高斯过程回归的权空间观点推导及代码实现
文章目录
-
- 1.高斯过程简介
-
- 1.1定义
- 2.部分基础知识(已具备的直接跳至第3节)
-
- 2.1 部分矩阵计算基础
-
- 2.1.1 分块矩阵求逆
- 2.1.2 矩阵求逆引理
- 2.2 多元高斯分布
-
- 2.2.1 联合分布
- 2.2.2 条件概率分布
- 2.2.3 简单的线性高斯模型及贝叶斯定理
- 3.高斯过程回归的权空间观点推导
- 参考文献
1.高斯过程简介
1.1定义
高斯过程是随机变量的集合,其中任意有限个随机变量具有联合高斯分布。
在函数空间(function-space view)的观点中,高斯过程可以看作是一个定义在函数上的分布,并且直接在函数空间中进行inference。
与之等价的观点是权空间观点(weight-space view),在权空间中进行推断,对权向量的不同抽样将产生不同的函数,这与函数空间观点是一致的,但是函数空间的观点更为直接和抽象。
注 :为方便起见,本文不刻意区分概率密度和概率质量函数,向量用小写字母如 x x x表示,矩阵用大写字母如 X X X表示,标量将作特别说明。
2.部分基础知识(已具备的直接跳至第3节)
2.1 部分矩阵计算基础
2.1.1 分块矩阵求逆
感兴趣可看推导过程,否则直接看最后结论。
设矩阵
( A B C D ) \begin{pmatrix} A&B\\ C&D \end{pmatrix} (ACBD)
为可逆矩阵,下面求该矩阵的逆(推导是逆矩阵存在的假设下进行)。
设
( A B C D ) ( X Y ) = ( P Q ) \begin{pmatrix} A&B\\ C&D \end{pmatrix} \begin{pmatrix} X\\ Y \end{pmatrix}=\begin{pmatrix} P\\ Q \end{pmatrix} (ACBD)(XY)=(PQ),
可得
{ A X + B Y = P … … ( 1 ) C X + D Y = Q … … ( 2 ) \begin{cases} AX+BY=P\dots\dots(1)\\ CX+DY=Q\dots\dots(2) \end{cases} {AX+BY=P……(1)CX+DY=Q……(2)
由 ( 2 ) (2) (2)可得, Y = D − 1 ( Q − C X ) … … ( 3 ) Y=D^{-1}(Q-CX)\dots\dots(3) Y=D−1(Q−CX)……(3)
将 ( 3 ) (3) (3)带入(1)并移项整理可得,
X = ( A − B D − 1 C ) − 1 ( P − B D − 1 Q ) … … ( 4 ) X=(A-BD^{-1}C)^{-1}(P-BD^{-1}Q)\dots\dots(4) X=(A−BD−1C)−1(P−BD−1Q)……(4)
将 ( 4 ) (4) (4)带入 ( 3 ) (3) (3)整理可得,
Y = D − 1 ( Q − C ( A − B D − 1 C ) − 1 ( P − B D − 1 Q ) ) Y=D^{-1}(Q-C(A-BD^{-1}C)^{-1}(P-BD^{-1}Q)) Y=D−1(Q−C(A−BD−1C)−1(P−BD−1Q))
令 M = ( A − B D − 1 C ) − 1 M=(A-BD^{-1}C)^{-1} M=(A−BD−1C)−1,其实 M M M就是关于 D D D的舒尔补(The Shur complements)。
分别令
{ P = I Q = 0 及 { P = 0 Q = I \begin{cases} P=I\\ Q=\mathbf{}{0} \end{cases}及 \begin{cases} P=\mathbf{}{0}\\ Q=I \end{cases} {P=IQ=0及{P=0Q=I
其中 I I I为单位矩阵。
可得原分块矩阵的逆矩阵
( M − M B D − 1 − D − 1 C M D − 1 + D − 1 C M B D − 1 ) … … ( 5 ) \begin{pmatrix} M&-MBD^{-1}\\ -D^{-1}CM&D^{-1}+D^{-1}CMBD^{-1} \end{pmatrix}\dots\dots(5) (M−D−1CM−MBD−1D−1+D−1CMBD−1)……(5)
2.1.2 矩阵求逆引理
( A + B C D ) − 1 = A − 1 − A − 1 B ( I + C D A − 1 B ) − 1 C D A − 1 … … ( 6 ) (A+BCD)^{-1}=A^{-1}-A^{-1}B(I+CDA^{-1}B)^{-1}CDA^{-1}\dots\dots(6) (A+BCD)−1=A−1−A−1B(I+CDA−1B)−1CDA−1……(6)
其中矩阵 A A A可逆。
证明:
设 ( A + B C D ) X = I 设(A+BCD)X=I 设(A+BCD)X=I,其中 I I I为单位矩阵,则可得
{ A X + B Y = I … … ( 7 ) Y = B C X … … ( 8 ) \begin{cases} AX+BY=I\dots\dots(7)\\ Y=BCX\dots\dots(8) \end{cases} {AX+BY=I……(7)Y=BCX……(8)
由 ( 7 ) (7) (7)可得 X = A − 1 ( b − B Y ) X=A^{-1}(b-BY) X=A−1(b−BY),并带入 ( 8 ) (8) (8)整理得
Y = ( I + C D A − 1 B ) − 1 C D A − 1 Y=(I+CDA^{-1}B)^{-1}CDA^{-1} Y=(I+CDA−1B)−1CDA−1
回代得到
X = A − 1 − A − 1 B ( I + C D A − 1 B ) − 1 C D A − 1 X=A^{-1}-A^{-1}B(I+CDA^{-1}B)^{-1}CDA^{-1} X=A−1−A−1B(I+CDA−1B)−1CDA−1
2.2 多元高斯分布
2.2.1 联合分布
设 x x x是一个 n n n维向量,则其概率密度函数是
p ( x ) = 1 ( 2 π ) n 2 ∣ Σ ∣ 1 2 e x p { − 1 2 ( x − μ ) T Σ − 1 ( x − μ ) } … … ( 9 ) p(x) = \frac{1} {(2\pi)^\frac{n}{2} \begin{vmatrix} \Sigma \end{vmatrix} ^\frac{1}{2} } exp{\{ -\frac{1}{2}(x-\mu)^T\Sigma^{-1}(x-\mu) \}}\dots\dots(9) p(x)=(2π)2n∣∣Σ∣∣211exp{−21(x−μ)TΣ−1(x−μ)}……(9)
其中, Σ \Sigma Σ和 μ \mu μ分别是随机向量 x x x的协方差矩阵和均值向量。
多维高斯分布具有非常良好的性质:
- 边缘分布满足高斯分布。
- 条件分布满足高斯分布。
- 各分量的线性组合也是高斯随机变量。
2.2.2 条件概率分布
设随机向量 x x x符合多维高斯分布,将其分为不相交的两部分
x = ( x a x b ) x=\begin{pmatrix} x_a\\x_b \end{pmatrix} x=(xaxb),
x x x的均值向量
μ = ( μ a μ b ) \mu=\begin{pmatrix} \mu_a\\\mu_b \end{pmatrix} μ=(μaμb)
协方差矩阵为
Σ = ( Σ a a Σ a b Σ b a Σ b b ) \Sigma=\begin{pmatrix} \Sigma_{aa}&\Sigma_{ab}\\ \Sigma_{ba}&\Sigma_{bb} \end{pmatrix} Σ=(ΣaaΣbaΣabΣbb)
精度矩阵为
Λ = Σ − 1 = ( Λ a a Λ a b Λ b a Λ b b ) \Lambda=\Sigma^{-1}=\begin{pmatrix} \Lambda_{aa}&\Lambda_{ab}\\ \Lambda_{ba}&\Lambda_{bb} \end{pmatrix} Λ=Σ−1=(ΛaaΛbaΛabΛbb)
其中协方差矩阵是正定的,因为其对称性, Σ a b = Σ a b T \Sigma_{ab}=\Sigma_{ab}^T Σab=ΣabT, Λ a b = Λ a b T \Lambda_{ab}=\Lambda_{ab}^T Λab=ΛabT。
注意这是分块矩阵,不能对每个矩阵块简单求逆,我们使用公式 ( 5 ) (5) (5),可得
Λ a a = ( Σ a a − Σ a b Σ b b − 1 Σ b a ) − 1 … … ( 10 ) \Lambda_{aa}=(\Sigma_{aa}-\Sigma_{ab}\Sigma_{bb}^{-1}\Sigma_{ba})^{-1}\dots\dots(10) Λaa=(Σaa−ΣabΣbb−1Σba)−1……(10)
Λ a b = − ( Σ a a − Σ a b Σ b b − 1 Σ b a ) − 1 Σ a b Σ b b − 1 … … ( 11 ) \Lambda_{ab}=-(\Sigma_{aa}-\Sigma_{ab}\Sigma_{bb}^{-1}\Sigma_{ba})^{-1}\Sigma_{ab}\Sigma_{bb}^{-1}\dots\dots(11) Λab=−(Σaa−ΣabΣbb−1Σba)−1ΣabΣbb−1……(11)
接下来,我们求在给定 x b x_b xb的条件下, x a x_a xa的条件概率分布。注意到高斯分布的形式主要取决于指数项,因此我们使用配方法来找出相应的均值和协方差矩阵,而不需要考虑归一化系数,就可以得到条件分布的形式。
指数项为
− 1 2 ( x a − μ a ) T Λ a a ( x a − μ a ) − 1 2 ( x a − μ a ) T Λ a b ( x b − μ b ) − 1 2 ( x b − μ a ) T Λ b a ( x a − μ a ) − 1 2 ( x b − μ b ) T Λ b b ( x b − μ b ) … ( 12 ) -\frac{1}{2}(x_a-\mu_a)^T\Lambda_{aa}(x_a-\mu_a) -\frac{1}{2}(x_a-\mu_a)^T\Lambda_{ab}(x_b-\mu_b) -\frac{1}{2}(x_b-\mu_a)^T\Lambda_{ba}(x_a-\mu_a) -\frac{1}{2}(x_b-\mu_b)^T\Lambda_{bb}(x_b-\mu_b)\dots(12) −21(xa−μa)TΛaa(xa−μa)−21(xa−μa)TΛab(xb−μb)−21(xb−μa)TΛba(xa−μa)−21(xb−μb)TΛbb(xb−μb)…(12)
观察式(9)中指数项的形式,可发现精度矩阵出现在 x x x的二次项中,精度矩阵和均值的乘积出现在 x T x^T xT的线性项中,因此我们可得
Σ a ∣ b = Λ a a − 1 … … ( 13 ) Λ a b μ a ∣ b = Λ a a μ a − Λ a b ( x b − μ b ) … … ( 1 3 ′ ) \Sigma_{a|b}=\Lambda_{aa}^{-1}\dots\dots(13)\\ \Lambda_{ab}\mu_{a|b}=\Lambda_{aa}\mu_a-\Lambda_{ab}(x_b-\mu_b)\dots\dots(13') Σa∣b=Λaa−1……(13)Λabμa∣b=Λaaμa−Λab(xb−μb)……(13′)
由式(10)(11)可得
μ a ∣ b = ( μ a − Λ a a − 1 Λ a b ( x b − μ b ) ) … … ( 14 ) \mu_{a|b}=(\mu_a-\Lambda_{aa}^{-1}\Lambda_{ab}(x_b-\mu_b))\dots\dots(14) μa∣b=(μa−Λaa−1Λab(xb−μb))……(14)
这样我们就得到了 p ( x a ∣ x b ) p(x_a|x_b) p(xa∣xb)的分布,我们发现它的协方差是不依赖与 x b x_b xb的,而均值是 x b x_b xb的线性函数,这实际上是线性高斯模型的一个例子。
2.2.3 简单的线性高斯模型及贝叶斯定理
贝叶斯公式:
p ( x ∣ y ) = p ( x ) p ( y ∣ x ) p ( y ) … … ( 15 ) p(x|y)=\frac{p(x)p(y|x)}{p(y)}\dots\dots(15) p(x∣y)=p(y)p(x)p(y∣x)……(15)
我们设
x ∼ G a u s s i a n ( x ∣ μ , Λ − 1 ) y ∣ x ∼ G a u s s i a n ( y ∣ A x + b , L − 1 ) x\sim Gaussian(x|\mu, \Lambda^{-1})\\ y|x\sim Gaussian(y|Ax+b, L^{-1}) x∼Gaussian(x∣μ,Λ−1)y∣x∼Gaussian(y∣Ax+b,L−1)
其中 Λ 和 L \Lambda和L Λ和L为 x 和 y x和y x和y的精度矩阵, y y y的均值为 x x x的线性函数。
接下来,我们想要知道 z = ( x y ) z=\begin{pmatrix} x\\ y \end{pmatrix} z=(xy)的联合分布。
依然使用配方的方法,关注于指数项的系数。根据式(15)可得,
l n p ( z ) ∝ l n p ( x ) + l n p ( y ∣ x ) lnp(z)\propto lnp(x)+lnp(y|x) lnp(z)∝lnp(x)+lnp(y∣x)
因此观察
− 1 2 ( x − μ ) T Λ ( x − μ ) − 1 2 ( y − A x − b ) T L ( y − A x − b ) -\frac{1}{2}(x-\mu)^T\Lambda(x-\mu) -\frac{1}{2}(y-Ax-b)^TL(y-Ax-b) −21(x−μ)TΛ(x−μ)−21(y−Ax−b)TL(y−Ax−b)
整理二次项,有
− 1 2 x T ( Λ + A T L A ) x − 1 2 y T L y + 1 2 y T L A x + 1 2 x T A T L y = − 1 2 ( x T y T ) ( Λ + A T L A A T L L A L ) ( x y ) -\frac{1}{2}x^T(\Lambda+A^TLA)x -\frac{1}{2}y^TLy +\frac{1}{2}y^TLAx +\frac{1}{2}x^TA^TLy\\ =-\frac{1}{2}\begin{pmatrix}x^T&y^T\end{pmatrix} \begin{pmatrix} \Lambda+A^TLA&A^TL\\ LA&L \end{pmatrix} \begin{pmatrix} x\\ y \end{pmatrix} −21xT(Λ+ATLA)x−21yTLy+21yTLAx+21xTATLy=−21(xTyT)(Λ+ATLALAATLL)(xy)
因此可得精度矩阵
R [ z ] = ( Λ + A T L A A T L L A L ) … ( 16 ) R[z]=\begin{pmatrix} \Lambda+A^TLA&A^TL\\ LA&L \end{pmatrix}\dots(16) R[z]=(Λ+ATLALAATLL)…(16)
根据公式(5)可得协方差矩阵,
C o v [ z ] = ( Λ − 1 Λ − 1 A T A Λ − 1 L − 1 + A Λ − 1 A T ) … ( 17 ) Cov[z]=\begin{pmatrix} \Lambda^{-1}&\Lambda^{-1}A^T\\ A\Lambda^{-1}&L^{-1}+A\Lambda^{-1}A^T \end{pmatrix}\dots(17) Cov[z]=(Λ−1AΛ−1Λ−1ATL−1+AΛ−1AT)…(17)
再观察一次项
x T Λ μ − x T A T L b + y T L b = ( x y ) T ( Λ μ − A T L b L b ) x^T\Lambda\mu-x^TA^TLb+y^TLb=\begin{pmatrix}x\\y\end{pmatrix}^T \begin{pmatrix} \Lambda\mu-A^TLb\\ Lb \end{pmatrix} xTΛμ−xTATLb+yTLb=(xy)T(Λμ−ATLbLb)
由此并根据式(13’)(16)可得均值
E [ z ] = ( μ A μ + b ) … … ( 18 ) E[z]=\begin{pmatrix}\mu\\A\mu+b\end{pmatrix}\dots\dots(18) E[z]=(μAμ+b)……(18)
这个结果也是符合我们的直觉的,由此可得 y y y的边缘分布为
E [ y ] = A μ + b … … ( 19 ) C o v [ y ] = L − 1 + A Λ − 1 A T … … ( 20 ) E[y]=A\mu+b\dots\dots(19)\\ Cov[y]=L^{-1}+A\Lambda^{-1}A^T\dots\dots(20) E[y]=Aμ+b……(19)Cov[y]=L−1+AΛ−1AT……(20)
3.高斯过程回归的权空间观点推导
首先回想一般的线性回归模型,我们先不引入基函数,
y = x T w + ϵ y=x^Tw+\epsilon y=xTw+ϵ
其中 y , e p s i l o n y,epsilon y,epsilon是一维变量,代表实际数据值, ϵ \epsilon ϵ表示高斯噪声,我们假设
ϵ ∼ G a u s s i a n ( ϵ ∣ 0 , σ n 2 ) \epsilon \sim Gaussian(\epsilon|0, \sigma_n^2) ϵ∼Gaussian(ϵ∣0,σn2)
因此,由于训练样本 x x x是确定量,则
y ∣ w , x ∼ G a u s s i a n ( y ∣ x T w , σ n 2 ) y|w,x \sim Gaussian(y|x^Tw, \sigma_n^2) y∣w,x∼Gaussian(y∣xTw,σn2)
下面规定 Y Y Y为实际数据值组成的向量, X X X为输入 x x x组成的矩阵,这里我们反常的规定 X X X的每一列为一个输入,样本为
{ ( x i , y i ) , i = 1 , 2 , … n } , 其 中 x i 为 N 维 向 量 \{(x_i,y_i),i=1,2,\dots n \},其中x_i为N维向量 {(xi,yi),i=1,2,…n},其中xi为N维向量
我们先做出 w w w的先验分布假设,设
w ∼ G a u s s i a n ( w ∣ 0 , Σ p ) … … ( 21 ) w \sim Gaussian(w|0, \Sigma_p)\dots\dots(21) w∼Gaussian(w∣0,Σp)……(21)
Y的似然函数为
p ( Y ∣ w , X ) = ∏ i n p ( y i ∣ w , x i ) = G a u s s i a n ( Y ∣ X T w , σ n 2 I ) … … ( 22 ) p(Y|w, X)=\prod_{i}^np(y_i|w,x_i)=Gaussian(Y|X^Tw,\sigma_n^2I)\dots\dots(22) p(Y∣w,X)=i∏np(yi∣w,xi)=Gaussian(Y∣XTw,σn2I)……(22)
根据贝叶斯定理以及式(19)(20)可得 w w w的后验分布
w ∣ Y , X ∼ G a u s s i a n ( w ∣ σ n − 2 A − 1 X Y , A − 1 ) w|Y,X \sim Gaussian(w|\sigma_n^{-2}A^{-1}XY,A^{-1})\\ w∣Y,X∼Gaussian(w∣σn−2A−1XY,A−1)
其 中 A = Σ p − 1 + σ n − 2 X X T 其中A=\Sigma^{-1}_p+\sigma_n^{-2}XX^T 其中A=Σp−1+σn−2XXT
得到 w w w的后验分布之后,我们需要进行预测,即得到预测分布,给定测试样本 ( X ∗ , Y ∗ ) (X_*, Y_*) (X∗,Y∗),我们仍考虑测试样本点带有高斯噪声的情况。从根本上来说,我们最终想得到的不是带有噪声的样本值,而是得到生成这些数据的函数,这也符合定义中所述:高斯过程是一个定义在函数上的分布。假设预测的函数为 f ∗ f_* f∗,
则
p ( f ∗ ∣ X ∗ , X , Y ) = ∫ p ( f ∗ ∣ X ∗ , w ) p ( w ∣ X , Y ) d w p(f_*|X_*,X,Y)=\int p(f_*|X_*,w)p(w|X,Y)dw p(f∗∣X∗,X,Y)=∫p(f∗∣X∗,w)p(w∣X,Y)dw
f ∗ ∣ X ∗ , w ∼ G a u s s i a n ( f ∗ ∣ X ∗ T w , σ n 2 I ) f_*|X_*,w\sim Gaussian(f_*|X_*^Tw,\sigma_n^2I) f∗∣X∗,w∼Gaussian(f∗∣X∗Tw,σn2I)
这同样是一个线性高斯模型,我们需要求解边缘概率分布,由式(19)(20)可得
f ∗ ∣ X ∗ , X , Y ∼ G a u s s i a n ( f ∗ ∣ σ n − 2 X ∗ T A − 1 X Y , X ∗ T A − 1 X ∗ ) f_*|X_*,X,Y\sim Gaussian(f_*|\sigma_n^{-2}X_*^TA^{-1}XY,X_*^TA^{-1}X_*) f∗∣X∗,X,Y∼Gaussian(f∗∣σn−2X∗TA−1XY,X∗TA−1X∗)
其中
A = Σ p − 1 + σ n − 2 X X T A=\Sigma^{-1}_p+\sigma_n^{-2}XX^T A=Σp−1+σn−2XXT
接下来,我们引入基函数,用基函数 ϕ ( . ) \phi(.) ϕ(.)将样本输入 x i x_i xi映射到高维特征空间,用 ϕ ( x i ) 或 ϕ i \phi(x_i)或\phi_i ϕ(xi)或ϕi来表示映射后的特征向量(feature vector,与eigenvector区分),用 Φ \Phi Φ表示特征向量组成的矩阵。
则
f ∗ ∣ X ∗ , X , Y ∼ G a u s s i a n ( f ∗ ∣ σ n − 2 Φ ∗ T A − 1 X Y , Φ ∗ T A − 1 Φ ∗ ) … … ( 23 ) f_*|X_*,X,Y\sim Gaussian(f_*|\sigma_n^{-2}\Phi_*^TA^{-1}XY,\Phi_*^TA^{-1}\Phi_*)\dots\dots(23) f∗∣X∗,X,Y∼Gaussian(f∗∣σn−2Φ∗TA−1XY,Φ∗TA−1Φ∗)……(23)
其中
A = Σ p − 1 + σ n − 2 Φ Φ T … … ( 24 ) A=\Sigma^{-1}_p+\sigma_n^{-2}\Phi\Phi^T\dots\dots(24) A=Σp−1+σn−2ΦΦT……(24)
但是显示表示一个合适的基函数(basis function)不是一件容易的事情,更别说加上一个先验的协方差矩阵,因此我们隐式的引入这一式子。
我们设 K = Φ T Σ p Φ K=\Phi^T\Sigma_p\Phi K=ΦTΣpΦ,我们先对式(24)进行处理。
等式两边同时左乘 A − 1 A^{-1} A−1,右乘 Σ p Φ \Sigma_p\Phi ΣpΦ,进行整理并带入 K K K可得
A − 1 Φ = σ n 2 Σ p Φ ( σ n 2 I + K ) − 1 … … ( 25 ) A^{-1}\Phi=\sigma_n^{2}\Sigma_p\Phi(\sigma_n^{2}I+K)^{-1}\dots\dots(25) A−1Φ=σn2ΣpΦ(σn2I+K)−1……(25)
将(25)式代入(23)的均值部分可得,
E [ f ∗ ] = Φ ∗ T Σ p Φ ( σ n 2 I + K ) − 1 Y E[f_*]=\Phi_*^T\Sigma_p\Phi(\sigma_n^{2}I+K)^{-1}Y E[f∗]=Φ∗TΣpΦ(σn2I+K)−1Y
利用矩阵求逆引理(6)可得 A − 1 A^{-1} A−1并带入(23)的协方差部分,可得
C o v [ f ∗ ] = Φ ∗ T Σ p Φ ∗ − Φ ∗ T Σ p Φ ( σ n 2 I + K ) − 1 Φ T Σ p Φ ∗ Cov[f_*]= \Phi_*^T\Sigma_p\Phi_*-\Phi_*^T\Sigma_p\Phi(\sigma_n^{2}I+K)^{-1}\Phi^T\Sigma_p\Phi_* Cov[f∗]=Φ∗TΣpΦ∗−Φ∗TΣpΦ(σn2I+K)−1ΦTΣpΦ∗
最后,我们引入核函数这个概念,设核函数 K ( X , X ) = Φ T Σ p Φ K(X,X)=\Phi^T\Sigma_p\Phi K(X,X)=ΦTΣpΦ,
以此类推, K ( X ∗ , X ) = Φ ∗ T Σ p Φ K(X_*,X)=\Phi_*^T\Sigma_p\Phi K(X∗,X)=Φ∗TΣpΦ, K ( X ∗ , X ∗ ) = Φ ∗ T Σ p Φ ∗ K(X_*,X_*)=\Phi_*^T\Sigma_p\Phi_* K(X∗,X∗)=Φ∗TΣpΦ∗
我们这里介绍常用的高斯核函数 k ( x , x ′ ) = σ 2 e x p { ∣ x − x ′ ∣ 2 l } k(x,x')=\sigma^2 exp\{\frac{|x-x'|^2}{l}\} k(x,x′)=σ2exp{l∣x−x′∣2},其中 l l l是高斯过程的length-scale,这里不做过多解释。
最后的形式为
E [ f ∗ ] = K ( X ∗ , X ) ( σ n 2 I + K ( X , X ) ) − 1 Y E[f_*]=K(X_*,X)(\sigma_n^{2}I+K(X,X))^{-1}Y E[f∗]=K(X∗,X)(σn2I+K(X,X))−1Y
C o v [ f ∗ ] = K ( X ∗ , X ∗ ) − K ( X ∗ , X ) ( σ n 2 I + K ( X , X ) ) − 1 K ( X , X ∗ ) Cov[f_*]= K(X_*,X_*)-K(X_*,X)(\sigma_n^{2}I+K(X,X))^{-1}K(X,X_*) Cov[f∗]=K(X∗,X∗)−K(X∗,X)(σn2I+K(X,X))−1K(X,X∗)
至此,权空间视角的推导过程就结束了。
下面是python实现代码:
gaussian_process_regression.py
import numpy as np
class GaussianProcessRegressor:
"""
kernel: RBF(sigma_overall, l_scale)
alpha: noise, 1-D array or scaler
"""
def __init__(self, kernel, sigma_overall, l_scale, alpha=0.):
self.kernel = kernel(sigma_overall, l_scale)
self.alpha = alpha
def fit(self, X, y):
X = np.asarray(X)
y = np.asarray(y)
self.train_x_ = X
self.train_y_ = y
def predict(self, X, return_cov=True, return_std=False):
if return_cov and return_std:
raise RuntimeError("return_cov, return_std can't be True in the same time")
if not hasattr(self, 'train_x_'):
y_mean = np.zeros(X.shape[0])
if return_cov:
y_cov = self.kernel(X, X)
return y_mean, y_cov
elif return_std:
y_cov = self.kernel(X, X)
return y_mean, np.sqrt(np.diag(y_cov))
else:
return y_mean
K = self.kernel(self.train_x_, self.train_x_)
L = np.linalg.cholesky(K + self.alpha * np.eye(self.train_x_.shape[0]))
alpha = np.linalg.solve(L, self.train_y_)
alpha = np.linalg.solve(L.T, alpha)
y_mean = self.kernel(self.train_x_, X).T @ alpha
v = np.linalg.solve(L, self.kernel(self.train_x_, X))
y_cov = self.kernel(X, X) - v.T @ v + self.alpha * np.eye(X.shape[0])
if return_cov:
return y_mean, y_cov
elif return_std:
return y_mean, np.sqrt(np.diag(y_cov))
else:
return y_mean
def sample_func(self, X, n_samples=1):
y_mean, y_cov = self.predict(X, return_cov=True, return_std=False)
sampled_y = np.random.multivariate_normal(y_mean, y_cov, size=n_samples)
return sampled_y
kernel.py
import numpy as np
class RBFKernel:
def __init__(self, sigma, scale):
self.sigma = sigma
self.scale = scale
def __call__(self, x1: np.ndarray, x2: np.ndarray):
m, n = x1.shape[0], x2.shape[0]
K_matrix = np.zeros((m, n), dtype=float)
for i in range(m):
for j in range(n):
K_matrix[i, j] = self.sigma * np.exp(-0.5 * np.sum((x1[i] - x2[j]) ** 2) / self.scale)
return K_matrix
测试代码:
from gaussian_process import RBFKernel, GaussianProcessRegressor
import numpy as np
import matplotlib.pyplot as plt
def get_y(x, alpha):
return np.cos(x)*0.3 + np.random.normal(0, alpha, size=x.shape)
observation_size = 6
gpr = GaussianProcessRegressor(RBFKernel, sigma_overall=0.04, l_scale=0.5, alpha=1e-4)
sample_size = 3
test_x = np.linspace(0, 10, 100)
prior_mean, prior_cov = gpr.predict(test_x, return_cov=True)
sample_ys = gpr.sample_func(test_x, n_samples=sample_size)
uncertainty = 1.96 * np.sqrt(np.diag(prior_cov))
plt.plot(test_x, prior_mean, label='mean')
plt.fill_between(test_x, prior_mean-uncertainty, prior_mean+uncertainty, alpha=0.1)
for i in range(sample_size):
plt.plot(test_x, sample_ys[i], linestyle='--')
plt.legend()
plt.title('prior')
plt.show() # 至此绘制先验分布
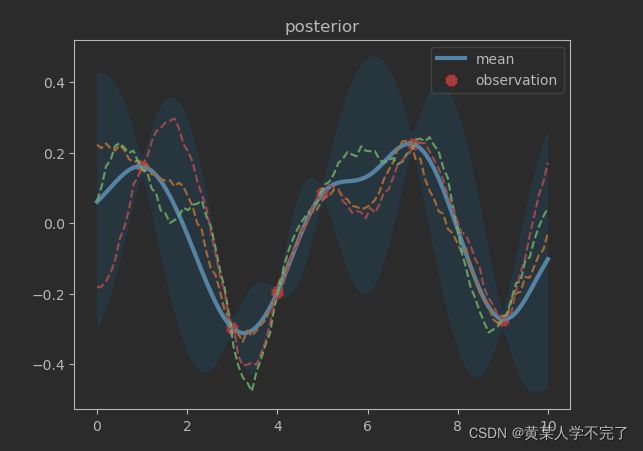
train_x = np.array([3, 1, 4, 5, 7, 9])
train_y = get_y(train_x, alpha=1e-4)
gpr.fit(train_x, train_y)
y_mean, y_cov = gpr.predict(test_x, return_cov=True)
sample_ys = gpr.sample_func(test_x, n_samples=sample_size)
uncertainty = 1.96 * np.sqrt(np.diag(y_cov))
plt.plot(test_x, y_mean, label='mean', linewidth=3)
plt.fill_between(test_x, y_mean-uncertainty, y_mean+uncertainty, alpha=0.1)
for i in range(sample_size):
plt.plot(test_x, sample_ys[i], linestyle='--')
plt.scatter(train_x, train_y, c='red', marker='x', label='observation', linewidths=5)
plt.legend()
plt.title('posterior')
plt.show() # 绘制后验分布
运行效果如下

下次补充函数空间的观点。
本人大二,水平有限,若有不严谨之处,请见谅。
参考文献
[1]C. E. Rasmussen & C. K. I. Williams.(2006). Gaussian Processes for Machine Learning.7-29.
[2]Christopher M. Bishop.(2007). Pattern Recognition and Machine Learning. 78-93.