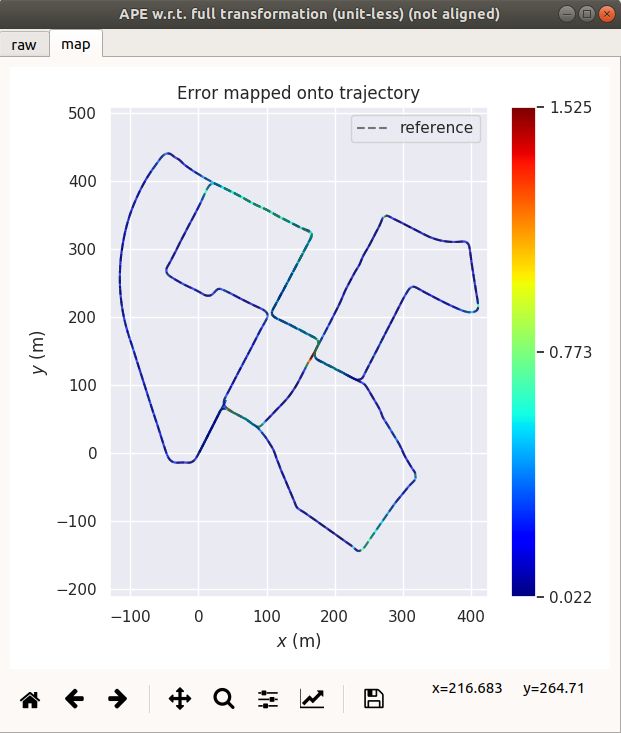
3.4 结果分析
从上述实验中,得知,有没有考虑随机游走影响并不是特别大,也可能是kitti数据集groundtruth 本身存在数据的问题。
4.调节ESKF Q、R参数,并进行数据对比
4.1 evo 评估指令
# set up session:
source devel/setup.bash
# save odometry:
rosservice call /save_odometry "{}"
# run evo evaluation:
# a. laser 输出评估结果,并以zip的格式存储:
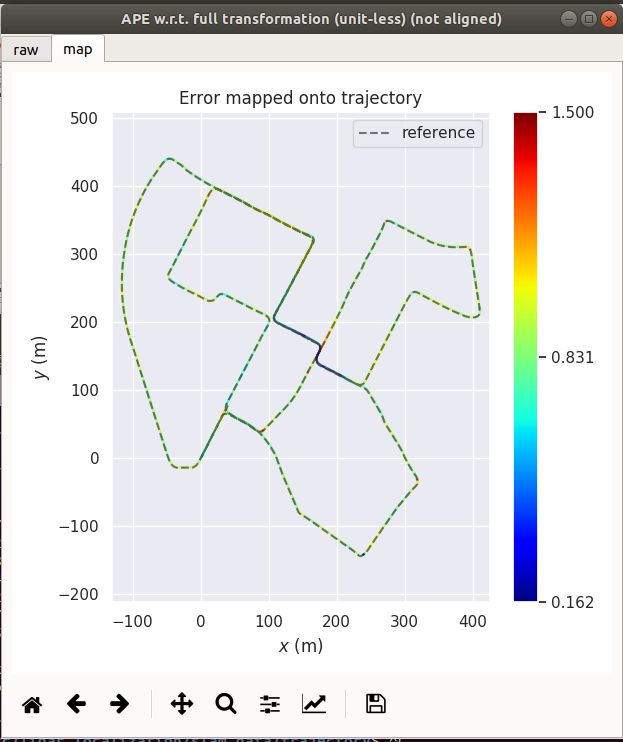
evo_ape kitti ground_truth.txt laser.txt -r full --plot --plot_mode xy --save_results ./laser.zip
# b. fused 输出评估结果,并以zip的格式存储:
evo_ape kitti ground_truth.txt fused.txt -r full --plot --plot_mode xy --save_results ./fused.zip
#c. 比较 laser fused 一并比较评估
evo_res *.zip -p
4.2 eskf 调参手段
本调试方法,得益于梓杰大佬的点拨,仅供参考~
主要调节 过程噪声 Q和观测噪声 R, 过程噪声与观测噪声一般在 kalman 迭代过程中保持不变。
KaTeX parse error: Expected 'EOF', got '&' at position 176: …{array}\right] &̲&&&\quad \bolds…
可通过evo_res 指令 对比观察 laser_odom 和 fused_odom 的 APE曲线。若两者的曲线大致一致,且误差较大,则证明,滤波后的轨迹大致和观测一样 。说明观测噪声®给的小了,导致滤波后,融合的轨迹对观测的置信度更高,所以出现滤波后的轨迹和观测更像,这时应该适当把观测噪声® 加大,过程噪声(Q) 减少。同理反向调节。
rosservice call /save_odometry "{}"
evo_ape kitti ground_truth.txt laser.txt -r full --plot --plot_mode xy --save_results ./laser.zip
evo_ape kitti ground_truth.txt fused.txt -r full --plot --plot_mode xy --save_results ./fused.zip
evo_res *.zip -p
for example : 以 parametr3 为例子
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process: #过程噪声 Q
gyro: 1.0e-5
accel: 2.5e-4
bias_accel: 2.5e-4
bias_gyro: 1.0e-5
bias_flag: true
measurement: #观测噪声 R
pose:
pos: 1.0e-2
ori: 1.0e-2
pos: 1.0e-4
vel: 2.5e-3
结果: 从下表可知,fused 结果误差比laser的误差要大,证明对现在对预测(IMU)的置信度较高,观测(LIDAR)的置信度较低。
调整: 提高观测的置信度,降低预测的置信度;相应地:减少观测噪声® , 增大过程噪声(Q)
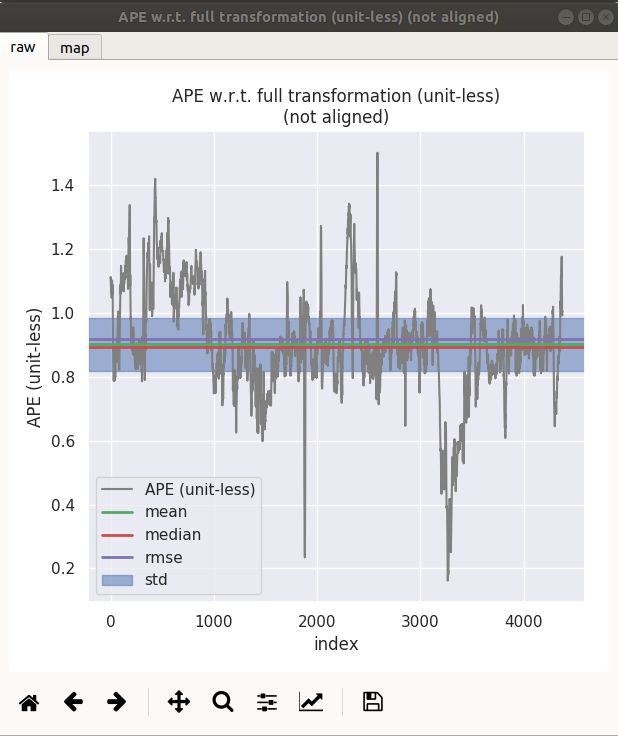
APE w.r.t. full transformation (unit-less)
(not aligned)
max mean median min rmse sse std
fused.txt 1.59676 0.90307 0.902652 0.0591278 0.922722 3725.8 0.189423
laser.txt 1.50034 0.901495 0.893804 0.161967 0.916559 3676.19 0.165489


调整后 : parameter 2为例子
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process: #过程噪声 Q 增大
gyro: 1.0e-4
accel: 2.5e-3
bias_accel: 2.5e-3
bias_gyro: 1.0e-4
bias_flag: true
measurement: #观测噪声 R 减小
pose:
pos: 1.0e-4
ori: 1.0e-4
pos: 1.0e-4
vel: 2.5e-3
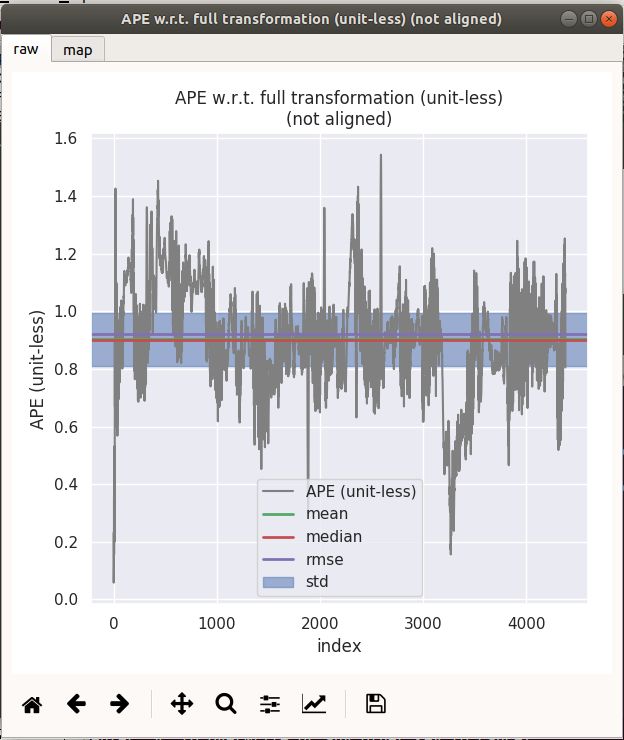
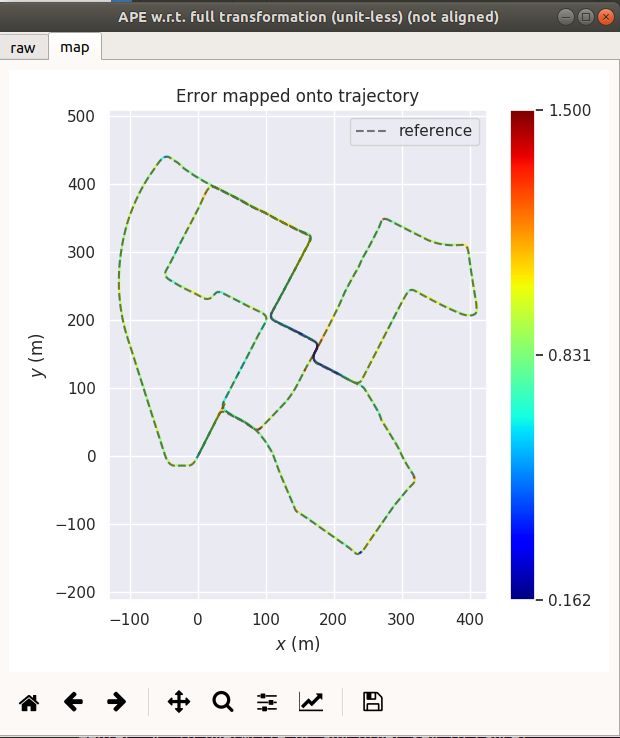
结果:调整过后,fused 的轨迹误差降低,观测的置信度更高
APE w.r.t. full transformation (unit-less)
(not aligned)
max mean median min rmse sse std
fused.txt 1.52392 0.901544 0.898788 0.054487 0.918868 3703.18 0.177588
laser.txt 1.50034 0.90192 0.89412 0.161967 0.916964 3687.85 0.1654


4.3 不同参数结果对比
parameter 1
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process: #过程噪声 Q
gyro: 1.0e-5
accel: 2.5e-4
bias_accel: 2.5e-4
bias_gyro: 1.0e-5
bias_flag: true
measurement: #观测噪声 R
pose:
pos: 1.0e-3
ori: 1.0e-3
pos: 1.0e-4
vel: 2.5e-3
evo estimate
| Lidar Only | IMU-Lidar Fusion |
|---|---|
 |
 |
 |
 |
| max 1.500344 mean 0.901495 median 0.893804 min 0.161967 rmse 0.916559 sse 3676.188909 std 0.165489 |
max 1.542837 mean 0.902142 median 0.899435 min 0.058398 rmse 0.920858 sse 3714.999803 std 0.184716 |
parameter 2
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process: #过程噪声 Q
gyro: 1.0e-4
accel: 2.5e-3
bias_accel: 2.5e-3
bias_gyro: 1.0e-4
bias_flag: true
measurement: #观测噪声 R
pose:
pos: 1.0e-4
ori: 1.0e-4
pos: 1.0e-4
vel: 2.5e-3
evo estimate
| Lidar Only | IMU-Lidar Fusion |
|---|---|
 |
 |
 |
 |
| max 1.500344 mean 0.901920 median 0.894120 min 0.161967 rmse 0.916964 sse 3687.845753 std 0.165414 |
max 1.523916 mean 0.901544 median 0.898788 min 0.054487 rmse 0.918868 sse 3703.181677 std 0.177588 |
parameter 3
过程噪声调小,观测噪声调大,理论现象:IMU惯性解算的置信度更高
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process: #过程噪声 Q
gyro: 1.0e-5
accel: 2.5e-4
bias_accel: 2.5e-4
bias_gyro: 1.0e-5
bias_flag: true
measurement: #观测噪声 R
pose:
pos: 1.0e-2
ori: 1.0e-2
pos: 1.0e-4
vel: 2.5e-3
evo estimate
| Lidar Only | IMU-Lidar Fusion |
|---|---|
 |
 |
 |
 |
| max 1.500344 mean 0.901495 median 0.893804 min 0.161967 rmse 0.916559 sse 3676.188909 std 0.165489 |
max 1.596762 mean 0.903070 median 0.902652 min 0.059128 rmse 0.922722 sse 3725.795851 std 0.189423 |
parameter 4
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process: #过程噪声 Q
gyro: 1.0e-4
accel: 2.5e-3
bias_accel: 2.5e-3
bias_gyro: 1.0e-4
bias_flag: true
measurement: #观测噪声 R
pose:
pos: 1.0e-5
ori: 1.0e-5
pos: 1.0e-4
vel: 2.5e-3
evo estimate
| Lidar Only | IMU-Lidar Fusion |
|---|---|
 |
 |
 |
 |
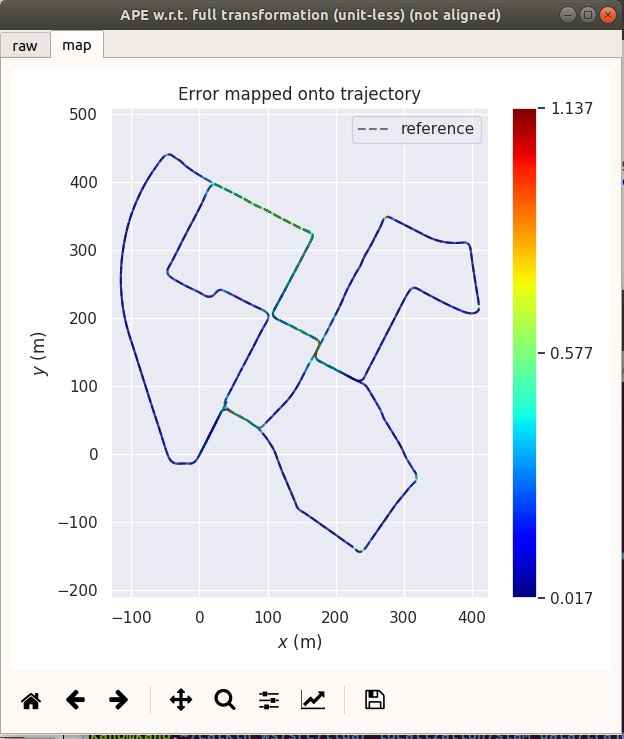
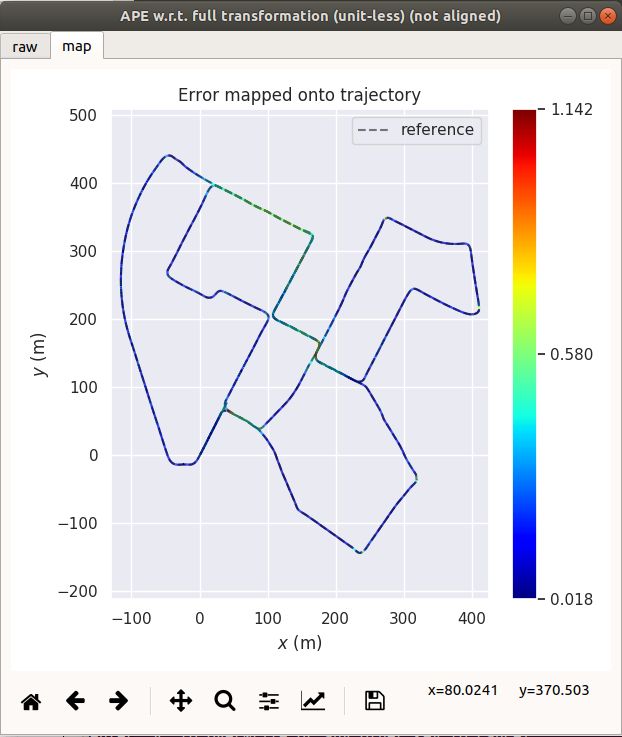
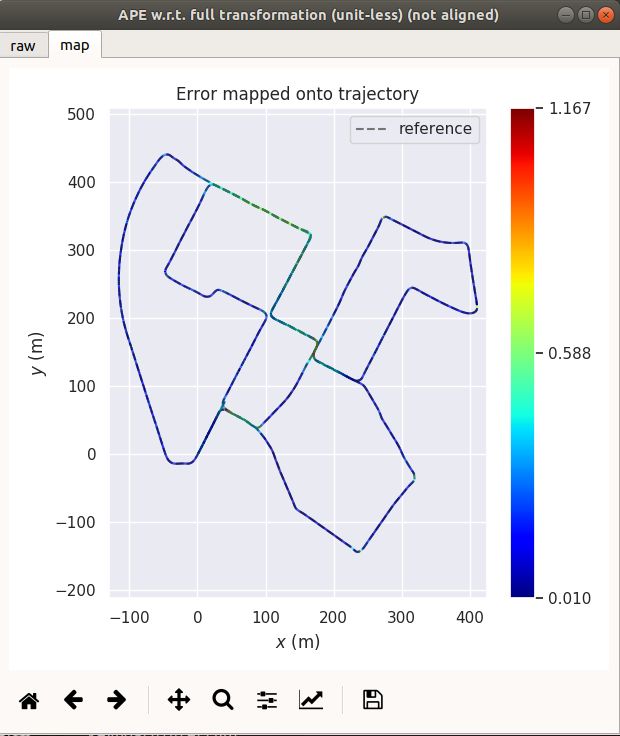
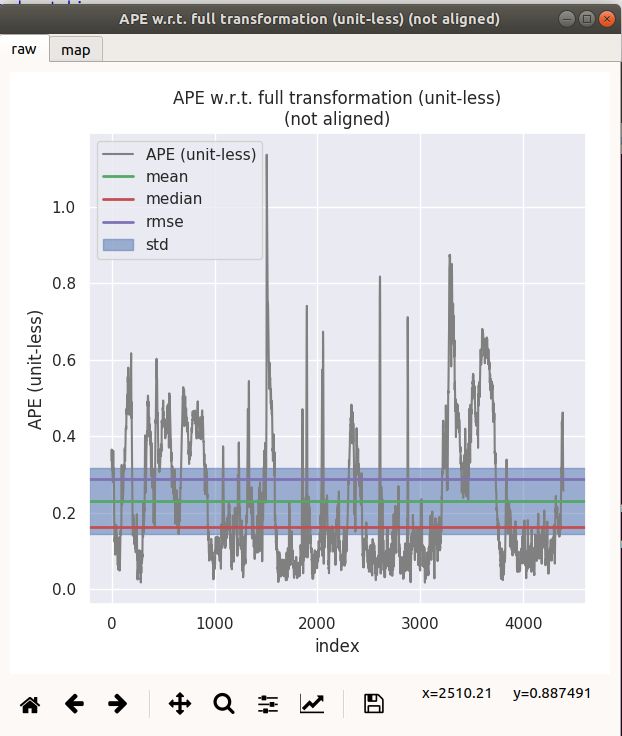
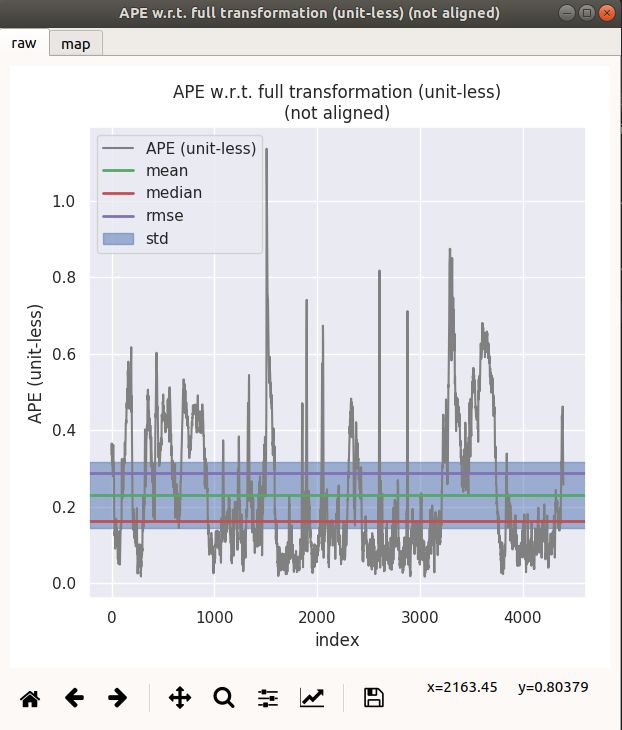
| max 1.136680 mean 0.230984 median 0.163519 min 0.017465 rmse 0.289158 sse 367.057912 std 0.173951 |
max 1.166536 mean 0.244853 median 0.187717 min 0.010400 rmse 0.298805 sse 391.959520 std 0.171264 |
parameter 5
过程噪声调小,观测噪声调大,理论现象:IMU惯性解算的置信度更高
covariance:
prior:
pos: 1.0e-6
vel: 1.0e-6
ori: 1.0e-6
epsilon: 1.0e-6
delta: 1.0e-6
process: #过程噪声 Q
gyro: 1.0e-6
accel: 2.5e-6
bias_accel: 2.5e-6
bias_gyro: 1.0e-6
bias_flag: true
measurement: #观测噪声 R
pose:
pos: 1.0e-2
ori: 1.0e-2
pos: 1.0e-4
vel: 2.5e-3
evo estimate
| Lidar Only | IMU-Lidar Fusion |
|---|---|
 |
 |
 |
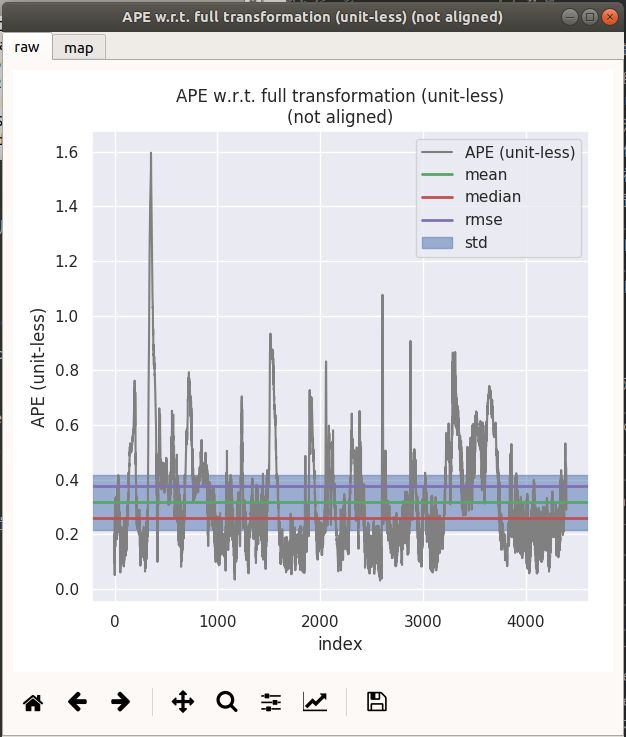 |
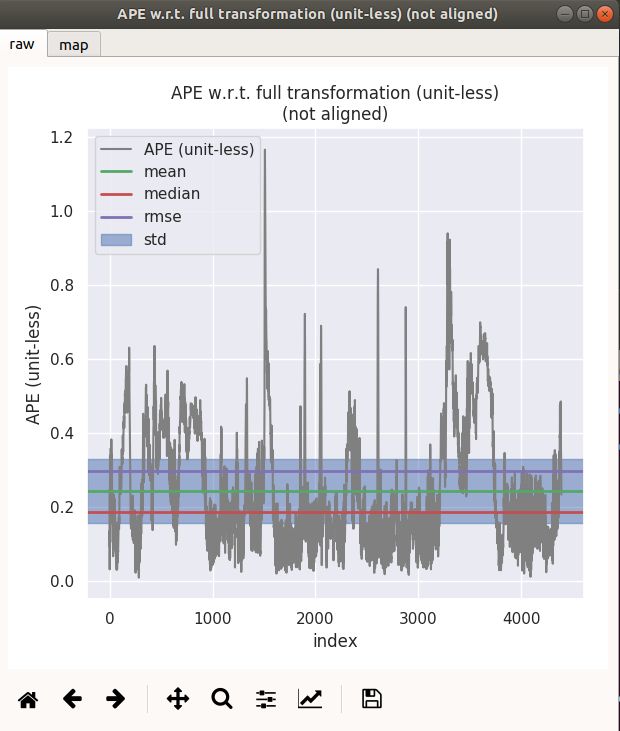
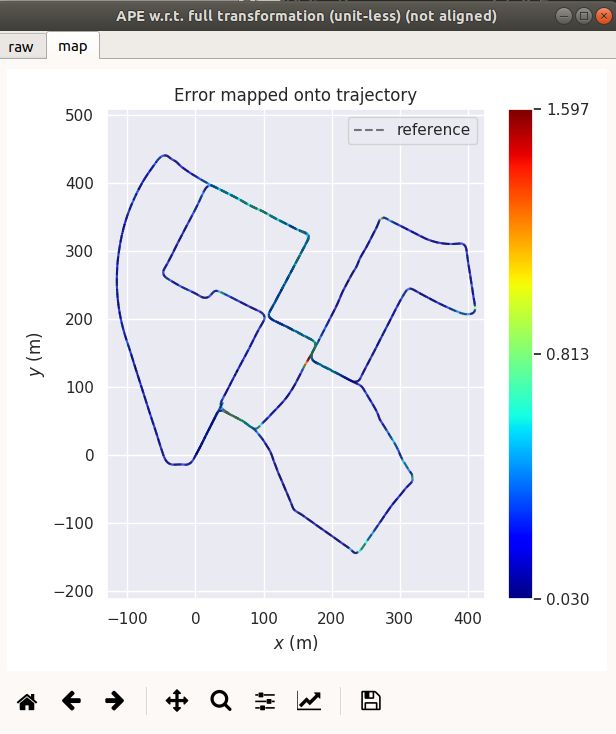
| max 1.136680 mean 0.230928 median 0.163564 min 0.017465 rmse 0.289055 sse 367.297769 std 0.173854 |
max 1.596545 mean 0.317060 median 0.259280 min 0.029770 rmse 0.375757 sse 620.687408 std 0.201660 |
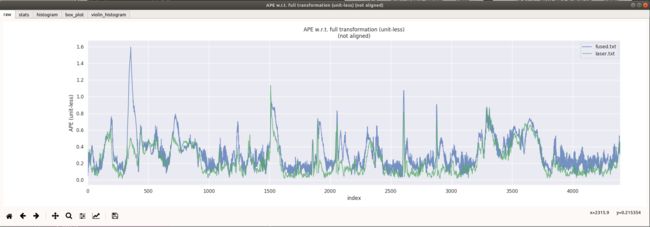
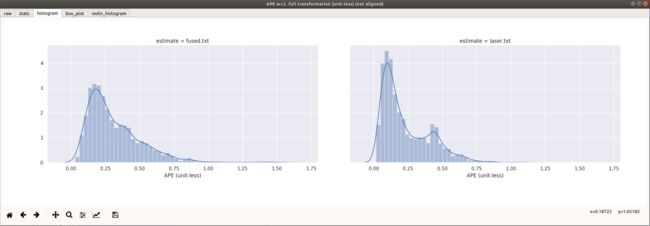
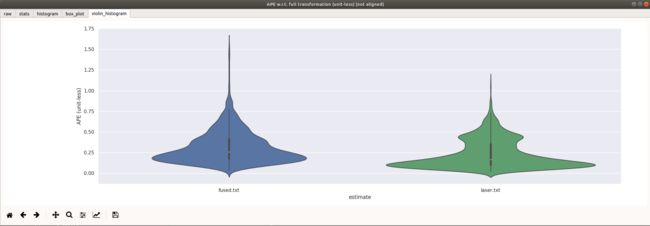
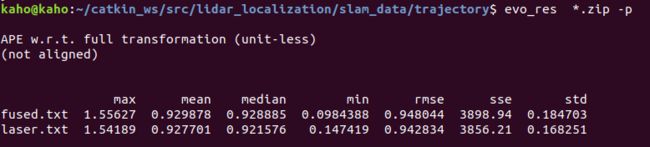
如下图 evo_res 对比可得知,过程噪声调小,观测噪声调大,理论现象:IMU惯性解算的置信度更高, fused的误差结果和曲线有别于odom,现象正确。
max mean median min rmse sse std
fused.txt 1.59655 0.31706 0.25928 0.0297698 0.375757 620.687 0.20166
laser.txt 1.13668 0.230928 0.163564 0.0174648 0.289055 367.298 0.173854
5. Gnss 定位原点初始化 bug 修复
现象描述:
1.多次运行第七章课程框架中kalman filter localization 时,结束后,laser_odom 的evo 精度评估数据都不太一样,ape mean 从 0.2 到 4,均有变化。
解决:
FILE : catkin_ws/src/lidar_localization/src/filtering/kitti_filtering_flow.cpp
初始化滤波部分,使用的是scancontext,可能是sc 初始化出现问题,导致每次数据都有差别,所以打算换成“第四章”的gnss初始化。
bool KITTIFilteringFlow::InitLocalization(void) {
// ego vehicle velocity in body frame:
Eigen::Vector3f init_vel = current_pos_vel_data_.vel;
first try to init using scan context query:
if (filtering_ptr_->Init(current_cloud_data_, init_vel,
current_imu_synced_data_)) {
// // prompt:
LOG(INFO) << "Scan Context Localization Init Succeeded." << std::endl;
}
return true;
}
修改如下:
filtering_ptr_ -> Init()
在 FILE: catkin_ws/src/lidar_localization/src/filtering/kitti_filtering.cpp 框架中,已定义好 使用 scancontext 和 gnss 两种init pose的方式,无需我们再写
/* scan contexxt 初始化 pose , 输入 point cloud_*/
bool KITTIFiltering::Init(const CloudData &init_scan,
const Eigen::Vector3f &init_vel,
const IMUData &init_imu_data) {
if (SetInitScan(init_scan)) {
current_vel_ = init_vel;
kalman_filter_ptr_->Init(current_vel_.cast<double>(), init_imu_data);
return true;
}
return false;
}
/* gnss 初始化 pose , 输入 martix4d current_gnss_pose_*/
bool KITTIFiltering::Init(const Eigen::Matrix4f &init_pose,
const Eigen::Vector3f &init_vel,
const IMUData &init_imu_data) {
if (SetInitGNSS(init_pose)) {
current_vel_ = init_vel;
kalman_filter_ptr_->Init(current_vel_.cast<double>(), init_imu_data);
return true;
}
return false;
}
修改 1 : InitLocalization() 调用 Init() 方法
FILE : catkin_ws/src/lidar_localization/src/filtering/kitti_filtering_flow.cpp
bool KITTIFilteringFlow::InitLocalization(void) {
// ego vehicle velocity in body frame:
Eigen::Vector3f init_vel = current_pos_vel_data_.vel;
// first try to init using scan context query:
// if (filtering_ptr_->Init(current_cloud_data_, init_vel,
// current_imu_synced_data_)) {
// // prompt:
// LOG(INFO) << "Scan Context Localization Init Succeeded." << std::endl;
// }
// first try to init using gnss init:
if (filtering_ptr_->Init(current_gnss_data_.pose, init_vel,
current_imu_synced_data_)){
// prompt:
LOG(INFO) << "Gnss Localization Init Succeeded." << std::endl;
}
return true;
}
修改2 : 按照第四章gnss 初始化的部分修改, 初始化经纬高
通过记录获得建图时gnss 原点坐标为:
latitude = 48.9825452359;
longitude = 8.39036610005;
altitude = 116.382141113;
将建图原点的"经纬高" 转换为到导航系(ENU系)下的原点
FILE: lidar_localization/src/sensor_data/gnss_data.cpp
void GNSSData::InitOriginPosition() {
geo_converter.Reset(48.982658, 8.390455, 116.396412); // 设置原点
origin_longitude = longitude;
origin_latitude = latitude;
origin_altitude = altitude;
origin_position_inited = true;
}
修改3 : 修复 current_gnss_data_ 没有更新问题
现象:按照如上方法,修改后,运行程序,初始化的gnss pose,发现定位有问题,通过打印 current_gnss_data_.pose,发现无论数据集在哪个地方开始播放,init gnss pose的值都是一个 4x4 的 单位阵,明显不正确。
问题所在: current_gnss_data_.pose 在本章节的框架中,只在save_odometry 保存groundtruth.txt 数据集被赋值,在其他地方没有被更新。
原框架中只在save_odometry 中更新 current_gnss_data_.pose
bool KITTIFilteringFlow::SaveOdometry(void) {
if (0 == trajectory.N) {
return false;
}
// init output files:
std::ofstream fused_odom_ofs;
std::ofstream laser_odom_ofs;
std::ofstream ref_odom_ofs;
if (!FileManager::CreateFile(fused_odom_ofs,
WORK_SPACE_PATH +
"/slam_data/trajectory/fused.txt") ||
!FileManager::CreateFile(laser_odom_ofs,
WORK_SPACE_PATH +
"/slam_data/trajectory/laser.txt") ||
!FileManager::CreateFile(ref_odom_ofs,
WORK_SPACE_PATH +
"/slam_data/trajectory/ground_truth.txt")) {
return false;
}
// write outputs:
for (size_t i = 0; i < trajectory.N; ++i) {
// sync ref pose with gnss measurement:
while (!gnss_data_buff_.empty() &&
(gnss_data_buff_.front().time - trajectory.time_.at(i) <= -0.05)) {
gnss_data_buff_.pop_front();
}
if (gnss_data_buff_.empty()) {
break;
}
current_gnss_data_ = gnss_data_buff_.front();
const Eigen::Vector3f &position_ref =
current_gnss_data_.pose.block<3, 1>(0, 3);
const Eigen::Vector3f &position_lidar =
trajectory.lidar_.at(i).block<3, 1>(0, 3);
if ((position_ref - position_lidar).norm() > 3.0) {
continue;
}
SavePose(trajectory.fused_.at(i), fused_odom_ofs);
SavePose(trajectory.lidar_.at(i), laser_odom_ofs);
SavePose(current_gnss_data_.pose, ref_odom_ofs);
}
return true;
}
解决
在 InitLocalization() 函数中,更新current_gnss_data_
注意:这里有个地方需要注意的是,GNSS数据一般前几帧都是不准确,所以我们舍弃前三帧, 取第四帧, 需要对 SetInitGNSS 函数进行修改一下,修改为使用第四帧的gnss数据进行gnss pose 初始化。
FILE : catkin_ws/src/lidar_localization/src/filtering/kitti_filtering_flow.cpp
bool KITTIFilteringFlow::InitLocalization(void) {
// ego vehicle velocity in body frame:
Eigen::Vector3f init_vel = current_pos_vel_data_.vel;
// first try to init using scan context query:
// if (filtering_ptr_->Init(current_cloud_data_, init_vel,
// current_imu_synced_data_)) {
// // prompt:
// LOG(INFO) << "Scan Context Localization Init Succeeded." << std::endl;
// }
// first try to init using gnss init:
static int gnss_count = 0;
if(!(gnss_count >3)){
current_gnss_data_ = gnss_data_buff_.at(gnss_count); // 舍弃GNSS的第三帧数据
// std::cout << " gnss_data_buff_ " << gnss_count << " " << current_gnss_data_.pose << std::endl;
}
gnss_count ++ ;
if (filtering_ptr_->Init(current_gnss_data_.pose, init_vel,
current_imu_synced_data_)){
// prompt:
LOG(INFO) << "Gnss Localization Init Succeeded." << std::endl;
}
return true;
}
FILE : catkin_ws/src/lidar_localization/src/filtering/kitti_filtering.cpp
bool KITTIFiltering::SetInitGNSS(const Eigen::Matrix4f &gnss_pose) {
static int gnss_cnt = 0;
current_gnss_pose_ = gnss_pose;
// if (gnss_cnt == 0) { // 一般gnss 数据,前几帧都不准,所以取第三帧
// SetInitPose(gnss_pose);
// } else if (gnss_cnt > 3) {
// has_inited_ = true;
// }
if (gnss_cnt > 3) {
has_inited_ = true;
}
SetInitPose(gnss_pose);
gnss_cnt++;
return true;
}
结果:
1.能够成功实现gnss 初始化,并在地图任意一点启动,初始化成功。
2.经过6次,同一套kalman 参数的实验,得出的evo 结果大致一样,可以认为修复了 每次启动evo评估结果不同的问题。

六次同一参数 evo 评估结果 ,大致相等
 |
|---|
 |
 |
 |
 |
 |
edited by kaho 2021.10.12