OpenCV图像处理技术之图像梯度与Canny边缘检测
 Fu Xianjun. All Rights Reserved.所有素材来自于小傅老师。
Fu Xianjun. All Rights Reserved.所有素材来自于小傅老师。
我们开始今天的学习!图像梯度与Canny边缘检测
重点:梯度算子数学意义
难点:Canny边缘检测基础
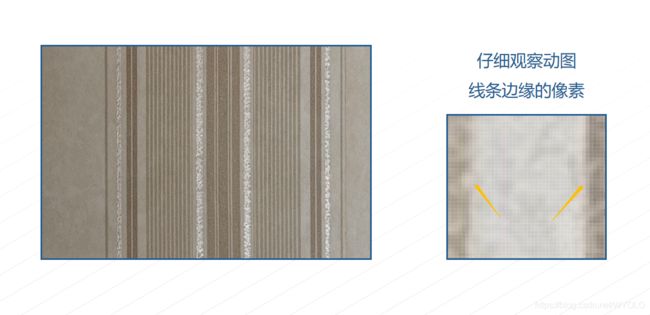
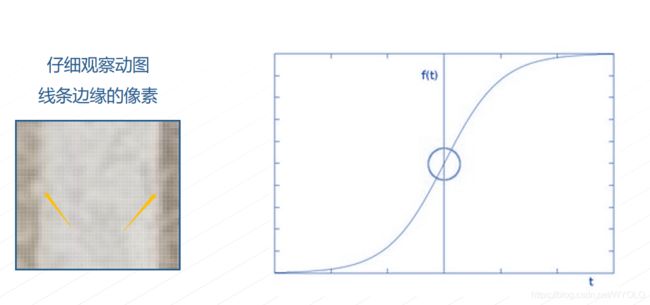
先来看几张图了解一下吧!
任务一:Sobel算子
dst=cv2.Sobel(src,ddepth,dx,dy[,ksize[,scale[,delta[,borderType]]]]
dx代表x方向上的求导阶数 dy代表y方向上的求导阶数
计算x方向和y方向的边缘叠加:通过组合方式实现 dx=cv2.Sobel(src ,ddepth ,1 ,0) dy=cv2.Sobel(src ,ddepth ,0 ,1) dst=cv2.addWeighted(src1 ,alpha ,src2 ,beta ,gamma
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
#因为右侧像素减去左边像素,存在负值的情况,因此使用cv2.convertScaleAbs取绝对值操作
sobelx = cv2.convertScaleAbs(sobelx)
cv_show("sobelx",sobelx)
编程实现计算peppa的sobel边缘
peppa = cv2.imread("peppa.png",0)
sobelx = cv2.Sobel(peppa,cv2.CV_64F,1,0)
sobelx=cv2.convertScaleAbs(sobelx)
sobely = cv2.Sobel(peppa,cv2.CV_64F,1,0)
sobely=cv2.convertScaleAbs(sobely)
sobel_demo = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
#sobel_demo = sobelx+sobely
cv_show("sobel_demo",sobel_demo)
Scharr算子
Scharrx = cv2.Scharr(peppa,cv2.CV_64F,1,0)
Scharry = cv2.Scharr(peppa,cv2.CV_64F,0,1)
Scharrx = cv2.convertScaleAbs(Scharrx)
Scharry = cv2.convertScaleAbs(Scharrx)
Scharr_demo = cv2.addWeighted(Scharrx,0.5,Scharry,0.5,0.5)
cv2.imshow("Scharr_demo",Scharr_demo)
cv2.imshow("sobel_demo",sobel_demo)
cv2.waitKey()
cv2.destroyAllWindows()
任务二:Laplacian算子
laplacian = cv2.Laplacian(img,cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian)
cv2.imshow("laplacian_demo",laplacian)
cv2.waitKey()
cv2.destroyAllWindows()
任务三:Canny边缘检测
由于图像边缘非常容易受到噪声的干扰,通常需要对图像进行滤波以去除噪声。滤波的目的是平滑一些纹理较弱的非边缘区域,以便得到更准确的边缘。
滤波器的大小也是可变的,高斯核的大小对于边缘检测的效果具有很重要的作用。 滤波器的核越大,边缘信息对于噪声的敏感度就越低,但边缘检测的定位错误也会随之增加。

edges=cv2.Canny(image,threshold1,threshold2[,apertureSize[,L2gradient]])
threshold1表示处理过程中的第一个阈值。 threshold2表示处理过程中的第二个阈值。 apertureSize表示Sobel算子的孔径大小。 L2gradient为计算图像梯度幅度(gradient magnitude)的标识。其默认值为False。
Canny边缘检测
利用Canny函数,探索不同阈值的边缘提取效果
Canny边缘检测
1) 使用高斯滤波器,以平滑图像,滤除噪声。
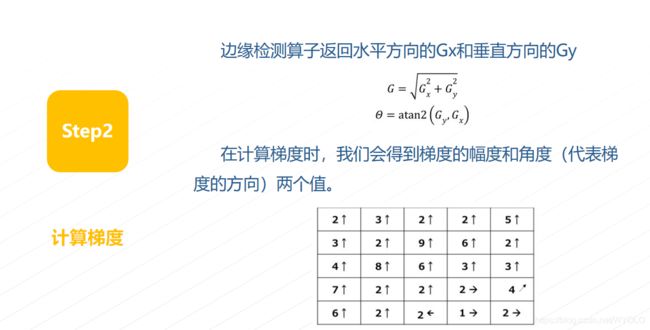
2) 计算图像中每个像素点的梯度强度和方向。
3) 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
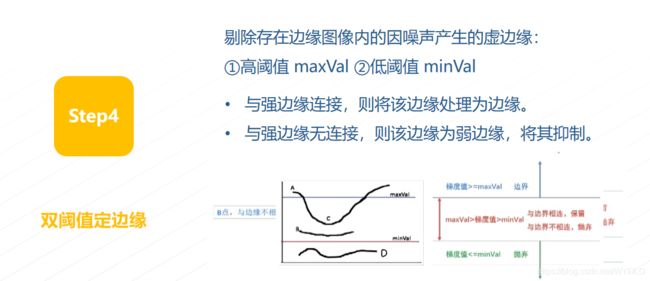
4) 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5) 通过抑制孤立的弱边缘最终完成边缘检测。
v1=cv2.Canny(peppa,80,150)
v2=cv2.Canny(peppa,50,100)
cv2.imshow("v1",v1)
cv2.imshow("v2",v2)
cv2.waitKey()import cv2
def doCanny(x):
position = cv2.getTrackbarPos("CannyBar", "Canny")
canny = cv2.Canny(gauss, position, position*2.5)
cv2.imshow("Canny", canny)
img = cv2.imread("peppa.png",0)
gauss = cv2.GaussianBlur(img, (3, 3), 1)cv2.namedWindow("Canny")
cv2.createTrackbar("CannyBar", "Canny", 1, 100, doCanny)
cv2.waitKey()
cv2.destroyAllWindows()
任务四:Canny实战:车道检测
import cv2
import numpy as npdef canny(image):
gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)
blur = cv2.GaussianBlur(gray,(5,5),0)#降低噪点
canny = cv2.Canny(blur,50,150)
return cannydef region_of_interest(image):#应用遮罩
height = image.shape[0]
ploygons = np.array([[(200,height),(1100,height),(550,250)]])
mask = np.zeros_like(image)
cv2.fillPoly(mask,ploygons,255)
masked_image = cv2.bitwise_and(image,mask)#通过 bitwise_and 对两个图像的每一个像素做与运算,来将遮罩应用图像
return masked_image# read image
image = cv2.imread('test_image.webp')
# copy not reference to
lane_image = np.copy(image)
canny = canny(lane_image)
cv2.imshow('canny',canny)
cv2.imshow('region_of_interest(canny)',region_of_interest(canny))cv2.waitKey(0)
今天的学习你学废了吗!
拜拜我们下期见!