强化学习DQN并玩CartPole游戏
强化学习DQN并玩CartPole游戏
1、强化学习
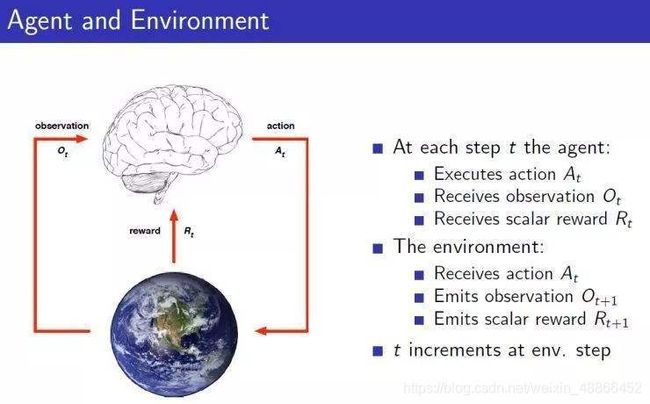
一张经典的关于强化学习的图。
一个代理(Agent)存在一个空间中,并观察环境,得到该环境的状态(observation),于是做出一个动作(action),一旦发出了动作则会改变环境,环境的改变则产生一个回报(reward)给代理,回报有正有负、有大有小。
强化学习是,让代理在该环境中生存。不断地试错,以试图获取最大的回报。
这便是强化学习的过程。
2、马尔科夫链
在代理不断地观察环境做出动作得到回报,观察环境做出动作得到回报,…,观察环境做出动作得到回报中。
这是一步一步的离散的动作着的,于是构成了一条马尔可夫链。
马尔可夫链(Markov chain),又称离散时间马尔可夫链(discrete-time Markov chain),为离散的序列链条,为状态空间中经过从一个状态到另一个状态的转换的随机过程。
不过马尔科夫链要求具备“无记忆”的性质:下一状态的概率分布只能由当前状态决定,在时间序列中它前面的事件均与之无关。
P ( x t ∣ x t − 1 , x t − 2 , . . . , x t − n ) = P ( x t ∣ x t − 1 ) P(x_{t}|x_{t-1},x_{t-2},...,x_{t-n})=P(x_{t}|x_{t-1}) P(xt∣xt−1,xt−2,...,xt−n)=P(xt∣xt−1)
即从状态 x t − 1 x_{t-1} xt−1转移到状态 x t x_{t} xt的概率,只和上一状态 x t − 1 x_{t-1} xt−1有关,而和之前的没有关系。
3、贝尔曼方程
那么在一个状态到另一状态的转变过程中,应该选择什么样的动作呢?
我们可以预测回报的多少来进行决策,选择那一个动作,即那一动作回报多则选择那一动作。
但是当前的回报并非我们最终的目标。
比如,在围棋中,有一围棋死活问题中一种独特的棋形,倒脱靴。
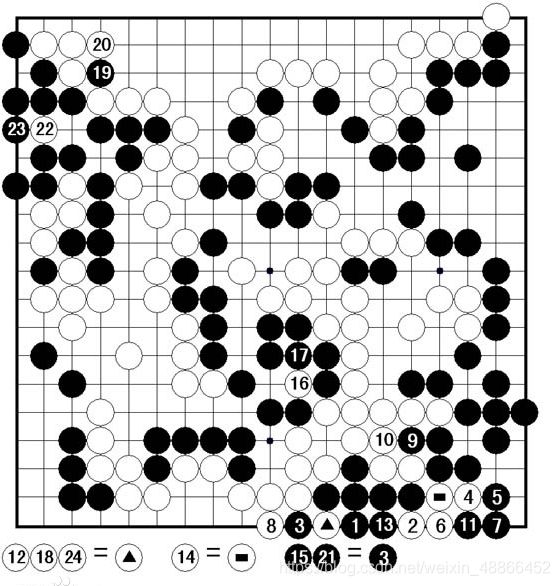
在如图的例子中,白8提掉黑四子后,黑棋第九手走到△的位置上,反吃掉白三子,成为活棋。
对黑棋来讲是先得到负回报,然后在得到极大的正回报。故需要看到未来的一个回报,而非仅仅眼前的利益(当前的正回报可能会造成最终的负回报,输掉整盘棋)。
于是定义R为最终的参考回报, r t r_{t} rt为立即回报。于是R应该等于当前时刻的立即回报,同时要加上下一时刻、下下时刻、…、一直到最终:
R t = r t + r t + 1 + r t + 2 + . . . + r t + n R_{t} = r_{t} + r_{t+1} + r_{t+2}+...+r_{t+n} Rt=rt+rt+1+rt+2+...+rt+n
但未来的事情尚未发生。过多考虑未来的不稳定的事情,容易造成前期的崩溃。基于这种不确定性,故需要加上一个衰减的系数。于是得:
R t = r t + γ r t + 1 + γ 2 r t + 2 + . . . + γ n r t + n R_{t} = r_{t} + \gamma r_{t+1} + \gamma^{2}r_{t+2}+...+\gamma^{n}r_{t+n} Rt=rt+γrt+1+γ2rt+2+...+γnrt+n
此为贝尔曼方程,也称价值方程。
γ \gamma γ 取值0~1。
γ \gamma γ取0的话,就是过分短视,只参考当前回馈,就如认为世事无常及时行乐的人。
γ \gamma γ取1的话,则是过分考虑长远,而不顾当前回馈的恶化,导致无法抵达遥远未来。
则未来离得越远,则参考的价值越小,除非未来的回报足够大。
R能求解出来吗?在未来不确定情况下,无法计算,是无解的。
但未来可期,可通过其期望来求解。虽然每一个回报是不稳定的,但是期望是稳定的。
则:
V = E ( R t ) V = E(R_{t}) V=E(Rt)
回报的期望,为价值。
4、Q函数
R t = r t + γ r t + 1 + γ 2 r t + 2 + . . . + γ n r t + n = r t + γ ( r t + 1 + γ ( r t + 2 + . . . ) ) = r t + γ R t + 1 R_{t} = r_{t} + \gamma r_{t+1} + \gamma^{2}r_{t+2}+...+\gamma^{n}r_{t+n} \\=r_{t} + \gamma (r_{t+1} + \gamma (r_{t+2}+...))\\ =r_{t} + \gamma R_{t+1} Rt=rt+γrt+1+γ2rt+2+...+γnrt+n=rt+γ(rt+1+γ(rt+2+...))=rt+γRt+1
贝尔曼方程可变形为上式。
那么当我们考虑当前状态下,选择某一动作能够带来的价值时,应该为下式:
Q ( s , a ) = r + γ m a x a ′ Q ( s ′ , a ′ ) Q(s,a) = r + \gamma max_{a^{'}}Q(s^{'},a^{'}) Q(s,a)=r+γmaxa′Q(s′,a′)
即:某一状态下选择的某一动作的价值 = 环境反馈回的回报 + 下一状态下能带来的最大价值 X 衰减值。
此为Q函数。
但是在我们不知道未来如何的时候,为了知道每一状态下、每一动作的价值,则需要多次试验。
举例一个经典小游戏说明:
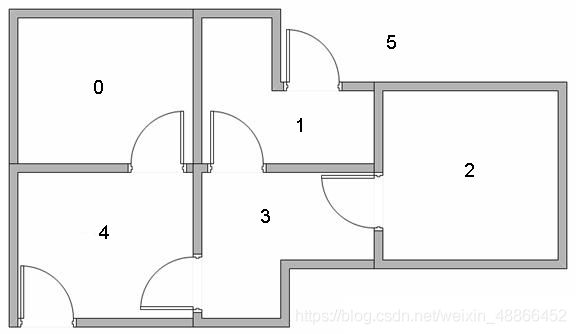
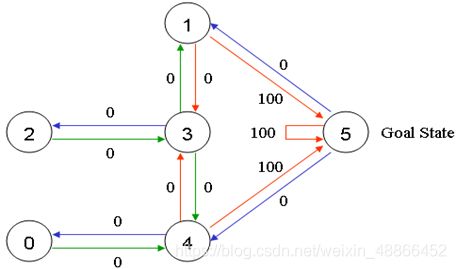
一个小游戏,机器人随机放置在任意房间里,标识为0、1、2、3、4。现在需要走出外界,标识为5。
于是将每一个房间标识为一个节点。可以画出状态转移图形为:
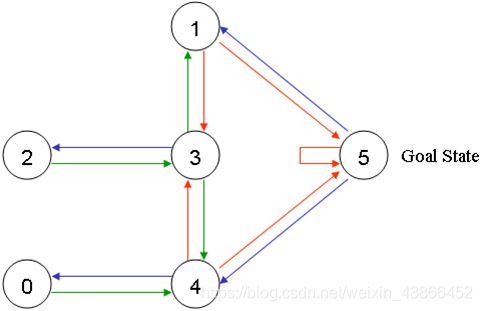
我们规定,当机器人走到户外,即状态5时,获得奖励100。则图为:
将其写为矩阵,为:
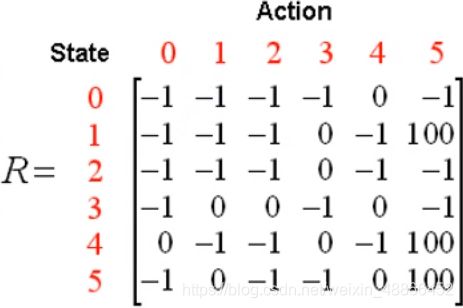
这是当处在何种状态,然后选择何种动作,给出何种回报的回报矩阵。
例如,当机器人处在房间3时,可采取的动作为1、2、4,当采取动作1时,回报为0。当机器人处在房间4时,如果采取动作5,则返回回报100;如果是采取动作3,则回报为0。
至此,我们需要计算出每一个状态下,每一种行动的价值。比如这样:
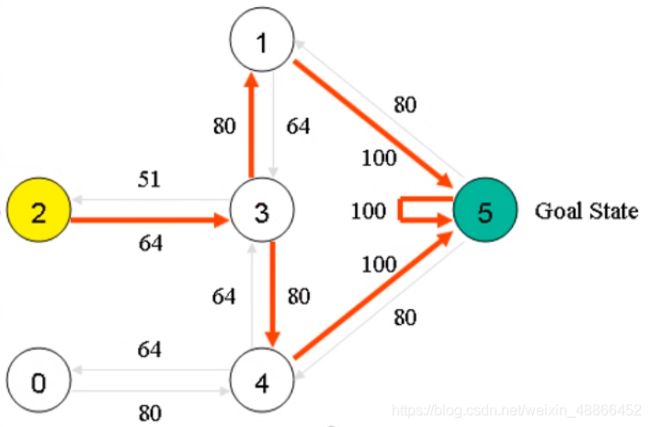
如此便能非常容易的选择什么样的策略,即价值最大的动作。
但是当我们的价值未知的时候,则定义一个零矩阵,通过回报矩阵,迭代优化它。

由Q函数,可知该矩阵如何优化:
Q [ s t , a ] = R [ s t , a ] + γ m a x ( Q ( s t + 1 , : ) ) Q[s_{t},a] = R[s_{t},a] + \gamma max(Q(s_{t+1},:)) Q[st,a]=R[st,a]+γmax(Q(st+1,:))
即更新当前状态选择的当前动作的价值时,等于此时的回报(当前状态选择的当前动作的回报)加上价值矩阵中的转移至下一状态的最大价值。
于是在python中定义如下回报矩阵和价值矩阵:
import numpy as np
import random
"""初始化价值矩阵"""
Q = np.zeros((6, 6))
"""定义回报矩阵R"""
R = np.array([[-1, -1, -1, -1, 0, -1],
[-1, -1, -1, 0, -1, 100],
[-1, -1, -1, 0, -1, -1],
[-1, 0, 0, -1, 0, -1],
[ 0, -1, -1, 0, -1, 100],
[-1, 0, -1, -1, 0, 100]])
定义未来远见系数为0.8:
gamma = 0.8
然后迭代求解价值矩阵Q,
"""迭代"""
for i in range(20000):
"""对每一次迭代,随机选择一种状态作为初始"""
state = random.randint(0, 5)
while True:
"""选择当前状态下的所有可能动作"""
actions = []
for action in range(6):
if R[state, action] >= 0:
actions.append(action)
"""随机选择一个可以行动的动作"""
state_next = actions[random.randint(0, len(actions) - 1)]
"""更新Q矩阵,通过当前状态,下一状态,该状态转移的回报,和该状态转移的价值。"""
Q[state, state_next] = R[state, state_next] + gamma * (Q[state_next]).max()
state = state_next
"""游戏最大可行动次数,达到即结束"""
if state == 5:
break
print((Q/Q.max()*100).astype(np.int))
将最后的结果归化至百分比值:
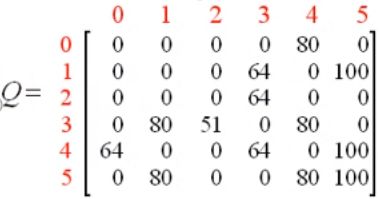
如此就能指导该机器人如何行动了。
但这只能解决状态有限,动作有限的问题。因为Q矩阵有明确的大小限制,只要有一样无限,则Q矩阵会无穷大,进而不能使用。甚至只要状态或是动作中有一个情况比较多时,则难以应用。例如游戏中,可进行的操作有限,但状态是无限的,每一帧的画面都是不同的,不可能穷举完。
5、DQN
DQN(Deep Q-Learning),因为Q学习只能解决状态有限动作有限的问题。
Q矩阵只是为了得到某一个状态下、选择某一动作的估值。
同时神经网络是一个万能的函数逼近器,只要足够大,能拟合任意函数。
于是可以使用神经网络来代替Q矩阵。
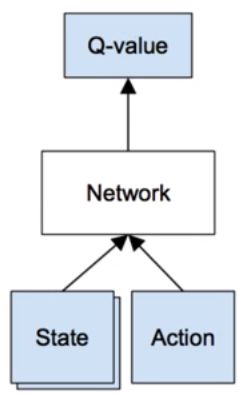
通过输入状态,和动作得到该状态、动作下的估值。
但当动作较多的时候,需要输入多次。
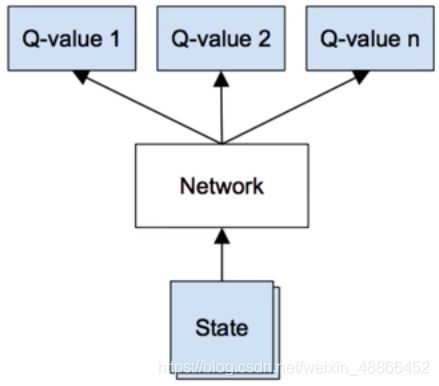
于是可以改为上图结构,输入状态,评估每一动作的价值。
6、玩CartPole游戏
gym平台上的CartPole游戏。游戏状态为二维向量,动作为0、1,控制杆子不掉下去。
则该网络输入为二维向量,输出也同样是二维向量,那么构建该网络:
class DQNet(nn.Module):
def __init__(self, num_state, num_actions):
"""
初始化网络
:param num_state: 输入状态数
:param num_actions: 输出动作数
"""
super(DQNet, self).__init__()
self.layer = nn.Sequential(
nn.Linear(num_state, 64),
nn.LeakyReLU(),
nn.Linear(64, 128),
nn.LeakyReLU(),
nn.Linear(2, num_actions)
)
def forward(self, input_):
return self.layer(input_)
然后根据Q矩阵的更新方式来更新神经网络。
数据的获取,需要让网络先试玩游戏,以获取经验:
experience_pool.append([state, R, action, state_next, done])
根据经验来训练网络,则损失为:
"""得到当前状态,动作下的估计值"""
valuations = q_net(state)
valuation = torch.gather(valuations, dim=1, index=action)
"""得到下一状态的估计值,并选择最大的估值"""
valuations_next = q_net(states_next)
valuations_max = torch.max(valuations_next, dim=1, keepdim=True)[0]
"""当前状态的目标估值按照Q函数计算"""
target = values + (1 - dons) * valuations_max * foresight
"""于是能够计算损失"""
loss = loss_function(valuation, target.detach())
AI游玩该游戏的效果。
代码